
技术摘要:
本发明公开一种空间碎片绳系拖曳离轨目标姿态章动抑制控制方法及系统,属于航天器姿态动力学与控制领域。本发明实现方法为:将碎片目标与绳网组合体采用刚体的假设后,采用刚体旋转运动的欧拉方程建立绳系拖曳系统的动力学模型;分析设计基于对机械能进行耗散的常值张 全部
背景技术:
空间碎片涵盖了火箭上面级、失效卫星、航天任务抛弃物及航天器解体或相互之 间碰撞产生的衍生物等。如2009年美国铱星与俄罗斯卫星的碰撞致使 10cm以上的空间碎 片增加了近3000个,大大增加了在轨航天器的安全风险。 为适应未来故障卫星回收、空间碎片清理等非合作目标捕获任务的需求,国内外 研究机构提出了了一种柔性飞网为捕获手段的柔性捕获模式,其具有量轻、灵活性高和控 制简单等优点,非常适合非合作目标的变轨任务。 绳网捕获目标后,拖船和碎片构成以系绳为连接介质的柔性组合体,拖船通过自 身的平台控制和绳系收放装置控制,实现对碎片的拖曳离轨,并保证在拖曳过程中绳系系 统不发生振荡发散、缠绕等情况。考虑到目标为非合作目标且被包裹时自旋情况不确定,认 为其可能有一定的自旋角速度和一定角度的章动。为保证拖曳过程中不会发生系绳缠绕等 风险,在对目标进行拖曳离轨前,应当对目标的章动角速率进行抑制,减弱拖曳过程中目标 的章动对系统的影响。 现有技术均假设目标能够提供足够的运动状态信息,如目标姿态角速率,抓捕状 态等。而对于空间碎片等非合作目标,现有技术仅能测得其姿态信息,基于当前测量技术的 局限性。
技术实现要素:
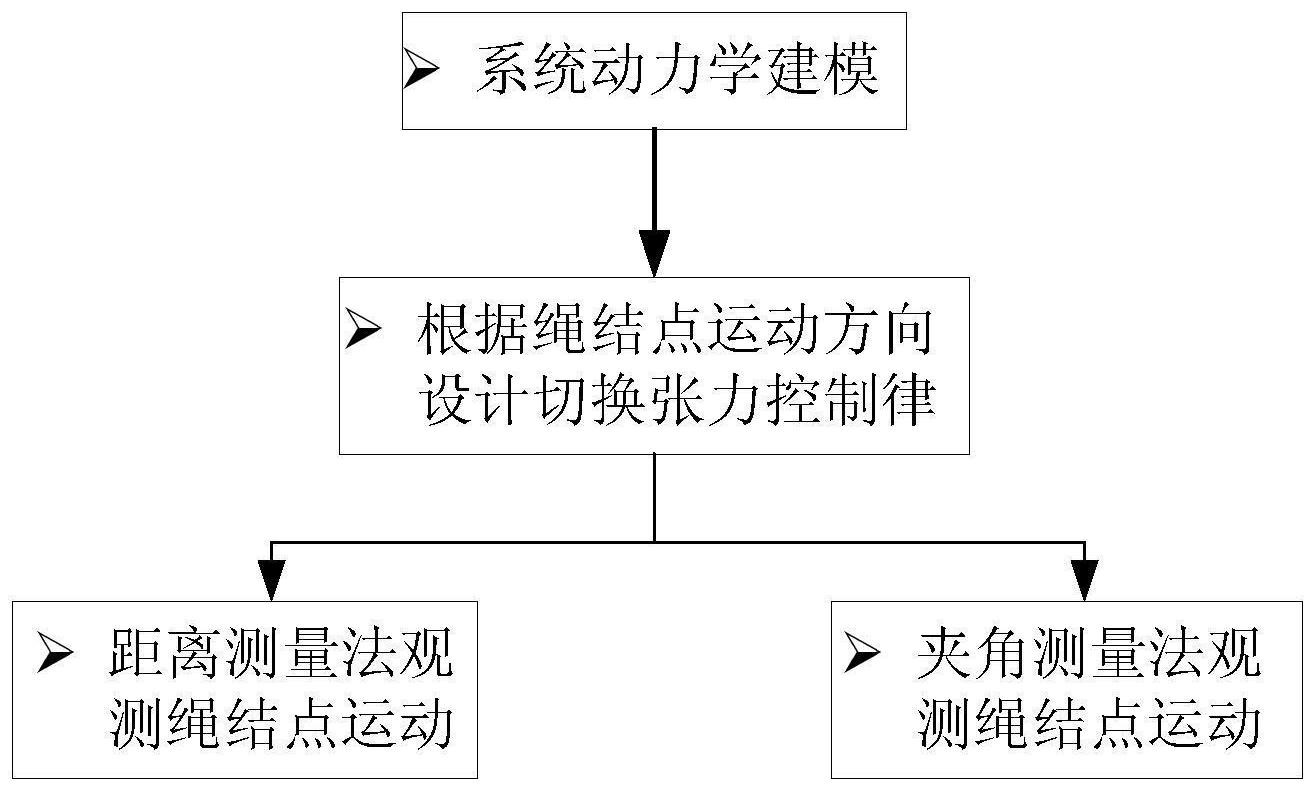
本发明解决的技术问题是:克服现有技术的不足,提供了一种空间碎片绳系拖曳 离轨目标姿态章动抑制控制方法及系统,对碎片目标章动抑制阶段控制方案进行分析和设 计,首先采用碎片目标与绳系组合体为刚体的简化假设,研究组合体的运动物理规律,对控 制方案进行总体设计。 本发明的技术解决方案是:空间碎片绳系拖曳离轨目标姿态章动抑制控制方法, 包括如下步骤: 通过刚体旋转运动的欧拉方程建立绳系拖曳系统的动力学模型;所述绳系拖曳系 统包括拖船航天器,空间碎片和系绳;所述系绳包括主绳和子绳,所述主绳一端连接拖船航 天器,另一端通过绳结点连接子绳;所述子绳有若干条,分别连接空间碎片的对应部位; 根据所述绳系拖曳系统的动力学模型,并基于对机械能进行耗散,获取切换张力 控制律; 对所述绳结点的位置进行观测,将观测到的绳结点位置结合所述切换张力控制律 对主绳的张力进行控制,实现对空间碎片目标姿态章动的控制。 4 CN 111552326 A 说 明 书 2/6 页 进一步地,所述切换张力控制律为 其中,T为系绳的张力, T1为需要维持的绳系张力,ΔT根据经验选取的张力增量,为观测到的绳结点位置。 进一步地,所述对所述绳结点的位置进行观测的方法包括:测量绳结点距离拖船 航天器和空间碎片连线的距离,或者测量主绳的方向与拖船航天器和空间碎片连线的夹 角。 进一步地,所述绳结点的位置为绳结点距离拖船航天器和空间碎片连线的距离 时,对主绳的张力进行控制的方法为:根据 进行控制;其中,r为绳结 点距离拖船航天器和空间碎片连线的距离。 进一步地,所述绳结点的位置为主绳的方向与拖船航天器和空间碎片连线的夹角 时,对主绳的张力进行控制的方法为:根据 进行控制;其中,α为系绳 的主绳的方向与拖船航天器和空间碎片连线的夹角。 空间碎片绳系拖曳离轨目标姿态章动抑制控制系统,包括 第一模块,通过刚体旋转运动的欧拉方程建立绳系拖曳系统的动力学模型;所述 绳系拖曳系统包括拖船航天器,空间碎片和系绳;所述系绳包括主绳和子绳,所述主绳一端 连接拖船航天器,另一端通过绳结点连接子绳;所述子绳有若干条,分别连接空间碎片的对 应部位; 第二模块,根据所述绳系拖曳系统的动力学模型,并基于对机械能进行耗散,获取 切换张力控制律; 第三模块,对所述绳结点的位置进行观测,将观测到的绳结点位置结合所述切换 张力控制律对主绳的张力进行控制,实现对空间碎片目标姿态章动的控制。 进一步地,所述切换张力控制律为 其中,T为系绳的张力, T1为需要维持的绳系张力,ΔT根据经验选取的张力增量,为观测到的绳结点位置。 进一步地,所述对所述绳结点的位置进行观测,具体的的方法包括:测量绳结点距 离拖船航天器和空间碎片连线的距离,或者测量主绳的方向与拖船航天器和空间碎片连线 的夹角。 进一步地,所述绳结点的位置为绳结点距离拖船航天器和空间碎片连线的距离 时,对主绳的张力进行控制的方法为:根据 进行控制;其中,r为绳结 点距离拖船航天器和空间碎片连线的距离。 进一步地,所述绳结点的位置为主绳的方向与拖船航天器和空间碎片连线的夹角 时,对主绳的张力进行控制的方法为:根据 进行控制;其中,α为系绳 5 CN 111552326 A 说 明 书 3/6 页 的主绳的方向与拖船航天器和空间碎片连线的夹角。 本发明与现有技术相比的优点在于: (1)本发明充分考虑到现有的时变张力控制方法对测量设备和执行机构的性能要 求太高,目前难以在工程项目中应用,提出采用常值切换张力控制方法,以一组两个大小不 同的恒定张力抑制碎片目标的姿态章动,具有较强的工程实现性。 (2)本发明充分考虑到空间碎片等非合作目标姿态角速率以及抓捕状态等信息不 易测得,提出测量其他相关量间接地反映绳结点运动的测量方法。 附图说明 图1为本发明的参考系示意图; 图2为本发明的绳结点距离示意图; 图3为本发明的系绳方向与两星之间连线的夹角示意图; 图4为本发明的方法流程图。











