
技术摘要:
本申请实施例公开了一种车辆控制方法,用于无人驾驶车辆。本申请实施例方法包括:获取无人驾驶车辆沿预设路径行驶时的道路信息;依据道路信息判断是否存在与当前道路交叉的未知道路;若存在未知道路,则获取未知道路信息,并判断获取未知道路信息过程是否成功;若成功 全部
背景技术:
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的自动 驾驶系统来实现无人驾驶的目的。无人驾驶汽车利用车载传感器来感知车辆周围环境,并 根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够 安全、可靠地在道路上行驶。 现有的无人驾驶汽车在行程开始时,会依据当前所在位置及目的地所在位置使用 内置于自动驾驶系统的地图生成具体的预设路径,预设路径连接当前所在位置及目的地所 在位置,并且无人驾驶系统一般会选用路途较短或符合无人驾驶汽车需求的路段组成预设 路径。 在无人驾驶汽车实际行驶过程中车辆会实时获取当前道路上的车辆、行人及障碍 物等信息,并依据相应信息进行减速或执行其他驾驶行为,以便于完成预先确定的预设路 径行程。
技术实现要素:
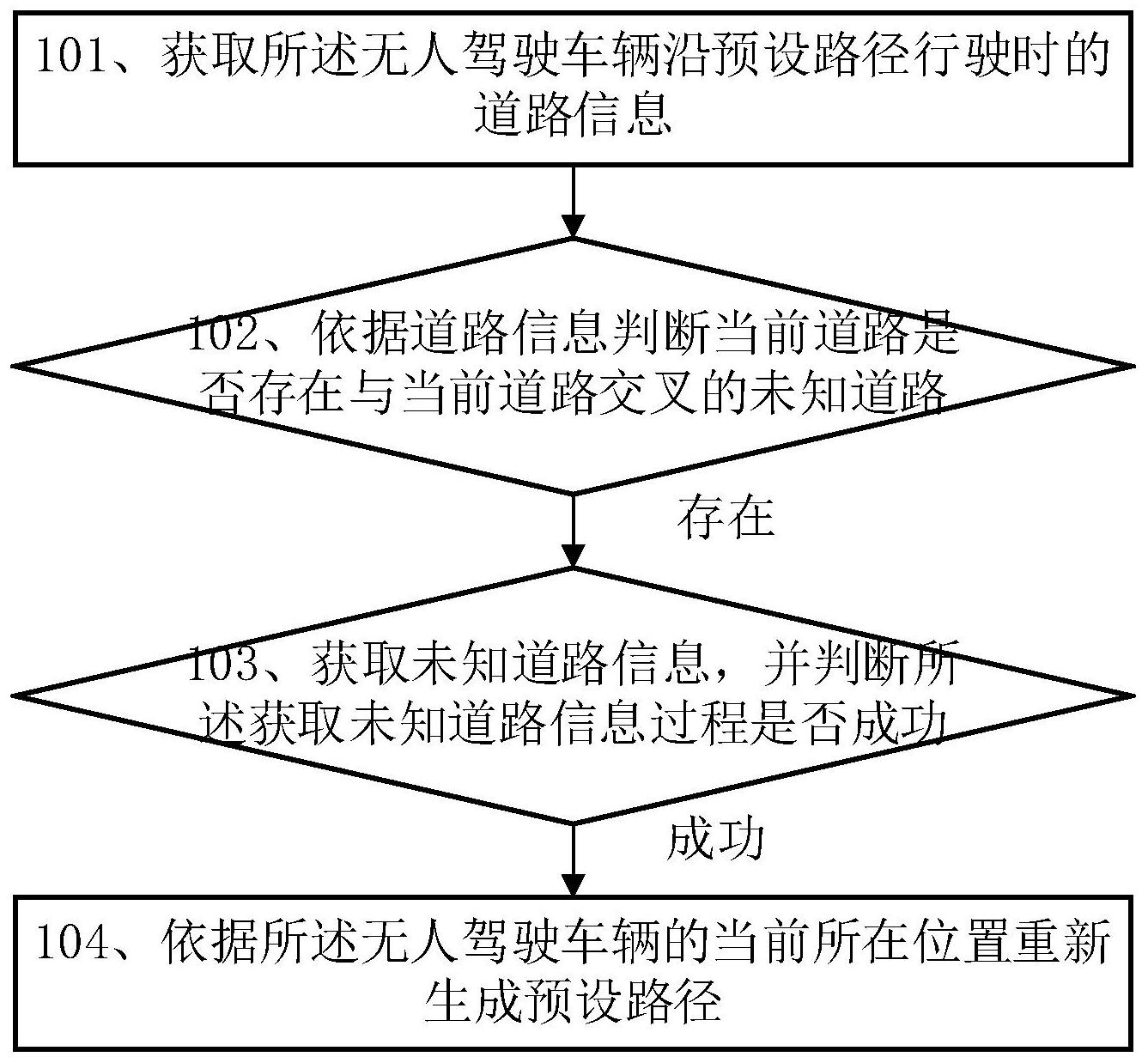
本申请实施例第一方面提供了一种车辆控制方法,应用于无人驾驶车辆,包括: 获取所述无人驾驶车辆沿预设路径行驶时的道路信息; 依据所述道路信息判断是否存在与当前道路交叉的未知道路; 若存在所述未知道路,则获取未知道路信息,并判断所述获取未知道路信息过程 是否成功; 若所述获取未知道路信息过程成功;则依据所述无人驾驶车辆的当前所在位置重 新生成预设路径。 基于本申请实施例第一方面所述的车辆控制方法,可选地,所述方法还包括: 若所述获取未知道路信息过程未成功,则沿所述未知道路行驶至所述未知道路与 已知道路的交叉处; 依据所述无人驾驶车辆的当前所在位置重新生成预设路径。 基于本申请实施例第一方面所述的车辆控制方法,可选地,所述方法还包括: 依据所述沿所述未知道路行驶至所述未知道路与已知道路的交叉处过程,生成所 述未知道路的信息; 向其他无人驾驶车辆发送所述未知道路的信息。 基于本申请实施例第一方面所述的车辆控制方法,可选地,所述获取所述未知道 路的信息,包括: 向其他无人驾驶车辆发送所述未知道路的起点信息,以使得所述其他无人驾驶车 辆返回所述未知道路信息。 4 CN 111717222 A 说 明 书 2/8 页 基于本申请实施例第一方面所述的车辆控制方法,可选地,所述依据所述无人驾 驶车辆的当前所在位置重新生成预设路径,包括: 确定所述无人驾驶车辆的当前所在位置及所述无人驾驶车辆的目标位置之间的 最短路径; 确定所述最短路径为所述预设路径。 基于本申请实施例第一方面所述的车辆控制方法,可选地,所述未知道路信息包 括所述未知道路的起点信息和所述未知道路的终点信息。 本申请实施例第二方面提供了一种车辆控制装置,应用于无人驾驶车辆,包括: 道路信息获取单元,用于获取所述无人驾驶车辆沿预设路径行驶时的道路信息; 判断单元,用于依据所述道路信息判断是否存在与当前道路交叉的未知道路,若 存在所述未知道路,则触发未知道路信息获取单元; 未知道路信息获取单元,用于获取未知道路信息,并判断所述获取所述未知道路 信息过程是否成功,若所述获取未知道路信息过程成功,则触发预设路径生成单元; 预设路径生成单元,用于依据所述无人驾驶车辆的当前所在位置重新生成预设路 径。 基于本申请实施例第二方面所述的车辆控制装置,可选地, 所述设备还包括:行驶单元,用于若所述获取未知道路信息过程未成功,则沿所述 未知道路行驶至所述未知道路与已知道路的交叉处; 所述预设路径生成单元,具体用于依据所述无人驾驶车辆的当前所在位置重新生 成预设路径。 基于本申请实施例第二方面所述的车辆控制装置,可选地, 所述车辆控制装置还包括:发送单元,用于依据所述沿所述未知道路行驶至所述 未知道路与已知道路的交叉处过程,生成所述未知道路的信息; 向其他无人驾驶车辆发送所述未知道路的信息。 基于本申请实施例第二方面所述的车辆控制装置,可选地, 所述未知道路信息获取单元,具体用于向其他无人驾驶车辆发送所述未知道路的 起点信息,以使得所述其他无人驾驶车辆返回所述未知道路信息,并判断所述向其他无人 驾驶车辆发送所述未知道路的起点信息,以使得所述其他无人驾驶车辆返回所述未知道路 信息过程是否成功,若所述向其他无人驾驶车辆发送所述未知道路的起点信息,以使得所 述其他无人驾驶车辆返回所述未知道路信息过程成功,则触发预设路径生成单元; 基于本申请实施例第二方面所述的车辆控制装置,可选地, 所述预设路径生成单元,具体用于确定所述无人驾驶车辆的当前所在位置及所述 无人驾驶车辆的目标位置之间的最短路径; 确定所述最短路径为所述预设路径。 基于本申请实施例第二方面所述的车辆控制装置,可选地,所述未知道路信息包 括所述未知道路的起点信息和所述未知道路的终点信息。 本申请实施例第三方面提供了一种车辆控制设备,包括: 中央处理器,存储器,输入输出接口,有线或无线网络接口以及电源; 所述存储器为短暂存储存储器或持久存储存储器; 5 CN 111717222 A 说 明 书 3/8 页 所述中央处理器配置为与所述存储器通信,在所述人员计数设备上执行所述存储 器中的指令操作以执行本申请实施例第一方面中任意一项所述的方法。 本申请实施例第四方面提供了一种计算机可读存储介质,包括指令,当所述指令 在计算机上运行时,使得计算机执行如本申请实施例第一方面中任意一项所述的方法。 本申请实施例第五方面提供了一种包含指令的计算机程序产品,当其在计算机上 运行时,使得计算机执行如本申请实施例第一方面中任意一项所述的方法。 从以上技术方案可以看出,本申请实施例具有以下优点:基于无人驾驶车辆在行 驶过程中所获得的道路信息进行判断,并在发现未知道路时获取该未知道路的具体信息, 依据所获取到的道路信息重新生成无人驾驶车辆的行驶路径。进而使得无人驾驶车辆的预 设路径可依据实时获得的道路信息进行改变,避免无人驾驶车辆在行驶过程中出现不必要 的行程,进而提高了无人驾驶车辆的行驶智能性。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 申请的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图获得其他的附图。 图1为本申请车辆控制方法实施例的一个流程示意图; 图2为本申请车辆控制方法实施例的另一个流程示意图; 图3为本申请车辆控制装置实施例的一个结构示意图; 图4为本申请车辆控制装置实施例的另一个结构示意图。 图5为本申请车辆控制设备实施例的另一个结构示意图。











