
技术摘要:
本申请公开了一种基于无线智能遥控的飞行器控制系统。该控制系统包括:包括:主控装置、传感器装置、定位装置、信息采集装置、无线通讯装置、保护装置、驱动装置和校正装置;所述传感器装置与所述主控装置连接,所述主控装置与所述定位装置、所述信息采集装置、所述无 全部
背景技术:
随着无人飞行器逐步进入消费级市场,尤其是多旋翼飞行器,典型地,如四轴多旋 翼飞行器,已经成为实施航拍的首选设备。随着应用市场的进一步细分,无人飞行器航拍领 域,正从专业消费级无人飞行器中分离出日常消费级无人飞行器,出现了小型化、便携化、 操作简单化的自拍无人飞行器。 无人飞行器尤其是航拍飞行器已经开始广泛受到关注和普及,然而实际消费者使 用过程中仍然在反映,航拍飞行器的操控还是太难,影响了航拍飞行器的市场前景。 然而,现有的无人飞行器操作复杂,智能化程度不高,同时其飞行动作的控制是通 过摇杆等设备进行控制,操作难度高,灵活度差。 针对相关技术在中现有的无人飞行器操作复杂,智能化程度不高,同时其飞行动 作的控制是通过摇杆等设备进行控制,操作难度高,灵活度差的问题,目前尚未提出有效的 解决方案。
技术实现要素:
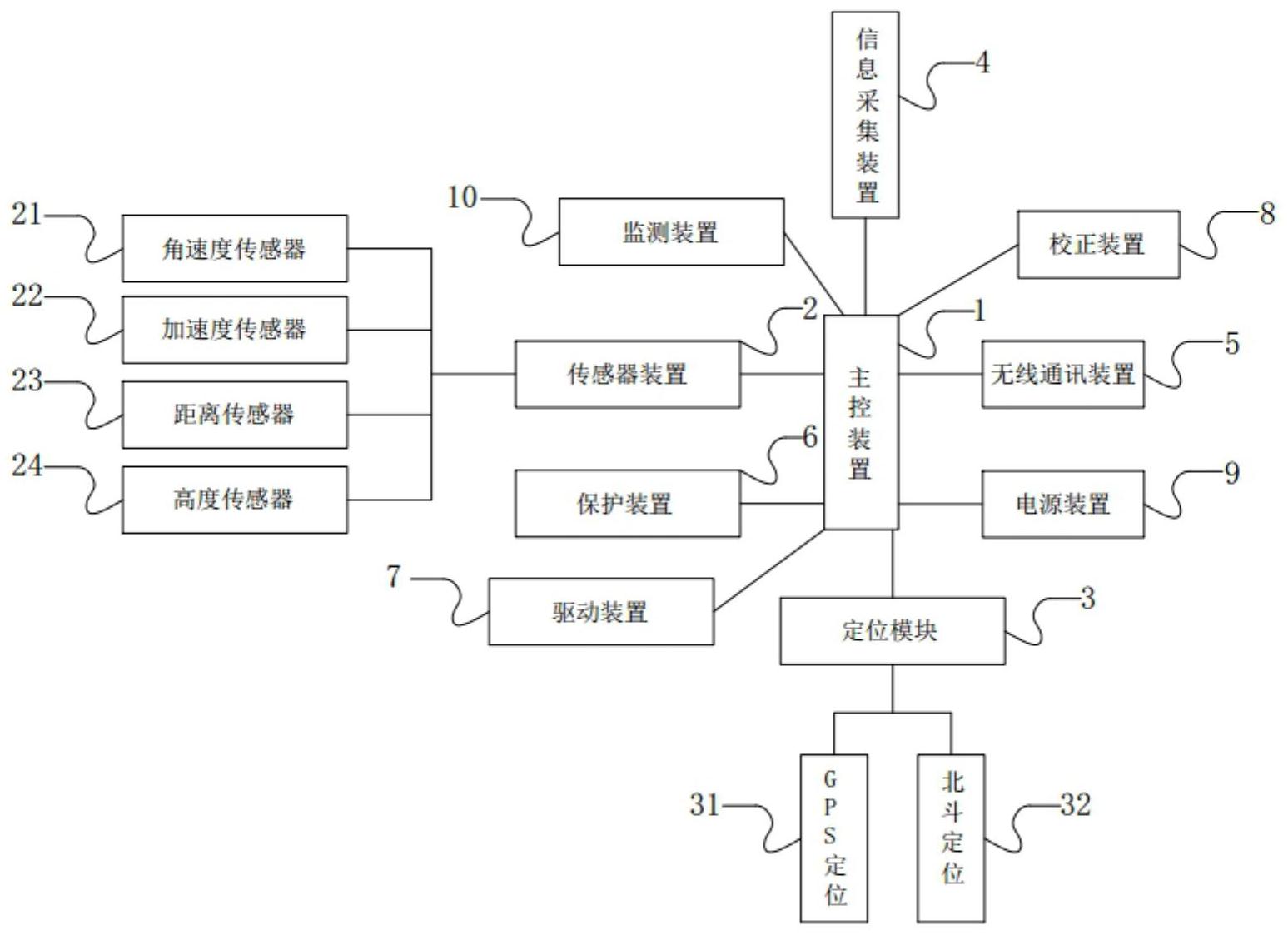
本申请的主要目的在于提供一种基于无线智能遥控的飞行器控制系统,以解决现 有的无人飞行器操作复杂,智能化程度不高,同时其飞行动作的控制是通过摇杆等设备进 行控制,操作难度高,灵活度差的问题。 为了实现上述目的,根据本申请的一个方面,提供了一种基于无线智能遥控的飞 行器控制系统。 根据本申请的一种基于无线智能遥控的飞行器控制系统,包括:主控装置、传感器 装置、定位装置、信息采集装置、无线通讯装置、保护装置、驱动装置和校正装置;所述传感 器装置与所述主控装置连接,所述主控装置与所述定位装置、所述信息采集装置、所述无线 通讯装置、所述保护装置、所述驱动装置和所述校正装置连接;所述传感器装置包括:角速 度传感器、加速度传感器、高度传感器和距离传感器,所述角速度传感器、所述加速度传感 器、所述高度传感器和所述距离传感器设置于飞行器;所述主控装置用于发出控制信号控 制所述传感器装置、所述定位装置、所述信息采集装置、所述无线通讯装置、所述保护装置、 所述驱动装置和所述校正装置动作;所述驱动装置,用于提供驱动力;所述校正装置,用于 对反馈的数据进行校正;所述无线通讯装置,用于传输无线信号至智能端。 进一步的,还包括:电源装置,所述电源装置与所述主控装置电连接。 进一步的,所述主控装置包括:一个或多个处理器,一个或多个所述处理器与所述 驱动装置连接。 进一步的,还包括:监测装置,所述监测装置与所述主控装置连接,用于监测飞行 3 CN 111552321 A 说 明 书 2/5 页 器的状态。 进一步的,所述无线通讯装置为WIFI、ZigBee、蓝牙和RFID中的一种或多种。 进一步的,所述主控装置型号为STC90C52AD。 为了实现本发明,本发明提供一种飞行器控制方法: 所述控制方法包括: 采集飞行器的飞行数据参数; 根据所述飞行数据参数进行计算和校正; 将校正后的数据,运用VRML语言输入并建立3D模型; 利用LabVIEW软件对该模型进行图像处理和显示,并与飞行器远程通讯。 进一步的,所述采集飞行器的飞行数据参数之后,还包括:分析所述数据参数以确 定所述飞行器的异常操作条件。 进一步的,还包括:飞行器异常状态保护动作。 在本申请实施例中,采用主控装置无线控制的方式,通过将传感器装置与主控装 置连接,主控装置与定位装置、信息采集装置、无线通讯装置、保护装置、驱动装置和校正装 置连接,达到了无线控制的目的,从而实现了降低控制难度和提高操作便捷性的技术效果, 进而解决了现有的无人飞行器操作复杂,智能化程度不高,同时其飞行动作的控制是通过 摇杆等设备进行控制,操作难度高,灵活度差的技术问题。 附图说明 构成本申请的一部分的附图用来提供对本申请的进一步理解,使得本申请的其它 特征、目的和优点变得更明显。本申请的示意性实施例附图及其说明用于解释本申请,并不 构成对本申请的不当限定。在附图中: 图1是本发明一种基于无线智能遥控的飞行器控制系统示意图; 图2是本发明一种基于无线智能遥控的飞行器控制方法流程示意图1; 图3是本发明一种基于无线智能遥控的飞行器控制方法流程示意图2。 1、主控装置;2、传感器装置;21、角速度传感器;22、加速度传感器;23、距离传感 器;24、高度传感器;3、定位装置;31、GPS定位;32、北斗定位;4、信息采集装置;5、无线通讯 装置;6、保护装置;7、驱动装置;8、校正装置;9、电源装置;10、监测装置。











