
技术摘要:
本发明涉及一种模块化机器人面向外部碰撞的分散控制方法及系统,包括:确定基于谐波传动装置柔度与摩擦的模型的力矩;针对机器人中每个模块子系统建立动力学模型;基于动力学模型通过状态空间表达式进行解耦分离不确定性,得到解耦分离后的状态空间表达式;对解耦分离 全部
背景技术:
模块化机器人由具有统一标准的接口的关节模块构成,这些模块可以根据不同的 工作环境与任务自由添加和删除模块组合成不同的构形,并且不需要调整机器人其它模块 的控制参数。由于构形灵活组装方便等优点,模块化机器人经常被应用于太空探测、灾害救 援、高低温等危险与不确定的环境作业。因此,机器人系统将不可避免地受到不确定环境的 影响。所以,需要一个合适的控制系统来保证模块化机器人面对外部碰撞时的鲁棒性和准 确性。 除了模块化的特性外,为了实现高精度的机器人控制,机器人在随机延迟、输入死 区、输入饱和、视觉伺服等条件下的控制问题也是很常见的。此外,关节力矩反馈技术作为 提高机器人控制精度的有效途径,也受到机器人界的广泛关注。使用关节力矩传感器有许 多缺点,这可能会削弱机器人的鲁棒性、可靠性和简单性。为了避免这些问题,本发明提出 了一种基于谐波传动模型的力矩估计方法。 基于模块化的设计思想,模块化机器人的组成模块被设计成了具有标准化的机械 和电气接口,以便于不同模块之间的自由组装和通讯,理想的模块化机器人不光在机械结 构上满足模块化的特点,在控制器上也应该是模块化的,即各机器人模块都由自己的控制 系统,并且相互独立,每个模块控制子系统的工作不受其他模块的控制子系统影响,而且在 机器人的构形发生变化时,控制系统也能够自行调整控制参数,适应机器人的构形变化。基 于这种需求分散控制作为一种先进的控制策略被广泛应用于模块化机器人控制系统的设 计当中。在仅采用局部关节模块动力学信息的条件下,分散控制策略能够为机器人系统提 供结构上的柔性,可以使各个关节模块重组成多种机器人构形以满足不同工作环境下的任 务需求,且无需对其控制参数进行重新调整。 本发明针对一类模块化机器人系统,提出了一种基于力矩估计的模块化机器人面 向外部碰撞的分散控制方法,与传统的采用力矩传感器方法不同的是,本发明通过对谐波 传动装置进行建模,对关节力矩反馈值进行估计。同时,本发明将自适应动态碰撞补偿的思 想加入到分散控制之中,能够在一个较大力度碰撞发生的情况下,让系统尽快的回到期望 的轨迹,并且保证了力矩在其额定的范围之中,从而不影响系统的正常工作。
技术实现要素:
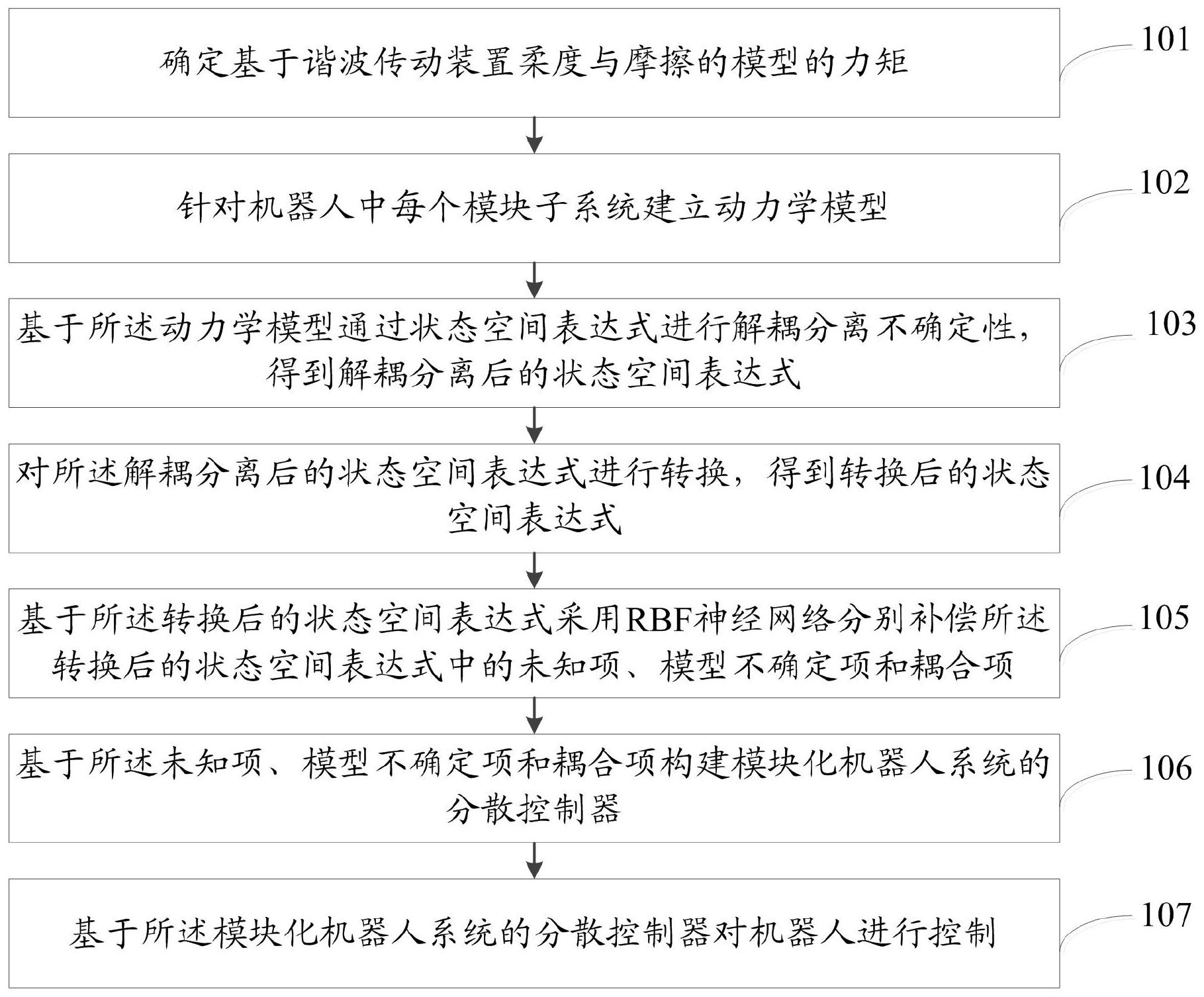
本发明的目的是提供一种模块化机器人面向外部碰撞的分散控制方法及系统,能 够在一个较大力度碰撞发生的情况下,让系统尽快的回到期望的轨迹,并且保证力矩在其 额定的范围之中,不影响系统的正常工作。 为实现上述目的,本发明提供了如下方案: 6 CN 111730594 A 说 明 书 2/16 页 一种模块化机器人面向外部碰撞的分散控制方法,所述控制方法包括: 确定基于谐波传动装置柔度与摩擦的模型的关节力矩; 针对机器人中每个模块子系统建立动力学模型; 基于所述动力学模型通过状态空间表达式进行解耦分离不确定性,得到解耦分离 后的状态空间表达式; 对所述解耦分离后的状态空间表达式进行转换,得到转换后的状态空间表达式; 基于所述转换后的状态空间表达式采用RBF神经网络分别补偿所述转换后的状态 空间表达式中的未知项、模型不确定项和耦合项; 基于所述未知项、模型不确定项和耦合项构建模块化机器人系统的分散控制器; 基于所述模块化机器人系统的分散控制器对机器人进行控制。 可选的,所述确定基于谐波传动装置柔度与摩擦的模型的力矩具体采用以下公 式: τfi=τfci-τupi 其中,τfci为关节力矩估计的确定部分;τupi为力矩输出扰动,是建模的不确定项; τwi为波发生器力矩,等于电动机的力矩;τfi为柔轮的输出力矩,cfi、kfi0、cwi以及kwi0为待定 常数,γi为谐波传动装置的减速比。 可选的,所述针对机器人中每个模块子系统建立动力学模型具体采用以下公式: 其中,角标“i”表示第i个子系统,Imi为电动机转动惯量,γi代表齿轮的减速比; 分别表示第i个关节的位置,速度和加速度;τi为控制力矩, 为谐波装置的 集中摩擦力和电动机的摩擦力,表达式如下: 其中, 表示依赖位置的摩擦力和其它由于建模误差导致的摩擦力, 表示摩擦力矩的参数不确定性, 表示速度 依赖的摩擦矩阵, 和 代表摩擦力参数的估计值; 为速度和加速度的非 线性函数,表达式如下: 其中, 表示常数变量参数, 表示时间变量参数。 可选的,基于所述动力学模型通过状态空间表达式进行解耦分离不确定性,得到 解耦分离后的状态空间表达式具体采用以下公式: 7 CN 111730594 A 说 明 书 3/16 页 其中,B =(I γ )-1i mi i ∈R 表示, 和 代表摩擦力参数的估计值, 表示依赖位置的摩擦力和其它由于建模误差导致的摩擦力。 速度依赖的摩擦矩阵, 表示摩擦力矩的参数不确定性, 表示常数变 量参数, 表示时间变量参数,di(qi)为扰动力矩项。 可选的,对所述解耦分离后的状态空间表达式进行转换,得到转换后的状态空间 表达式具体包括: 定义系统的状态向量 和控制输入ui=τi∈R1×1,i= 1,2,...,n,第i个关节子系统的状态空间方程表示为: 其中, 表示子系统动力学中精确 建模和可测量的部分, 表示整个模型不确定性,包括摩擦力模型误差和 外部不确定干扰。 可选的,所述基于所述转换后的状态空间表达式采用RBF神经网络分别补偿所述 转换后的状态空间表达式中的未知项、模型不确定项和耦合项具体包括: 构建鲁棒神经网络分散控制器; 基于所述鲁棒神经网络分散控制器补偿所述转换后的状态空间表达式中的未知 项、模型不确定项和耦合项。 可选的,所述基于所述未知项、模型不确定项和耦合项构建模块化机器人系统的 分散控制器具体采用以下公式: 8 CN 111730594 A 说 明 书 4/16 页 其中,τi表示控制力拒,τfci为关节力矩估计的确定部分,γi为谐波传动装置的减 速比,uic1用于补偿系统精确建模的部分,uir2为一个鲁棒控制项用来补偿摩擦力建模的不 确定部分和对外界碰撞的补偿,uin3为神经网络控制项,Imi表示电动机转动惯量,ai表示加 速度误差, 表示第i个关节的速度, 和 代表摩擦力参数的估计值, 被设计用 于补偿非参数不确定性, 和 分别用来补偿参数不确定项, 为神经网络理想权值Wzi 的估计值,Φzi(|ri|)为神经网络的基函数。 本发明另外提供一种模块化机器人面向外部碰撞的分散控制系统,所述控制系统 包括: 力矩估计模块,用于确定基于谐波传动装置柔度与摩擦的模型的力矩; 动力学模型建立模块,用于针对机器人中每个模块子系统建立动力学模型; 解耦分离模块,用于基于所述动力学模型通过状态空间表达式进行解耦分离不确 定性,得到解耦分离后的状态空间表达式; 转换模块,用于对所述解耦分离后的状态空间表达式进行转换,得到转换后的状 态空间表达式; 补偿模块,用于基于所述转换后的状态空间表达式采用RBF神经网络分别补偿所 述转换后的状态空间表达式中的未知项、模型不确定项和耦合项; 分散控制器构建模块,用于基于所述未知项、模型不确定项和耦合项构建模块化 机器人系统的分散控制器; 执行模块,用于基于所述模块化机器人系统的分散控制器对机器人进行控制。 可选的,所述力矩估计模块具体采用以下公式: τfi=τfci-τupi 其中,τfci为关节力矩估计的确定部分;τupi为力矩输出扰动,是建模的不确定项; τwi为波发生器力矩,等于电动机的力矩;τfi为柔轮的输出力矩,cfi,kfi0,cwi以及kwi0为待定 常数,γi为减速比。 可选的,所述动力学模型建立模块具体采用以下公式: 其中,角标“i”表示第i个子系统,Imi为电动机转动惯量,γi代表齿轮的减速比; 9 CN 111730594 A 说 明 书 5/16 页 分别表示第i个关节的位置,速度和加速度;τi为控制力矩, 为谐波装置的 集中摩擦力和电动机的摩擦力,表达式如下: 其中,bfi、fci、fsi和fτi为摩擦力模型的参数, 表示依赖位置的摩擦力和其 它由于建模误差导致的摩擦力; 为速度和加速度的非线性函数,表达式如下: 其中,zmi,zqj。zqk分别为沿着第i,j,k关节转动轴的单位向量,τfci是关节力矩估计 值,di(qi)为扰动力矩项, 为第i关节转动轴的单位转置向量, 和 分别表示第k,j个 关节的速度。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 本发明通过对谐波传动装置进行建模,对关节力矩反馈值进行估计。同时,本发明 将自适应动态碰撞补偿的思想加入到分散控制之中,能够在一个较大力度碰撞发生的情况 下,让系统尽快的回到期望的轨迹,并且保证了力矩在其额定的范围之中,从而不影响系统 的正常工作。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明实施例一种模块化机器人面向外部碰撞的分散控制方法流程图; 图2为本发明实施例模块化机器人结构示意图; 图3为本发明实施例谐波传动装置结构图; 图4为本发明实施例谐波传动运动学关系示意图; 图5为本发明中实施例基于柔度的谐波传动运动学关系示意图; 图6为本发明中实施例考虑波发生器与柔轮柔度的运动学关系示意图; 图7为本发明实施例模块化机器人关节内部运动学关系示意图; 图8为本发明实施例验证本发明有效性的实验装置; 图9为本发明实施例实验关机1和关节2快速运动的力矩估计偏差曲线; 图10为本发明实施例实验关机1和关节2快速运动控制力矩曲线; 图11为本发明实施例实验关机1和关节2快速运动关节位置误差曲线; 图12为本发明实施例实验关机1和关节2慢速运动的力矩估计偏差曲线; 图13为本发明实施例实验关机1和关节2慢速运动控制力矩曲线; 图14为本发明实施例实验关机1和关节2慢速运动关节位置误差曲线; 图15为本发明实施例一种模块化机器人面向外部碰撞的分散控制系统结构示意 图。 10 CN 111730594 A 说 明 书 6/16 页











