
技术摘要:
本发明的一种基于拓扑地图的预测性多AGV任务分配方法,属于自动控制技术领域。方法为建立拓扑地图,记录并保存所有的节点、路径信息,确定空闲AGV的数量和待分配的AGV任务后构建代价函数,计算各空闲AGV分别完成各待分配任务的代价值,选定代价值最小准则并获取符合实 全部
背景技术:
作为智能物流核心设备之一的AGV(Automated Guided Vehicle,自动导引运输 车)近年来出现了爆发式的增长,而以智能化为主,可以自主导航的AGV也已被广泛应用于 智能物流仓储领域。而在实际场景中可能需要多辆AGV同时运行,这就使得给各个AGV分配 的任务是否合理显得尤为重要,否则会造成运行效率过低、资源浪费等,更严重的可能会造 成AGV之间发生碰撞。 而现在大多数的任务分配方法采用的是将任务分配给距离任务站点相邻最近的 AGV,此种采用局部优化的方法不仅效率低而且可能会造成工作场景下的混乱从而可能使 得事故发生概率增加。
技术实现要素:
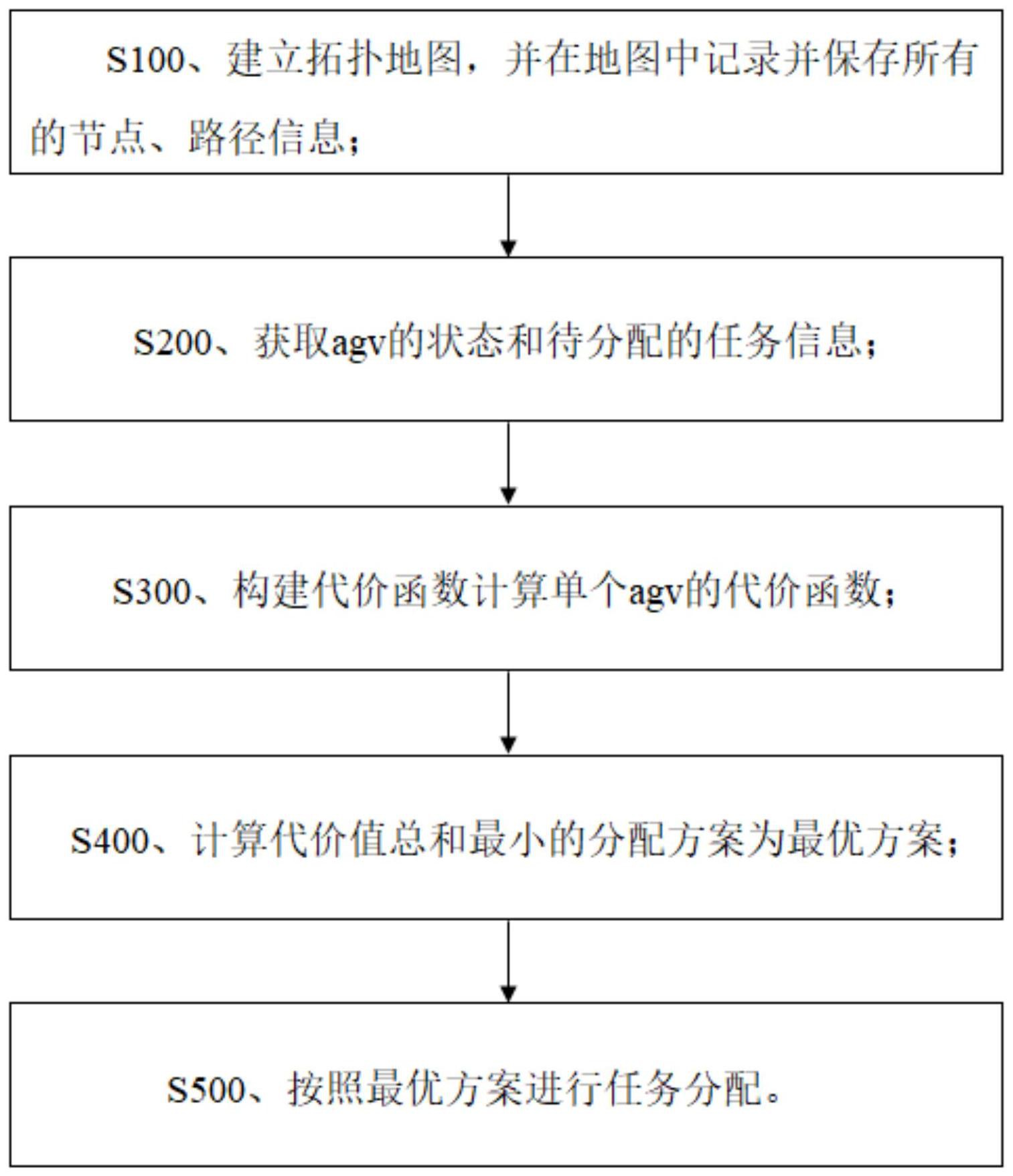
1.发明要解决的技术问题 本发明的目的在于解决现有的AGV任务分配方法效率低且容易造成混乱的问题。 2.技术方案 为达到上述目的,本发明提供的技术方案为: 本发明的一种基于拓扑地图的预测性多AGV任务分配方法,建立拓扑地图,记录并 保存所有的节点、路径信息,确定空闲AGV的数量和待分配的AGV任务后构建代价函数,计算 各空闲AGV分别完成各待分配任务的代价值,选定代价值最小准则并获取符合实际需求的 最小代价值,根据选定的最小代价值原则分配任务。 优选的,具体包括如下步骤: S100、建立拓扑地图,并在地图中记录并保存所有的节点、路径信息; S200、获取agv的状态和待分配的任务信息; S300、构建代价函数计算单个agv的代价函数 S400、计算代价值总和 最小的分配方案为最优方案; S500、按照最优方案进行任务分配。 优选的,所述步骤S100中,拓扑地图的建立规则为权重正负代表的是路径方向,保 证两条不同路径的交点都是节点。 优选的,所述步骤S200中,所述agv的状态为当且仅当agv无任务且静止时表明其 处于空闲状态,空闲agv数量记为n,设未分配任务的总数量为m,当m>n时,取m=n,根据任务 发布时间优先分配发布较早的前m个任务。 优选的,所述步骤S200中,当agv获取到任务后即置为繁忙状态,且其到达目标位 4 CN 111582579 A 说 明 书 2/4 页 置并完成该项任务后状态更改为空闲状态,当指定agv完成一项任务时,若该agv处于空闲 状态则立即执行该任务,若处于繁忙状态则完成当前任务后立即执行指定任务。 优选的,所述步骤S200中,当指定某任务具有最高优先级且未指定agv,则将其分 配给空闲叉车中完成这一任务预测时间最短的agv。 优选的,所述步骤S300中,单个agv的代价函数包括单个agv完成任务的时间为 和预测等待时间 优选的,所述单个agv完成任务的时间计算公式为: 其中,v为agv运行 的速度,AiBj为单个agv单个任务所经过的路径,i和j都是正整数,0<i≤n,0<j≤m,A为各 agv的位置信息列表A={A1,A2,…An},B为任务终点列表B={B1,B2,…Bm}。 优选的,所述单个agv的预测等待时间的计算公式: 预测等待 时间为当两个agv可能相向或者在路径节点相遇时发生碰撞需要交通管制时,优先级低的 agv提前停在某个节点让行优先级高的agv所消耗的时间,若第i辆agv与其他agv无相同节 点或者在T时刻距离任务终点最近,则 为0,若存在第i辆与第k辆相比更远则令tik=C,C 为agv停止等待另一辆agv通过的时间。 3.有益效果 采用本发明提供的技术方案,与现有技术相比,具有如下有益效果: 本发明的一种基于拓扑地图的预测性多AGV任务分配方法,建立拓扑地图,记录并 保存所有的节点、路径信息,确定空闲AGV的数量和待分配的AGV任务后构建代价函数,计算 各空闲AGV分别完成各待分配任务的代价值,选定代价值最小准则并获取符合实际需求的 最小代价值,根据选定的最小代价值原则分配任务。通过确定空闲AGV的数量和待分配的 AGV任务后构建代价函数,选取代价函数的最小代价值为最优方案,使得agv的实际运行效 率大大提高,同时不会造成AGV任务分配混乱。 附图说明 图1为本发明的一种基于拓扑地图的预测性多AGV任务分配方法的流程图; 图2为本实施例的拓扑地图示意图。











