
技术摘要:
本发明涉及一种基于卡尔曼滤波的目标序列跟踪图像恢复方法。本发明大体包括三部分内容。第一部分,根据实际目标跟踪的运动状态建立卡尔曼方程组;第二部分,将卡尔曼方程组改进为列向量形式;第三部分,目标序列观测图像融合。利用本发明不仅可以应对单幅受损图像进行 全部
背景技术:
在智能图像处理系统快速发展的过程中,针对目标跟踪图像的增强技术,得到人 们的广泛关注。目标序列跟踪图像是传感器针对一个运动目标进行持续跟踪获得的序列图 像,计算机通过分析这些图像可以获得比人类视觉观测更完善的信息。 图像质量的好坏是计算机处理与决断的重要影响因素,但是图像在成像、传输、存 储过程中不免受到环境噪声、有损压缩、数模转换低的影响,甚至失去应用价值。因此如何 从受损的目标序列跟踪图像中去除噪声、重构出高质量的图像是智能图像处理领域面临的 重要问题之一。 国内外研究者已经提出很多实用的图像增强算法,如卡尔曼滤波算法、均值滤波 算法、小波去噪算法等都可以直接或间接地去除图像信息中噪声的部分影响,这些图像增 强算法的优点是简便可行,但其不足在于对单幅受损图像进行复原所获得的效果有限,当 污染图像的噪声过大或图像发生较大变形时,就难以满足任务对图像质量的需求。 图像融合技术是取同一目标的多幅图像进行融合去噪处理,将多幅受损图像中的 有用信息集中在一幅图像中,利用这些图像信息进行互补和冗余,可以获得更好的效果,但 是这些图像融合技术对于图像的要求较为严苛,即受损图像集不能发生形变。 卡尔曼滤波算法可以去除图像信息中噪声的部分影响,但是当污染图像的噪声过 大或图像发生较大变形时,该算法的效能明显不足。考虑到卡尔曼滤波框架可以融合序列 图像,并且框架下的观测模型可以模拟图像的形变,因此本发明提出了基于卡尔曼滤波的 图像恢复方法。
技术实现要素:
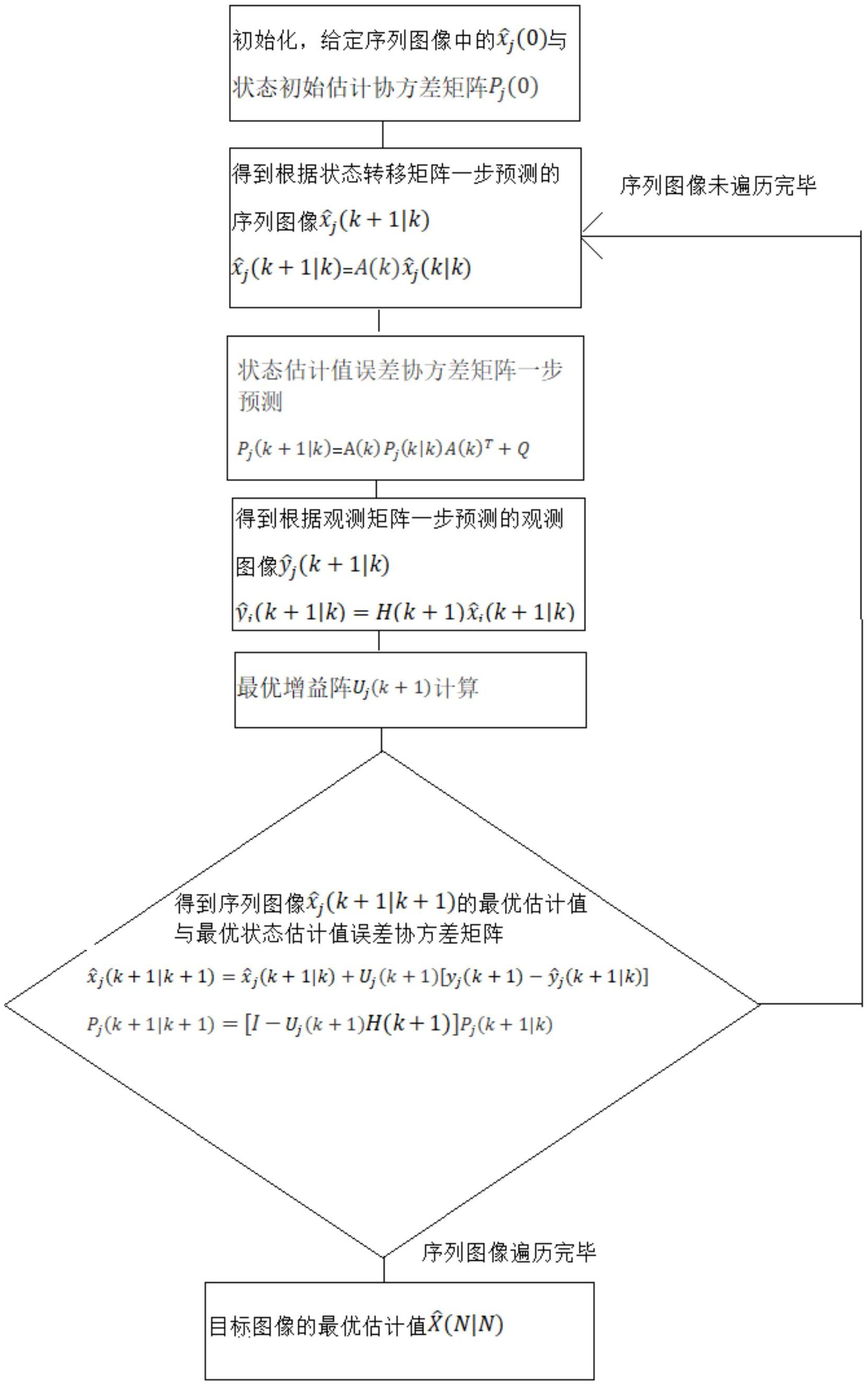
为了解决对单幅受损图像进行复原所获得效果有限的问题与图像融合技术对于 图像要求严苛的问题,本发明提出了一种基于卡尔曼滤波的图像恢复方法。 本发明大体包括三部分内容。第一部分,根据实际目标跟踪的运动状态建立卡尔 曼方程组;第二部分,将卡尔曼方程组改进为列向量形式;第三部分,目标序列观测图像融 合。 利用本发明不仅可以应对单幅受损图像进行复原所获得效果有限的问题,而且能 够解决图像融合技术对于图像要求严苛的问题,包括以下步骤: 步骤1卡尔曼方程组的矩阵形式描述,为利用卡尔曼滤波器融合序列观测图像估 计目标图像,先建立符合卡尔曼滤波框架的系统模型与观测模型。 考虑目标是慢速运动的,将目标的动态模型表示如下 X(k 1)=A(k)X(k) W(k) ,k=0,1,2,…,N (1) 4 CN 111612729 A 说 明 书 2/6 页 上式中,X(k)为第k时刻观测图像对应的目标状态,假设X(0)为目标初始状态的矩 阵,A(k)为其对应状态转移矩阵,W(k)为零均值的高斯白噪声。 结合观测模型 Y(k 1)=H(k 1)X(k 1) V(k 1) ,k=0,1,2,…,N (2) 上式中,Y(k 1)为第k 1时刻的观测图像,H(k 1)为其对应的观测矩阵,V(k 1)为 零均值的高斯白噪声。 步骤2卡尔曼方程组的列向量形式描述,考虑到目前没有基于向量形式的卡尔曼 滤波器,为此将上述矩阵形式下系统方程改写以列向量为基本单位的形式。 X(k)=[x1(k) x2(k) … xj(k) … xn(k)] (3) W(k)=[w1(k) w2(k) … wj(k) … wn(k)] (4) Y(k)=[y1(k) y2(k) … yj(k) … yn(k)] (5) V(k)=[v1(k) v2(k) … vj(k) … vn(k)] (6) 上式中,,xj(k)为第k时刻的目标图像矩阵第j列的像素灰度值,wj(k)为第k时刻的 高斯白噪声矩阵第j列的像素灰度值,yj(k)为第k时刻的观测图像矩阵第j列的像素灰度 值,vj(k)为第k时刻的高斯白噪声矩阵第j列的像素灰度值。 将系统模型与观测模型改写成以列向量为基本单位的形式 xj(k 1)=A(k)xj(k) wj(k) ,k=0,1,2,…,N;j=1,2,…,n (7) yj(k)=H(k)xj(k) vj(k) ,k=0,1,2,…,N;j=1,2,…,n (8) wj(k)~N[0,Q(k)],k=0,1,2,…,N;j=1,2,…,n (9) vj(k)~N[0,R(k)],k=0,1,2,…,N;j=1,2,…,n (10) 步骤3目标序列观测图像融合,具体算法如下: 假设给定状态初始估计值 和状态初始估计协方差矩阵Pj(0),基于前k个观测 值可得目标图像第j列的估计值 与第k时刻状态估计协方差矩阵 步骤3.1状态估计值一步预测方程 步骤3.2状态估计值误差协方差矩阵一步预测方程 步骤3.3测量值一步预测方程 步骤3.4最优增益阵Uj(k 1)计算 U (k 1)=P (k 1|k)H(k 1)T[H(K 1)P (k 1|k)H(k 1)T R]-1j j j (16) 步骤3.5状态估计值和估计误差得到实时更新方程 5 CN 111612729 A 说 明 书 3/6 页 Pj(k 1|k 1)=[I-Uj(k 1)H(k 1)]Pj(k 1|k) (18) 上式中, 步骤3.6基于序列观测图像Y(1)、Y(2),…,Y(N)的卡尔曼滤波融合结果,即目标图 像X的估计值为 其中 上述过程中,j=1,2,…,n。 本发明的有益效果:本发明一方面,通过卡尔曼滤波的原理将多幅受损图像的信 息融合以重构出原始图像,解决了对单幅受损图像进行复原所获得效果有限的问题;另一 方面,通过建立卡尔曼滤波框架下的系统模型和观测模型,模拟目标序列跟踪图像在持续 发生形变时;本发明可以将普通图像融合技术无法处理的受损图像集进行融合以重构出原 始图像,解决了图像融合技术对于图像要求严苛的问题。 附图说明 图1为本发明方法的流程框图。











