
技术摘要:
本发明涉及焊接机构的技术领域,尤其是指一种纽扣接点自动焊接机构,包括支架,支架设有焊接装置、输送装置以及推料装置;焊接装置包括上电极、下电极、电极座和第一驱动件;输送装置包括传动弯折杆、打杆、复位弹簧、第二驱动件、夹子、半圆形齿轮和滑座,支架设有转 全部
背景技术:
纽扣接点属于平板触点,纽扣触点的体积小,加工的数量多。传统的方式需要人手 进行送料和焊接,生产效率低下,这样不能满足大批量的生产需求。现有的方式通过焊接设 备进行点焊接加工,但是现有的焊接设备的焊接定位比较困难,因此,上述技术问题亟待解 决。
技术实现要素:
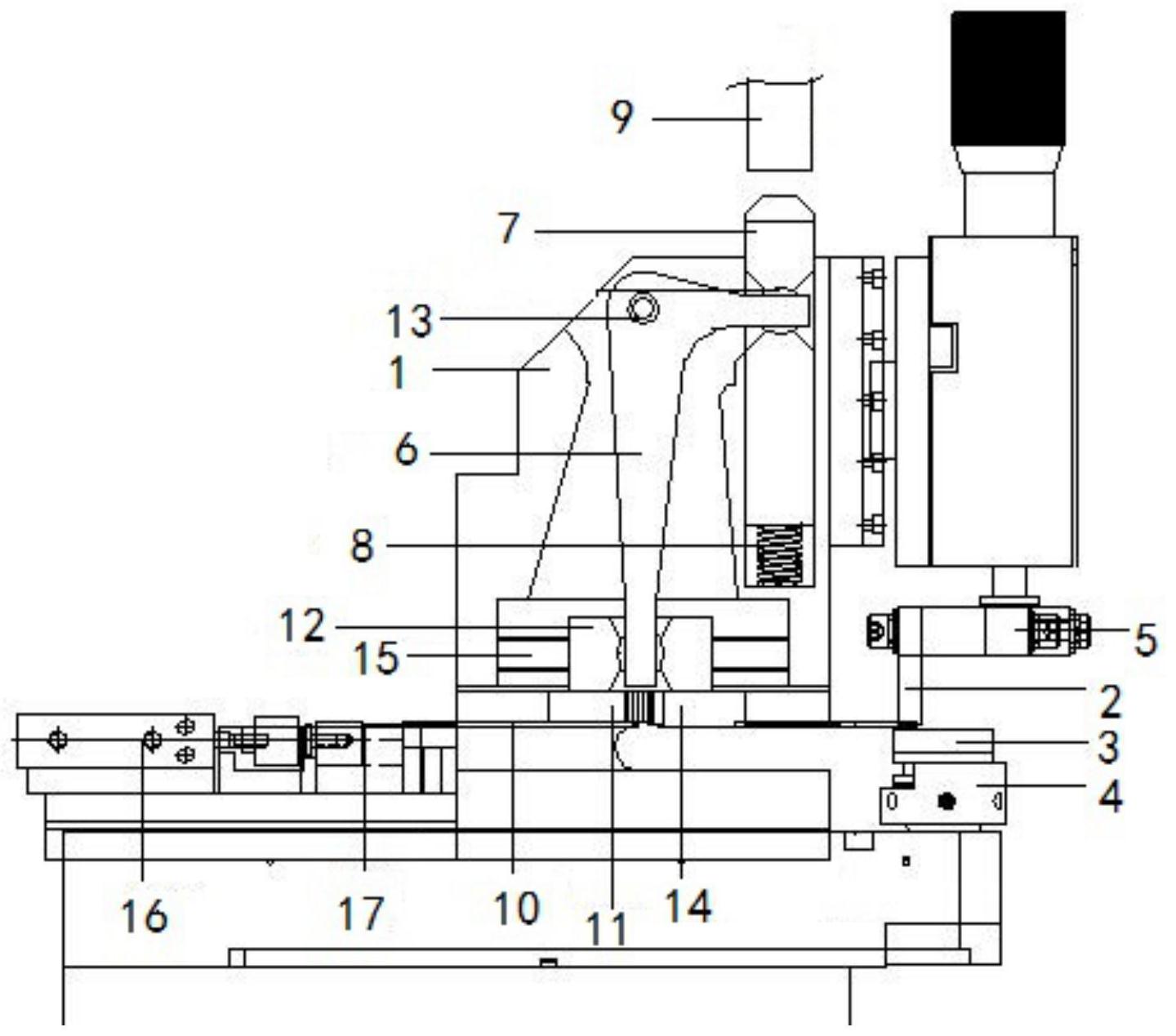
本发明针对现有技术的问题提供一种纽扣接点自动焊接机构。 为了解决上述技术问题,本发明采用如下技术方案:一种纽扣接点自动焊接机构, 包括支架,支架设有用于对纽扣接点进行焊接的焊接装置、用于将纽扣接点转移到焊接装 置的输送装置以及用于将纽扣接点推送到输送装置的推料装置;焊接装置包括上电极、下 电极、用于安装下电极的电极座和用于驱动上电极升降动作的第一驱动件;输送装置包括 传动弯折杆、打杆、复位弹簧、用于驱动打杆升降动作的第二驱动件、用于夹紧纽扣接点的 夹子、用于带动夹子动作的半圆形齿轮和用于驱动半圆形齿轮往复移动的滑座,支架设有 转轴,传动弯折杆设有用于与转轴转动连接的轴孔,传动弯折杆的一端与打杆连接,打杆通 过复位弹簧与支架连接,传动弯折杆的另一端与滑座连接,滑座与支架滑动连接,支架设有 用于与半圆形齿轮啮合实现转动动作的齿条;推料装置包括用于将纽扣接点推动至夹子处 的推块和用于驱动推块伸缩往复动作的第三驱动件。 进一步的,纽扣接点自动焊接机构还包括用于将纽扣接点排队传送至推块前的振 动盘。 进一步的,支架设有用于方便滑座按规定方向往复滑动的轨道。 进一步的,传动弯折杆的形状呈L形。 进一步的,支架设有用于驱动夹子动作的第四驱动件。 进一步的,第一驱动件、第二驱动件和第三驱动件均为气缸。 进一步的,第四驱动件为电机。 本发明的有益效果:本发明结构简单,对批量的纽扣接点依次进行推料、输送和焊 接的自动往复动作,方便焊接定位,自动化程度高,生产效率高。 附图说明 图1为本发明的正视图。 图2为本发明的结构示意图。 附图标记:1、支架;2、上电极;3、下电极;4、电极座;5、第一驱动件;6、传动弯折杆; 7、打杆;8、复位弹簧;9、第二驱动件;10、夹子;11、半圆形齿轮;12、滑座;13、转轴;14、齿条; 3 CN 111590184 A 说 明 书 2/3 页 15、轨道;16、第三驱动件;17、推块。











