
技术摘要:
本发明涉及一种钢轨车辆(2),该钢轨车辆具有车架(12),该车架(12)支撑在轨上行走机构(4)上并且能够在轨道(1)的钢轨(7)上移动,该钢轨车辆包括第一测量平台(5),该第一测量平台具有用于记录轨道路线的第一惯性测量系统(9)。在钢轨车辆(2)上布置有第二测量平台(14),该第 全部
背景技术:
为了可靠地对轨道上部结构(Gleisoberbaus)进行维护,需要进行定期检查。在这 个过程中使用轨道测量车辆,该轨道测量车辆被设计用于记录轨道区段的当前轨道几何形 状。基于所收集的测量数据规划并执行维护措施。使用各种传感器作为测量装置,以对轨道 本身以及轨道周围环境进行记录。例如借助于布置在轨道测量车辆上的相机系统对轨道以 及轨道周围环境进行记录。 为了确定轨道路线或轨道相对位置,现代轨道测量车辆使用所谓的惯性测量系统 (I n e r t i a l M e a s u r e m e n t U n i t ,I M U) 。这样的惯性测量系统在行业杂志 Eisenbahningenieur(52)9/2001第6-9页上有描述。DE 10 2008 062 143 B3也描述了用于 记录轨道位置的惯性测量原理。
技术实现要素:
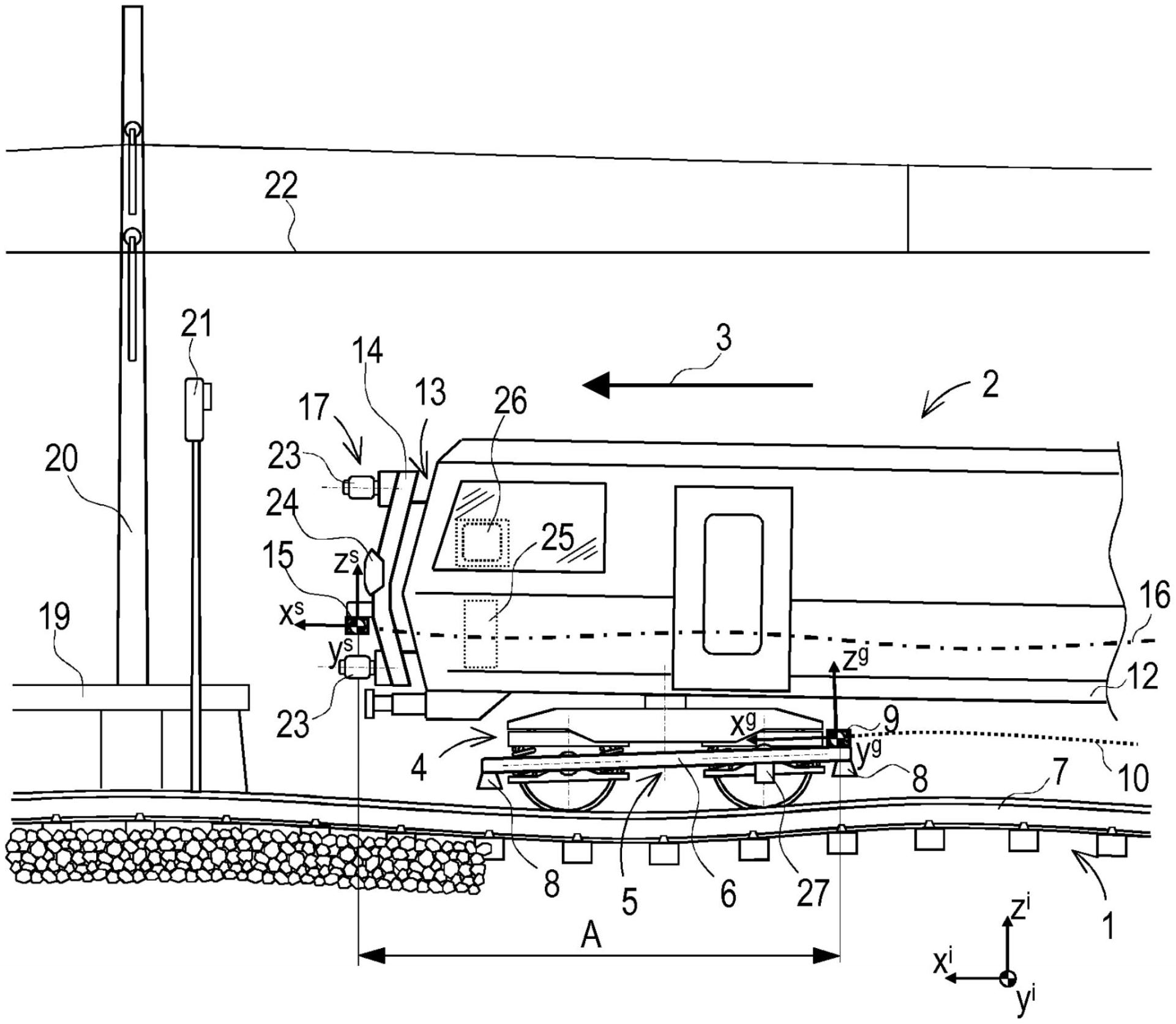
本发明的目的是示出对于开始所述类型的钢轨车辆和方法的现有技术进行的改 进。 根据本发明,这些目的是通过权利要求1和9的特征实现的。根据从属权利要求,本 发明的其他有利改进变得显而易见。 在此,在钢轨车辆上布置有第二测量平台,该第二测量平台包括第二惯性测量系 统和至少一个用于记录轨道区段的表面点的传感器装置。借助于第二测量平台和第二惯性 测量系统,以简单的方式记录传感器装置在三维空间中的移动。通过这种方式,可以在空间 上精确地分配由传感器装置记录的测量数据。 有利地,在钢轨车辆上直接布置有计算机,惯性测量系统和传感器装置的测量数 据被提供到该计算机,并且该计算机被设计用于将表面点的坐标从第二测量平台的与传感 器装置一起移动的坐标系变换到第一测量平台的跟随轨道路线的坐标系中。结果,由传感 器装置记录的表面点与轨道路线相关。因此,可以立即对所记录的对象相对于轨道路线的 位置进行说明。 在进一步的改进中,在钢轨车辆上布置有评估装置,该评估装置被设计用于将表 面点的在第一测量平台的坐标系中的坐标与轨道区段的预定限界轮廓进行比较。 根据本发明的一个有利的实施例,第一测量平台布置在轨上行走机构中的一个轨 上行走机构上。这允许借助于第一惯性测量系统简单地记录轨道路线。 在此,有利地,第一测量平台具有测量框架,该测量框架布置在轨上行走机构的轮 3 CN 111587202 A 说 明 书 2/4 页 轴上,第一惯性测量系统布置在该测量框架上。因此,第一惯性测量系统在三维空间中的运 动仍然不受轨上行走机构的弹性相对运动的影响。可以直接记录轨道的纵向倾斜度。 为了补偿轨上行走机构的横向运动或摆动运动的影响,有利地,在测量框架上布 置至少两个位置测量装置,所述位置测量装置用于确定测量框架相对于轨道的钢轨的位 置。由此,可以连续记录测量框架相对于钢轨的精确位置,并在借助于第一惯性测量系统确 定轨道路线时,将所记录的位置纳入考虑之中。 在本发明的有利的实施例中,第二测量平台布置在钢轨车辆的前侧处。以这种方 式,仅利用几个传感器就可以对钢轨车辆的广阔周围区域进行记录。 另外,有利地,传感器装置包括激光扫描仪,所述激光扫描仪用于将表面点记录为 点云。借助于这种传感器,能够实现以高分辨率对轨道表面及其周围环境的精确记录。在 此,冗余或辅助式旋转扫描仪和行扫描仪可以提高测量数据的精度和质量。 在根据本发明的用于借助于上述钢轨车辆测量轨道区段的方法中,借助于第一惯 性测量系统记录轨道路线,所述轨道路线特别是作为第一测量平台的坐标系的运动路线; 借助于第二惯性测量系统记录传感器装置的运动路线,所述运动路线特别是作为第二测量 平台的坐标系的运动路线;以及借助于传感器装置记录轨道区段的表面点。 在该方法的进一步改进中,将表面点的坐标从第二测量平台的与传感器装置一起 移动的坐标系变换到第一测量平台的跟随轨道路线的坐标系中。这可以借助于钢轨车辆上 携带的计算机在线进行,也可以在远程系统中心离线进行。 在一个有利的附加方法步骤中,将表面点的在第一测量平台的坐标系中的坐标与 轨道区段的限界轮廓()进行比较。以这种方式,可以自动识别与限界轮廓不符的情况。 在 此 ,有 利 地 ,在 输 出 装 置 中 显 示 表 面 点 的 限 界 轮 廓 越 界 (Lichtraumprofilverletzungen)。这可以直接在钢轨车辆中进行,也可以在系统中心进 行,以防发生危险情况。 附图说明 下面将结合附图以示例的方式对本发明进行描述。在附图中示意地示出了: 图1示出了位于轨道上的钢轨车辆; 图2示出了坐标变换; 图3示出了在进入弯道时的记录情况;并且 图4示出了在坐标变换的情况下根据图3的记录情况。











