
技术摘要:
本发明提供基于水利的水面漂浮物清理的捕捞分类收集装置,涉及环保清洁领域,解决了在捕捞的过程中不能够时间不同大小漂浮物的分类收集,在打捞后往往还需要手动进行分类;需要多个电动元件来实现打捞臂的上下移动、旋转捞取以及卸料动作,而不能够通过一点电动元件配 全部
背景技术:
环保清洁设备是随着人们对环境保护要求的提高而兴起的一类设备。目前公园景 区里的小湖面有许多的轻质的漂浮物,对环境景观造成不美观,进而会形成一定的污染,目 前大多是人工式的打捞或者是简易的打捞船,人工打捞费时费力,需要工人划船进行地毯 式的打捞工作效率比较低,而现有的遥控打捞船对于打捞面积相对局限,工作效率较低,所 能作业的范围非常局限,对整个打捞工作都比较费时费力。 如申请号:CN201410398395.5,本发明提供了一种漂浮物打捞船,包括了船身以及 均设于所述船身上的置物筐、打捞单元、伸展单元、驱动单元、转向单元和控制单元,所述控 制单元用以依据陆上的控制设备实现对所述打捞单元、伸展单元、驱动单元和转向单元的 控制;所述打捞单元用以将漂浮物打捞至所述置物筐内;所述驱动单元用以驱动所述船身 行进;所述转向单元用以实现所述船身的转向;所述伸展单元用以在船身移动时,将漂浮物 收容于伸展单元内侧,以供所述打捞单元进行打捞。 基于对申请号:CN201410398395.5,的检索以及现有装置的对比发现,目前还存在 以下几点不足: 一个是,上述申请虽然能够实现自行驱动和汇集漂浮物,但是在捕捞的过程中不 能够时间不同大小漂浮物的分类收集,在打捞后往往还需要手动进行分类,实用性较低;再 者是,现有捞取式打捞装置在工作过程中需要多个电动元件来实现打捞臂的上下移动、旋 转捞取以及卸料动作,而不能够通过一点电动元件配合联动结构来实现上述动作,制造成 本较高。 于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供基于水利的水面漂浮 物清理的捕捞分类收集装置,以期达到更具有更加实用价值性的目的。
技术实现要素:
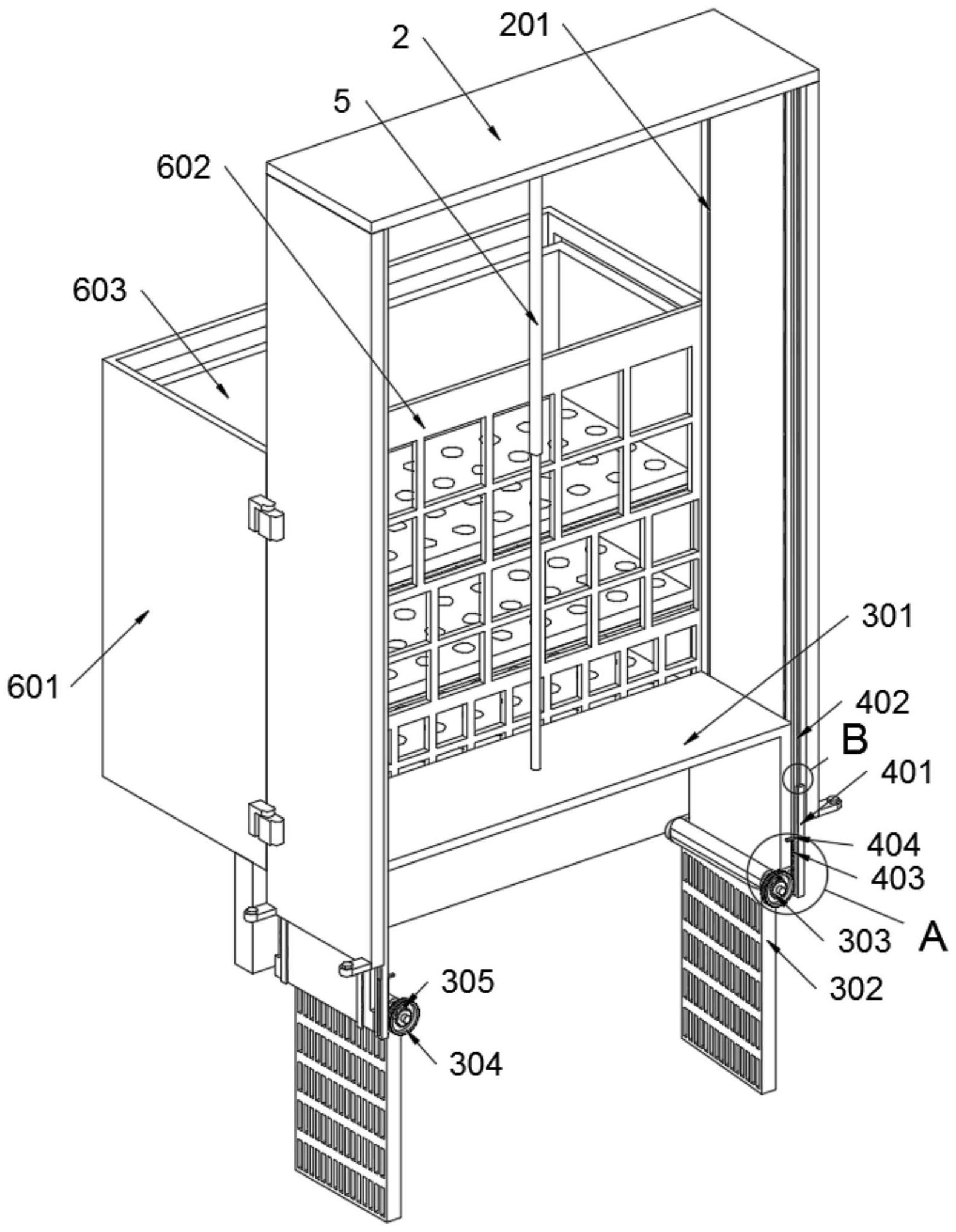
为了解决上述技术问题,本发明提供基于水利的水面漂浮物清理的捕捞分类收集 装置,以解决现有一个是,上述申请虽然能够实现自行驱动和汇集漂浮物,但是在捕捞的过 程中不能够时间不同大小漂浮物的分类收集,在打捞后往往还需要手动进行分类,实用性 较低;再者是,现有捞取式打捞装置在工作过程中需要多个电动元件来实现打捞臂的上下 移动、旋转捞取以及卸料动作,而不能够通过一点电动元件配合联动结构来实现上述动作, 制造成本较高的问题。 本发明基于水利的水面漂浮物清理的捕捞分类收集装置的目的与功效,由以下具 体技术手段所达成: 基于水利的水面漂浮物清理的捕捞分类收集装置,包括气垫船主体和齿轮套;所 4 CN 111608150 A 说 明 书 2/5 页 述气垫船主体上通过螺栓固定连接有一个主体架,且主体架上滑动设置有捕捞结构,并且 主体架上还固定连接有限位结构;所述主体架上通过螺栓固定连接有电动伸缩杆,且电动 伸缩杆头端与捕捞结构固定连接;当齿轮套与限位杆触碰后,且电动伸缩杆继续带动捕捞 架向上移动时此时齿排跟随捕捞架向上移动,且此时弹性件为弹性压缩状态,且此时捕捞 臂始终处于90度翘起状态;当电动伸缩杆推动捕捞架向下移动时,齿排和捕捞架同步向下 移动,且当齿排触碰滑动座的内壁底端面时,此时捕捞臂限位解除,捕捞臂受自身重力原因 自动切换至垂直状态;所述主体架上还插接安装有收集结构。 进一步的,所述气垫船主体包括驱动螺旋桨和收集臂,所述气垫船主体上安装有 两个驱动螺旋桨,且气垫船主体上还通过螺栓固定连接有两个收集臂,并且两个收集臂呈 “八”字状设置。 进一步的,所述主体架包括滑动槽,所述主体架为凹形结构,且主体架内壁开设有 两组每组两条滑动槽;所述捕捞结构包括捕捞架、滑动凸起、捕捞臂、棘齿轮、齿轮套和拨 杆,所述捕捞架为凹形结构,且捕捞架顶端面与电动伸缩杆的头端固定连接;所述捕捞架外 壁对称焊接有两组每组两条滑动凸起,且捕捞架通过滑动凸起滑动连接在滑动槽内;捕捞 臂共设有两个,且两个捕捞臂上均焊接有转轴,且两个捕捞臂均通过转动转动连接在捕捞 架上;所述捕捞臂转轴上焊接有棘齿轮,且捕捞臂转轴上还限位转动连接有齿轮套;所述齿 轮套上转动连接有拨杆,且拨杆与棘齿轮啮合,并且棘齿轮、齿轮套和拨杆共同组成棘轮结 构。 进一步的,所述限位结构包括滑动座、滑动杆、齿排和弹性件,所述滑动座共设有 两个且两个滑动座均焊接在主体架内壁,并且两个滑动座内均焊接有滑动杆;每根所述滑 动杆上均滑动连接有一个齿排,且每根滑动杆外壁位于齿排上方位置均套接有一个弹性 件;所述齿排与齿轮套啮合,且弹性件的弹性伸张力大于捕捞臂转动时的扭力,当电动伸缩 杆带动捕捞架向上移动时,此时在齿排的啮合作用下捕捞臂呈翘起状态。 进一步的,所述限位结构还包括限位杆,所述齿排上焊接有限位杆,当齿轮套在与 齿排啮合转动过程中与限位杆触碰时齿轮套为限位状态,且当齿轮套与限位杆触碰时此时 捕捞臂翘起角度为90度。 进一步的,所述收集结构包括收集框、分类板、进料孔A、进料孔B、进料孔C和收集 盒,所述收集框插接再装在主体架上,且收集框前端面焊接有一个分类板,并且收集框内滑 动插接有三个收集盒;所述分类板前端面从下至上依次开设有两组进料孔A、两组进料孔B 和两组进料孔C,且进料孔A、进料孔B和进料孔C均为矩形孔状结构;所述进料孔A、进料孔B 和进料孔C的边长分别为5cm、10cm和15cm,且进料孔A、进料孔B和进料孔C分别与三个收集 盒相互对正。 进一步的,所述分类板前端面与捕捞臂接触,且捕捞臂顶端面为前高后低的倾斜 状结构。 与现有技术相比,本发明具有如下有益效果: 改进了捕捞结构,通过改进可通过一个电动伸缩杆实现捕捞架的上下移动,且还 能够联动实现捕捞臂的展开和合并,并且能够实现捕捞臂的转动至水平、上升区分卸料、向 下移动、捕捞臂转动下垂,进入水面,具体如下:第一,因捕捞臂转轴上焊接有棘齿轮,且捕 捞臂转轴上还限位转动连接有齿轮套;齿轮套上转动连接有拨杆,且拨杆与棘齿轮啮合,并 5 CN 111608150 A 说 明 书 3/5 页 且棘齿轮、齿轮套和拨杆共同组成棘轮结构,从而可实现捕捞臂的单向转动;第二,因齿排 与齿轮套啮合,且弹性件的弹性伸张力大于捕捞臂转动时的扭力,当电动伸缩杆带动捕捞 架向上移动时,此时在齿排的啮合作用下捕捞臂呈翘起状态,从而实现了漂浮物的捕捞;第 三,因齿排上焊接有限位杆,当齿轮套在与齿排啮合转动过程中与限位杆触碰时齿轮套为 限位状态,且当齿轮套与限位杆触碰时此时捕捞臂翘起角度为90度;第四,因当齿轮套与限 位杆触碰后,且电动伸缩杆继续带动捕捞架向上移动时,此时齿排跟随捕捞架向上移动,且 此时弹性件为弹性压缩状态,且此时捕捞臂始终处于90度翘起状态;第五,当电动伸缩杆推 动捕捞架向下移动时,齿排和捕捞架同步向下移动,且当齿排触碰滑动座的内壁底端面时, 此时捕捞臂限位解除,捕捞臂受自身重力原因自动切换至垂直状态,最后通过捕捞架的继 续下移实现捕捞臂的扎入水面。 改进了收集结构,通过改进以及与捕捞结构的配合可实现不同大小漂浮物的分类 收集,具体如下:第一,因分类板前端面从下至上依次开设有两组进料孔A、两组进料孔B和 两组进料孔C,且进料孔A、进料孔B和进料孔C均为矩形孔状结构;进料孔A、进料孔B和进料 孔C的边长分别为5cm、10cm和15cm,且进料孔A、进料孔B和进料孔C分别与三个收集盒相互 对正,从而可实现分类收集;第二,因分类板前端面与捕捞臂接触,且捕捞臂顶端面为前高 后低的倾斜状结构,从而在捕捞臂向上滑动时漂浮物可自动滑入三个收集盒内。 通过收集臂的设置,因气垫船主体上还通过螺栓固定连接有两个收集臂,并且两 个收集臂呈“八”字状设置,从而可实现漂浮物的汇集。 附图说明 图1是本发明的轴视结构示意图。 图2是本发明的主视结构示意图。 图3是本发明去除气垫船主体后的轴视结构示意图。 图4是本发明图3的A处放大结构示意图。 图5是本发明图3的B处放大结构示意图。 图6是本发明收集结构的轴视拆分结构示意图。 图7是本发明图3使用过程中的轴视结构示意图。 图8是本发明图7的C处放大结构示意图。 图9是本发明捕捞结构的轴视结构示意图。 图中,部件名称与附图编号的对应关系为: 1、气垫船主体;101、驱动螺旋桨;102、收集臂;2、主体架;201、滑动槽;3、捕捞结 构;301、捕捞架;30101、滑动凸起;302、捕捞臂;303、棘齿轮;304、齿轮套;305、拨杆;4、限位 结构;401、滑动座;402、滑动杆;403、齿排;404、限位杆;405、弹性件;5、电动伸缩杆;6、收集 结构;601、收集框;602、分类板;60201、进料孔A;60202、进料孔B;60203、进料孔C;603、收集 盒。











