
技术摘要:
本申请公开了一种机器人抱闸释放方法、机器人及具有存储功能的装置,所述抱闸释放方法包括:驱动机器人关节沿第一旋转方向旋转第一预设角度;判断随所述机器人关节同步旋转的所述抱闸的刹车片是否被所述抱闸的档杆阻挡;若是,则驱动所述机器人关节沿与所述第一旋转方 全部
背景技术:
当机器人处于未使能状态时,由于重力作用,每个关节对应的抱闸中的刹车片和 档杆会相互压紧,产生较大的摩擦力,以阻止关节大范围运动。当机器人处于使能状态时, 抱闸的档杆需要收回以释放抱闸,只有释放了抱闸,关节才能大范围运动。但由于摩擦力的 作用,档杆可能会被卡住无法抽回。 目前在机器人使能时促使档杆收回的方式为:伺服驱动器持续给抱闸中位于档杆 外围的线圈连续发送多个48V脉冲,每个脉冲都会促使档杆被收回。与此同时,伺服驱动器 驱动关节进行小范围摆动,当关节摆动到某个角度,档杆不受摩擦力作用时,档杆在脉冲的 作用下可以顺利收回。 由于抱闸的额定工作电压为5V,连续发送的多个脉冲会导致抱闸发热,线圈膨胀, 从而降低抱闸的使用寿命;此外,在某些情况下,前几个48V脉冲就可以让档杆收回,后续发 送的多个脉冲是无用的,这将导致时间浪费以及效率降低。
技术实现要素:
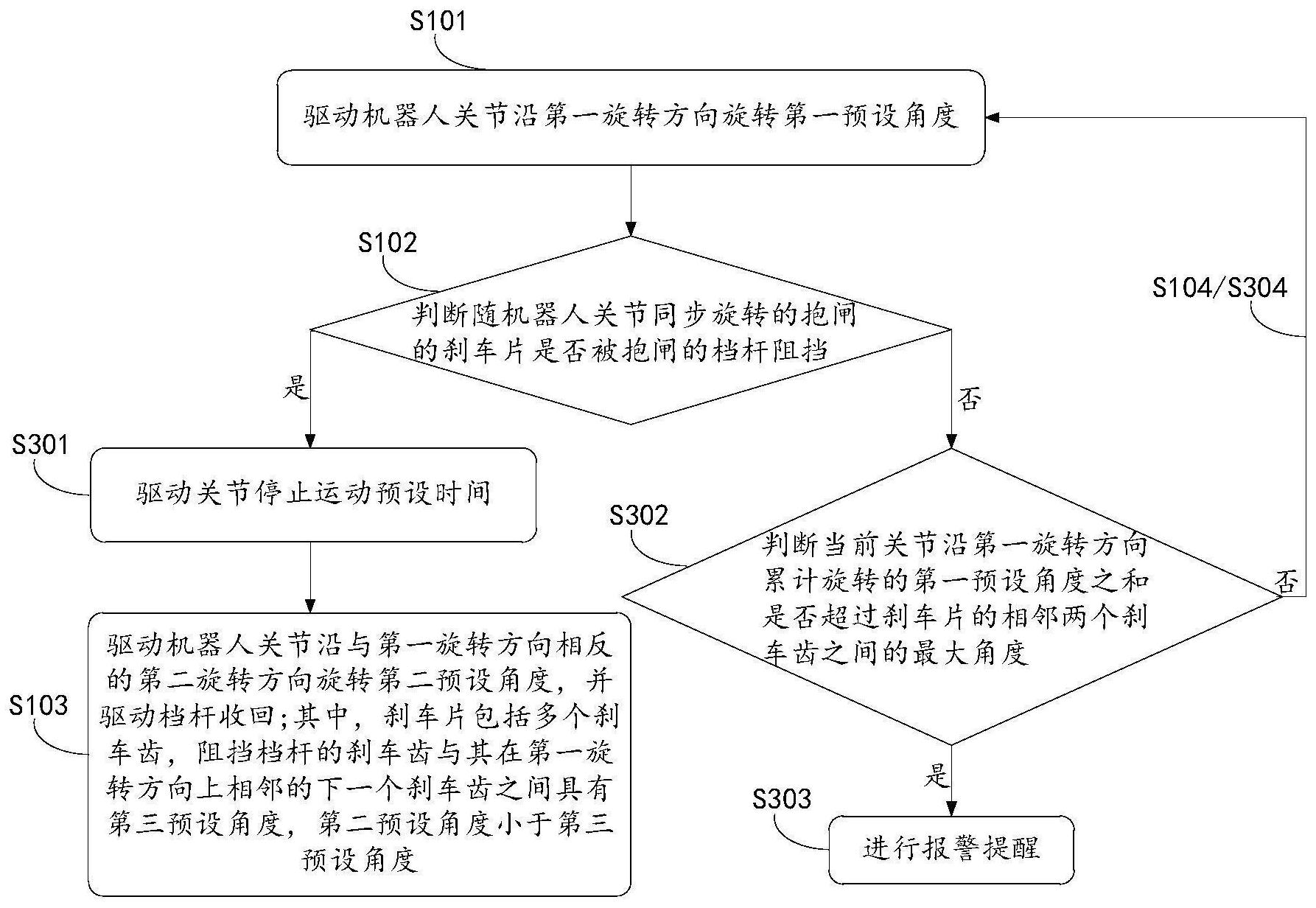
本申请主要解决的技术问题是提供一种机器人抱闸释放方法、机器人及具有存储 功能的装置,能够使档杆较为容易地收回。 为解决上述技术问题,本申请采用的一个技术方案是:提供一种机器人抱闸释放 方法,所述抱闸释放方法包括:驱动机器人关节沿第一旋转方向旋转第一预设角度;判断随 所述机器人关节同步旋转的所述抱闸的刹车片是否被所述抱闸的档杆阻挡;若是,则驱动 所述机器人关节沿与所述第一旋转方向相反的第二旋转方向旋转第二预设角度,并驱动所 述档杆收回,其中,所述刹车片包括多个刹车齿,阻挡所述档杆的所述刹车齿与在所述第一 旋转方向上相邻的下一个所述刹车齿之间具有第三预设角度,所述第二预设角度小于所述 第三预设角度;否则,返回至所述驱动机器人关节沿第一旋转方向旋转第一预设角度的步 骤。 为解决上述技术问题,本申请采用的又一个技术方案是:提供一种机器人,包括关 节、抱闸、以及伺服驱动器,其中,所述抱闸包括刹车片和档杆,所述关节和所述刹车片在所 述伺服驱动器的驱动作用下同步旋转,所述伺服驱动器在工作时控制自身以及所述关节、 所述刹车片和所述档杆实现上述任一实施例中所述的抱闸释放方法的步骤。 为解决上述技术问题,本申请采用的又一个技术方案是:提供一种具有存储功能 的装置,存储有程序数据,所述程序数据能够被执行以实现上述任一实施例中所述抱闸释 放方法中的步骤。 本申请的有益效果是:本申请所提供的抱闸释放方法中只有在判断随机器人关节 4 CN 111590546 A 说 明 书 2/5 页 同步旋转的抱闸的刹车片被抱闸的档杆阻挡时,才驱动机器人关节沿与当前第一旋转方向 相反的第二旋转方向旋转第二预设角度,并驱动档杆收回,且该第二预设角度小于第三预 设角度,第三预设角度为阻挡档杆的刹车齿与其在第一旋转方向上相邻的下一个刹车齿之 间的角度。即采用本申请所提供的抱闸释放方法可与在判断关节运动受到阻碍时,驱动关 节反向运动至确定档杆与刹车片无摩擦的位置后,再驱动档杆收回。驱动档杆收回时,由于 档杆与刹车片非接触,可以降低档杆收回时所受到的摩擦力,从而可以减少驱动档杆收回 的脉冲个数,节约了时间,且降低了抱闸的升温,提高了抱闸的使用寿命。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。其中: 图1为本申请机器人抱闸释放方法一实施方式的流程示意图; 图2为抱闸一实施方式的结构示意图; 图3为图2中刹车片沿第一旋转方向旋转后与档杆干涉一实施方式的结构示意图; 图4为图1中步骤S102一实施方式的流程示意图; 图5为关节实际位置信息和理论位置信息一实施方式的对照示意图; 图6为本申请机器人一实施方式的结构示意图; 图7为本申请具有存储功能的装置一实施方式的结构示意图。











