
技术摘要:
一种多场景自适应三指机械手,包括悬挂安装座、以及安装于悬挂安装座上的一个主体机械指和两个副体机械指,主体机械指通过主结构支架安装在悬挂安装座上,两个副体机械指分别通过副结构支架安装在主结构支架的两侧,副结构支架与主结构支架铰接;主体机械指和两个副体 全部
背景技术:
机械手是一种模仿人的手指动作,用机械驱动来实现对目标物的抓取、搬等动作, 通过编程完成各种预期工作。其在结构和性能上兼顾机械强度和人手指灵活的优点。 现有的机械手分为专用型机械手和通用型机械手:专用型机械手的手指是专门根 据目标物形状而设计的,能较好地配合目标物的形状特征进行稳定抓取和搬运;通用型机 械手大多设计有三指,五指,常以一定角度排布,实现对目标物的包覆式抓取和搬运。 传统机械手是利用机械驱动的夹紧力夹持目标物,但由于目标物的形状各异,往 往与机械手的接触方式不是理想的曲面接触或者平面接触,而多是点接触或者线接触,这 使得机械手手指对目标夹持的效果很差,在搬运过程中,被夹持物容易发生掉落。 公开号为CN108436957A的中国专利文献介绍了一种具有形状自适应的三指欠驱 动机械手。公开了具有形状自适应的三指欠驱动机械手的组成结构,属于工业机器人技术 领域,旨在提供一种机械手的技术方案,以蜗轮蜗杆驱动抓取结构的第一指骨实现旋转,以 压缩弹簧和推杆驱动欠驱动手指旋转贴合目标物的表面,并且在压缩弹簧的弹性范围内实 现欠驱动手指的表面与目标物的表面发生适当滑移,被动地调整第二指骨,使得目标物过 渡至更可靠,更稳定的受力状态,以此实现稳定抓取和搬运。 其技术方案要点是包括: (1)设计有第一、第二、第三,三处结构完全相同的欠驱动手指;三处手指的安装位 置在底座上是依次以120°相隔,均匀分布; (2)每处手指包括驱动电机,蜗杆蜗杆,第一、第二指骨,依次用销轴构成以销轴为 转动中心的转动连接,以蜗轮蜗杆为传动形式将驱动电机输出作用于第一指骨,驱动第一 指骨绕第一销轴转动; (3)第二指骨上设计有第一、第二接触面来与目标物表面接触; (4)第二指骨下侧安装有压缩弹簧和推杆模块,以此使得第二指骨的第一、第二接 触面能被动地与目标物表面发生滑移,使得机械手整体被动自适应物体的形状,使得接触 面与目标物表面充分接触,达到受力均匀和稳定抓取的设计目的; 但是,上述文献公开的技术方案存在以下问题: (1)三处手指的安装位置在底座上是依次以120°相隔,均匀分布,而每一处手指的 指骨转动范围都是处于一个竖直面内,使得抓取目标物的形状受到限制。在各类基本几何 形体中,十分明显地,该机械手不适合用于抓取圆柱状目标物(例如管道),仅能有一处手指 稳定接触圆柱表面,抓取效果将会很差; (2)虽然在第二指骨的结构上增加了压缩弹簧和推杆的配合,使得接触贴合效果 得到一定改善,但是本质上第二指骨的第一接触面,第二接触面都是刚性面,与目标物表面 仍然是不理想的小面积接触; 4 CN 111571632 A 说 明 书 2/5 页 (3)在此种小面积接触状态下,由于第二指骨和指端都是欠驱动的机械结构,要实 现稳定抓取,第一指骨上需要施加较大的力,这样既是导致对目标物产生破坏性损伤的可 能性,又对第一指骨的材料和结构强度提出了高的要求,导致制造加工成本上升。
技术实现要素:
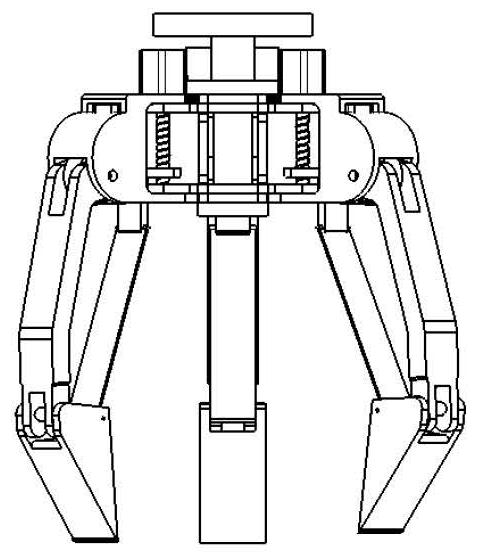
为克服上述问题,本发明提供一种能适应多种形状抓取物的多场景自适应三指机 械手。 本发明采用的技术方案是:一种多场景自适应三指机械手,包括悬挂安装座、以及 安装于悬挂安装座上的一个主体机械指和两个副体机械指,主体机械指通过主结构支架安 装在悬挂安装座上,两个副体机械指分别通过副结构支架安装在主结构支架的两侧,副结 构支架与主结构支架铰接;主体机械指和两个副体机械指在水平面上大致呈“T”字型分布, 主体机械指位于“T”字型的下端,两个副体机械指分别位于“T”字型的左右两端,且副体机 械指能够绕副结构支架与主结构支架的铰接点旋转; 副结构支架远离悬挂安装座的一端铰接有副体机械指,主结构支架远离悬挂安装 座的一端铰接有主体机械指;副体机械指包括互相铰接的指臂件和指端件,指臂件的上端 与副结构支架铰接,指臂件的下端与指端件铰接;主体机械指与副体机械指的结构一致,且 主体机械指与主结构支架的连接结构和副体机械指与副结构支架的连接结构一致; 副结构支架与悬挂安装座之间设有用于驱动副结构支架旋转的第一驱动机构;副 体机械指与副结构支架的铰接处设有用于驱动副体机械指旋转的第三驱动机构;指端件的 内侧与软钢带的下端固定连接,软钢带的上端与第二驱动机构连接,第二驱动机构通过软 钢带带动指端件向内旋转;软钢带的内侧表面设为抓取接触面,软钢带能在机械手的抓取 过程中自适应被抓取的物体形状;第一驱动机构,第二驱动机构和第三驱动机构均与控制 器电连接。 进一步,所述悬挂安装座包括由圆盘状的吊式安装底座和垂直设置于吊式安装底 座底面的悬挂主杆组成,悬挂主杆上设有马达安装座和主结构支架,悬挂主杆的底端与圆 盘状的安装底板通过螺纹连接,主结构支架固定安装于马达安装座与安装底板之间; 马达安装座呈圆盘状,马达安装座的中心穿设有悬挂主杆,马达安装座的两侧设 有用于安装马达输出轴的通孔,主结构支架的上表面设有与通孔的位置对应的弧形槽; 主结构支架包括支架本体,支架本体呈一侧开口的C字形,支架本体的开口处竖直 穿设有悬挂主杆,支架本体的上下两端均安装有用于与副结构支架铰接的连接板,连接板 呈椭圆盘状,连接板与支架本体的C字形轮廓垂直,连接板的轴心位于与悬挂主杆的轴心线 上;且支架本体上端的连接板位于支架本体的内侧,支架本体下端的连接板与支架本体连 为一体; 连接板上位于悬挂主杆的两侧分别铰接有两个副结构支架,副结构支架呈一侧开 口的C字形,连接板位于副结构支架的内侧;副结构支架的上端设有第一齿轮。 进一步,所述第一驱动机构包括马达,马达竖直安装于马达安装座的上表面上,马 达的输出轴竖直向下延伸至主结构支架的上表面;马达的输出轴上套设有第二齿轮,第二 齿轮与副结构支架上的第一齿轮相啮合,副结构支架能在第二齿轮的带动下相对于连接板 旋转。 5 CN 111571632 A 说 明 书 3/5 页 进一步,所述第二驱动机构包括第一步进电机和丝杆,副结构支架与主结构支架 通过丝杆铰接,丝杆的上下两端转动安装于副结构支架的上下表面内;第一步进电机安装 于副结构支架的上表面上,第一步进电机的输出轴与丝杆的上端相连接;丝杆上螺接有能 沿丝杆作上下往复运动的活动板,活动板呈倒L形,副结构支架的下表面设有与活动板的竖 直边对应的通槽;活动板的水平边与丝杆螺接,活动板的竖直边穿设副结构支架的下表面 与软钢带的上端固定连接,指端件能在软钢带、活动板的带动下相对于指臂件旋转。 进一步,所述第三驱动机构包括第二步进电机、蜗轮和蜗杆,副结构支架与副体机 械指的铰接处设有蜗轮,蜗轮的内侧设有与蜗轮相啮合的蜗杆,蜗杆的上端与第二步进电 机的输出轴固定连接,第二步进电机固定于副结构支架上表面的下方;副体机械指能在蜗 轮、蜗杆的带动下相对于副结构支架旋转。 本发明的有益效果是:能够通过改变两个副体机械指与主体机械指之间的夹角来 改变三指的分布,并以软钢片作为柔性作用件,来适应多种形状的目标物,实现柔性夹取和 稳定搬运的多场景自适应三指机械手。 附图说明 图1是本发明第一角度的结构示意图。 图2是本发明第二个角度的结构示意图。 图3是本发明第三个角度的结构示意图。 图4是悬挂安装座上安装有马达安装座、主结构支架和安装底板时的结构示意图。 图5是悬挂安装座上安装有马达安装座和安装底板时的结构示意图。 图6是主结构支架的结构示意图。 图7是副结构支架的结构示意图。 图8是副结构支架上安装有副体机械指的侧视图。 图9是副结构支架上安装有副体机械指的结构示意图。 图10是本发明抓取方形物体的侧视图。 图11是本发明抓取方形物体时三指的示意图。 图12是本发明抓取圆柱状物体的侧视图。 图13是本发明抓取圆柱状物体时三指的示意图。 图14是本发明抓取球形物体的侧视图。 图15是本发明抓取球形物体时三指的示意图。











