
技术摘要:
本发明公开了一种单目视觉系统成像参数标定装置及方法,包括单目视觉系统、置于单目视觉系统前方的标定物以及图像采集与分析模块,单目视觉系统包括镜头和相机,镜头与相机之间的距离或镜头内的镜片组与相机之间的距离可调;标定物为表面具有纹理的一个或一组平面标定 全部
背景技术:
单目多聚焦立体视觉是一种通过采集场景多聚焦图像实现场景三维感知的视觉 技术,实现场景三维感知的前提条件是精确获取单目视觉系统的成像参数,现有的相机标 定方法多假定像距等于焦距,无法实现单目视觉系统成像参数精确标定,因此制约了单目 多聚焦立体视觉技术的三维感知精度。
技术实现要素:
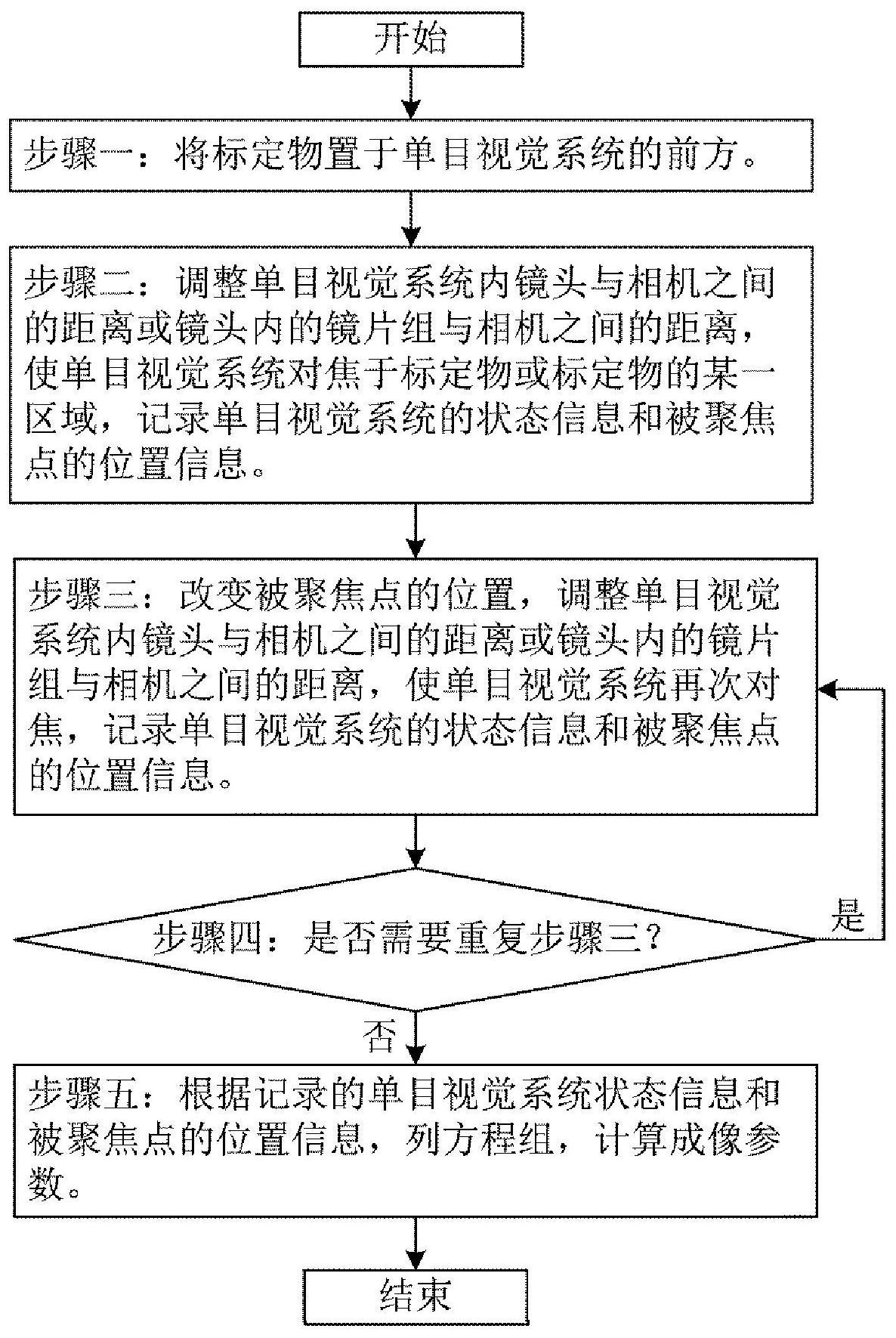
针对现有技术中的缺陷和不足,本发明提供了一种单目视觉系统成像参数标定装 置及方法,实现单目视觉系统成像参数精确标定,为保障单目多聚焦立体视觉技术的三维 感知精度提供技术条件。 为达到上述目的,本发明采取如下的技术方案: 一种单目视觉系统成像参数标定装置,包括单目视觉系统、置于单目视觉系统前 方的标定物以及与单目视觉系统相连的图像采集与分析模块以采集单目视觉系统拍摄所 述标定物的图像并分析整幅图像或图像的部分区域是否准确对焦; 所述单目视觉系统包括镜头和相机,且镜头位于相机和标定物之间;所述镜头与 相机之间的距离或镜头内的镜片组与相机之间的距离可调,所述单目视觉系统上设有第一 位移传感器或第一测距传感器以使镜头、镜头内的镜片组以及相机的移动距离可测; 所述标定物为表面具有纹理的一个或一组平面标定板;若标定物为一个平面标定 板,则平面标定板可移动且移动距离可测;若标定物为一组平面标定板,则各平面标定板平 行且平面标定板之间的距离可测; 或所述标定物为表面具有纹理的三维标定块且该三维标定块的表面形貌信息已 知;三维标定块是固定的或可移动的,移动的距离可测或不可测; 所述纹理包括经表面处理、粘贴或投影形成的纹理。 本发明还包括如下技术特征: 具体的,所述平面标定板旁有第二位移传感器或第二测距传感器以测量平面标定 板的移动距离。 本发明还提供一种采用所述的单目视觉系统成像参数标定装置的单目视觉系统 成像参数标定方法,包括以下步骤: 步骤一:将标定物置于单目视觉系统的前方; 步骤二:调整单目视觉系统内镜头与相机之间的距离或镜头内的镜片组与相机之 间的距离,使单目视觉系统对焦于标定物或标定物的某一区域,记录单目视觉系统的状态 信息和被聚焦点的位置信息; 3 CN 111598931 A 说 明 书 2/4 页 步骤三:改变被聚焦点的位置,调整单目视觉系统内镜头与相机之间的距离或镜 头内的镜片组与相机之间的距离,使单目视觉系统再次对焦,记录单目视觉系统的状态信 息和被聚焦点的位置信息; 步骤四:判断是否需要重复步骤三,若需要,跳到步骤三,若不需要,执行步骤五; 步骤五:根据记录的单目视觉系统状态信息和被聚焦点的位置信息,根据单目视 觉系统的成像公式列方程组,计算成像参数; 具体的,所述单目视觉系统的状态信息由第一测距传感器或第一位移传感器获 得,所述被聚焦点的位置信息是事先已知的或由第二测距传感器或第二位移传感器获得。 具体的,所述步骤四判断是否需要重复步骤三的方法是,判断标定过程中单目视 觉系统对焦的次数是否小于确定数值,若小于该确定数值,则需要重复步骤三,否则,则不 需要重复步骤三; 该确定数值为大于或等于待标定成像参数的个数。 具体的,所述单目视觉系统的成像公式为透镜成像公式,当方程组的个数多于待 标定成像参数的个数时,方程组的求解方法为最小二乘法。 本发明与现有技术相比,有益的技术效果是: 本发明提出一种单目视觉系统成像参数标定装置,该装置结构简单,只需要测量 距离或位移,易于实现单目视觉系统成像参数标定;还提出一种单目视觉系统成像参数标 定方法,通过调整单目视觉系统,使系统对焦于不同远近的物体或区域,通过单目视觉系统 状态信息和被聚焦点的位置信息,利用成像公式联立方程组求解成像参数,易于实现单目 视觉系统成像参数精确标定。 附图说明 图1本发明单目视觉系统成像参数标定装置的示意图1; 图2本发明单目视觉系统成像参数标定装置的示意图2; 图3本发明单目视觉系统成像参数标定装置的示意图3; 图4本发明单目视觉系统成像参数标定方法的流程图。 图中标号代表:1-单目视觉系统,2-标定物,3-图像采集与分析模块; 11-镜头,12-相机; 21-平面标定板,22-三维标定块。 以下对本发明的











