
技术摘要:
本发明公开了一种双面阵CCD辅助三线阵CCD位姿光学测量及校准方法。步骤1:器材准备,确定合作目标,采用三个红色LED光点作为合作目标;步骤2:测量仪器安装;步骤3:柱面镜镜头设计,线阵CCD相机镜头采用柱面镜和滤光片组成;步骤4:进行测量,通过快速捕捉过程、粗调 全部
背景技术:
基于电荷耦合器件(Charge-coupled Device—CCD)相机,依据几何光学测量原 理,采用前方交会对接和坐标变换等视觉测量技术,是当今对飞行物体进行姿态测量中较 为常见的方法。该项技术使用的测量仪器CCD相机具有结构简单、非接触、精度高、实时性强 等优点,相较于面阵CCD,线阵CCD具有更高的分辨率及更高的采样速度,其数据量更小,易 于实现实时位姿测量。因而由若干线阵CCD和面阵CCD组构成的测量系统兼备方法便捷、精 度高、可移植性强等特点,在大视场、非接触的空间目标体位姿测量和坐标标定领域具有一 席之地。 然而基于线阵CCD的测量技术大多采用线扫结构,独立用于位姿测量的场合较为 少。飞行物体进行姿态测量过程中,对镜头的景深要求有较大的提高。随着线阵和面阵CCD 相机的工艺、集成度、材料和控制电路的发展,其分辨率、帧频、饱和度和曝光时间等参数都 有大幅度的优化和提升,因此测量系统的指标对光学系统设计、镜片及机械加工、系统装调 提出了越来越高的要求。由于线阵CCD只有单方向像素,当应用于空间目标坐标测量时,无 法像面阵CCD那样使用普通球面镜组成的通用镜头,而柱面镜具有将点成像化为线成像的 特性,可以有效减小球差和色差,特别适合于配合线阵CCD进行飞行物体的空间位置测量。
技术实现要素:
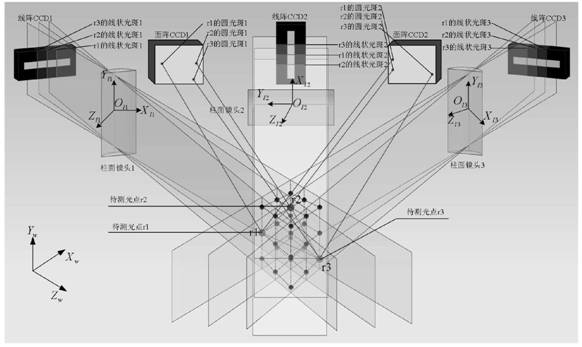
线阵CCD单向维度的分辨力高,有利于提高测量精度;面阵CCD具有二维视场,成像 快,有利于捕捉动态目标的特性;本发明提供一种双面阵CCD辅助三线阵CCD位姿光学测量 及校准方法,基于像方远心光路的光学镜头,不仅满足系统大视场、大景深、低畸变的要求, 而且采用双面阵CCD辅助三线阵CCD完成测量系统的构建,根据这一系统设计新测量方法从 而实现物体位姿高精度测量与坐标标定。 本发明通过以下技术方案实现: 一种双面阵CCD辅助三线阵CCD位姿光学测量方法,所述测量方法包括以下步骤: 步骤1:器材准备,确定合作目标,采用三个红色LED光点作为合作目标; 步骤2:测量仪器安装,两侧线阵CCD1、CCD3相对合作目标水平放置,中间线阵CCD2 相对合作目标竖直放置,两面阵CCD1、CCD2与三线阵CCD间隔放置,五台相机同处于一条水 平线,并且等距放置; 步骤3:柱面镜镜头设计,线阵CCD相机镜头采用7片柱面镜和1片635nm滤光片组 成; 步骤4:进行测量,通过快速捕捉过程、粗调计算过程、精调计算过程和校准过程直 至获得精调坐标数据。 4 CN 111595302 A 说 明 书 2/5 页 进一步的,所述步骤1中的器材包括线阵CCD相机、线阵CCD相机镜头、面阵CCD相机 和面阵CCD镜头。 进一步的,所述步骤2测量仪器安装为,两侧柱面镜头与线阵CCD1、CCD3垂直,中间 柱面镜头与线阵CCD2水平,LED光点经过柱面镜头成像为一直线,所成直线像与线阵CCD垂 直相交,光点与像线构成一个平面,像点即为平面与线阵CCD交点,每个光点经过镜头所成 像分别与三个线阵CCD垂直相交,得出三个平面方程,三个平面的交点即为发光的LED点,联 立三个平面方程可解算出光点的空间位置坐标,从而计算得到线阵CCD解算得到的标志光 点空间坐标为r1(xl1,yl1,zl1)、r2(xl2,yl2,zl2)、r3(xl3,yl3,zl3)。 进一步的,所述步骤3的柱面镜镜头设计,由于采用三个红色LED光点作为合作目 标,因此在线阵CCD相机镜头最后一级柱面镜加装红色滤光片,采用像方远心光路设计,使 景深范围内会聚的光斑能量中心位置在垂直于光轴的方向不产生变化,用于消除点光斑物 距变化带来的测量误差。 进一步的,所述步骤4的快速捕捉过程具体为,两个事先标定好参数的面阵CCD相 机开启连续摄像模式,在调整好的增益、饱和度和曝光时间等参数下,在宽视场范围内迅速 捕捉三个目标光点。 进一步的,所述步骤4的粗调计算过程具体为,根据双目视觉测量原理,获得三个 目标光点的大致位置坐标即粗调坐标r1′(xl1,yl1,zl1)、r2′(xl2,yl2,zl2)、r3′(xl3,yl3,zl3) 进一步的,所述步骤4的精调计算过程具体为,开启三个线阵CCD,分别在三个线阵 CCD上获得线状光斑。 进一步的,所述步骤4的校准过程具体包括以下步骤: 步骤4.1:选取一个参数, 有δx=∣xli-xmi∣≤ε,δy=∣yli-ymi∣≤ε,δz=∣zli- zmi∣≤ε,其中k值的选定取决于相机的分辨率及相机的校准情况,xmi,ymi,zmi为经过坐标机 标定后的光点坐标; 步骤4.2:光点位置空间距离保持不变,将δx,δy,δz作为参数带入三个联立的平面 方程,从而获得由线阵CCD解算得到的标志光点空间坐标为r1(xl1 ,yl1 ,zl1)、r2(xl2 ,yl2 , zl2)、r3(xl3,yl3,zl3),其相互距离分别为l12、l13、l23; 步骤4.3:如果步骤4.2中标志光点空间坐标数据与坐标机标定的坐标数据一致, 则停止校准,否则重复步骤4.1-4.2,直至获得精调坐标数据。 本发明的有益效果是: 1 .本发明的采用7片柱面镜和一片红色滤光片组成像方远心光路,有效消除了像 差,并具有较低的畸变,结果表明,镜头畸变优于0.05%,景深可达1.5米,可配合线阵CCD实 现高精度测试。 2.本发明线阵CCD相机镜头的相对孔径D/f=1/4,因此其入瞳大小D为90.04/4= 22.5mm;镜头中光学材料的中心厚度为4cm,设光学材料的透过率τ=0.999;透镜数量8片, 镀膜后的表面透过率为99.5%;滤光片的透过率为80%,镜头的透过率T为73.5%。 3.本发明从畸变测试数据知,在1m×1m范围内镜头畸变小于0.1%,整体畸变小于 0.3%,即镜头中心视场畸变优于边缘,使用时通过校准可进一步提高测量精度。 5 CN 111595302 A 说 明 书 3/5 页 附图说明 图1本发明的双面阵CCD辅助三线阵CCD测量系统示意图。 图2本发明的柱面镜镜头光学系统结构示意图。 图3本发明的双目视觉原理图。











