
技术摘要:
本发明公开了一种利用惯导位置增量辅助GNSS模糊度固定的方法,采用载波相位差分GNSS/INS紧组合方式,即在原始GNSS伪距和载波相位观测值层面进行信息融合,利用惯导递推的相对位置增量辅助GNSS RTK模糊度解算。为了提高模糊度固定的成功率和可靠性,模糊度固定过程中采 全部
背景技术:
基于全球导航卫星系统(Global Navigation Satellite System,GNSS)的实时动 态差分定位技术(Real-time Kinematics,RTK)可以实时获取厘米级的高精度三维位置信 息。获取厘米级高精度定位的前提是正确地固定载波相位整周模糊度。在开阔天空环境下, 采用双频观测值能够迅速可靠地固定整周模糊度。然而,在复杂GNSS观测环境(例如城市) 中,GNSS信号不可避免地会被遮挡和干扰,此时,GNSS定位的精度、连续性和可靠性将不可 避免地降低。 惯性导航系统(Inertial Navigation System,INS)是一种以牛顿定律为基础的 完全自主的导航系统,具有自主工作、导航参数完备和短期精度高等优点。将INS与GNSS进 行有效融合可实现优势互补,提升各自的导航性能。其中,基于GNSS载波相位观测值层面的 RTK/INS紧组合可以利用INS的短期高精度位置信息来辅助GNSS模糊度解算,模糊度固定成 功后可利用高精度的载波相位观测值辅助INS实现高精度定位定姿。 GNSS RTK/INS紧组合实现厘米级定位的关键在于GNSS载波相位观测值的整周模 糊度解算。传统的方法均通过INS预测的绝对位置信息作为约束来辅助模糊度固定。然而, 对于RTK/INS紧组合而言,如果当前历元接受了错误的模糊度并将其用于紧组合滤波更新, 那么紧组合的位置分量将会出现偏差。如果继续使用带有偏差的绝对位置约束去辅助后续 历元的模糊度解算,那么该错误的约束将会阻止后续历元模糊度的正确固定,甚至导致紧 组合滤波发散。
技术实现要素:
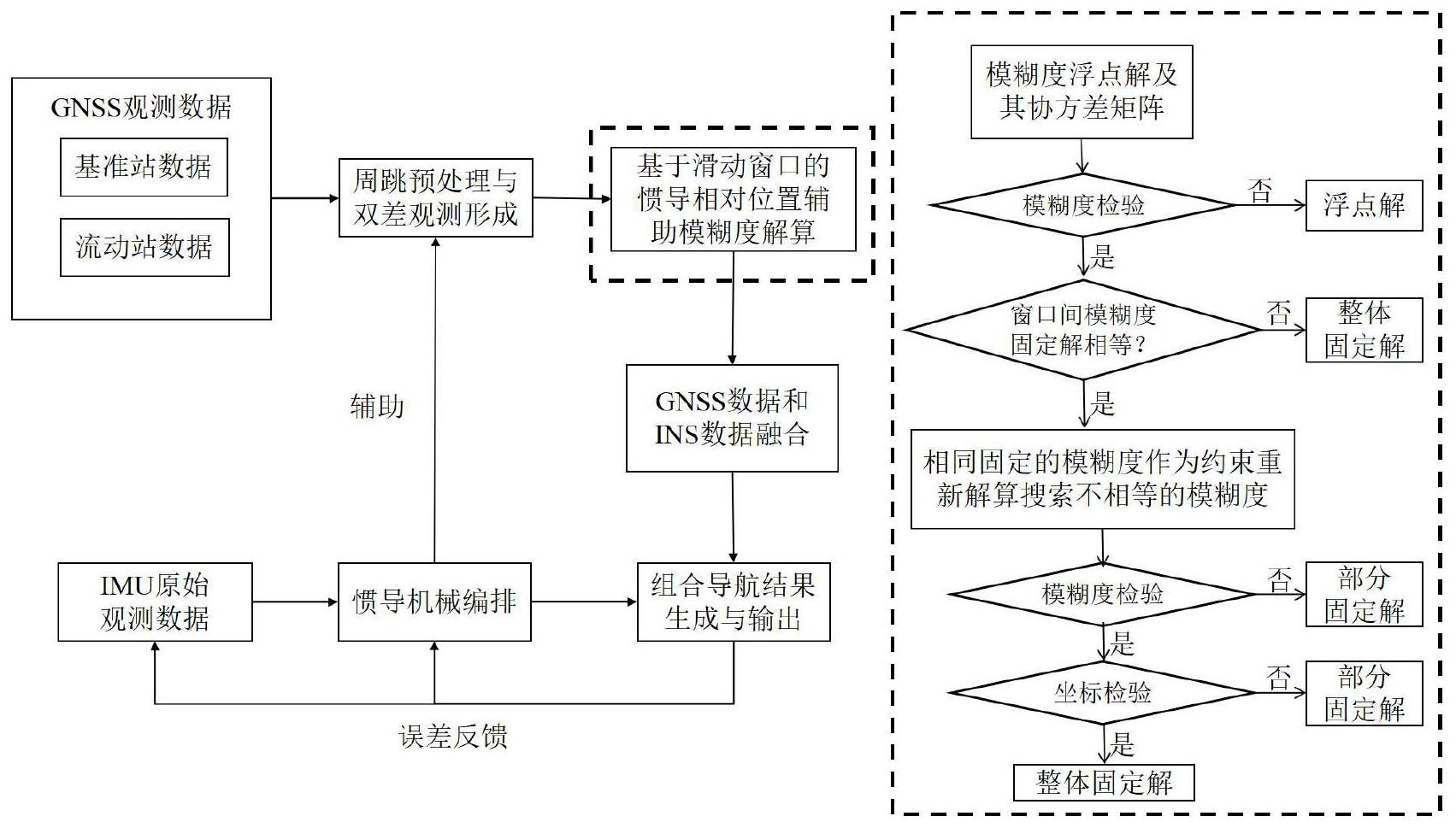
有鉴于此,本发明提供了一种利用惯导位置增量辅助GNSS模糊度固定的方法,用 以有效克服传统方法的固有缺陷并提高模糊度固定的可靠性。 因此,本发明提供了一种利用惯导位置增量辅助GNSS模糊度固定的方法,包括如 下步骤: S1:在当前GNSS历元下,利用INS递推的位置信息辅助GNSS周跳探测,筛选出无周 跳的卫星,并从所述无周跳的卫星中,选出高度角最高的卫星作为参考卫星,其余卫星为非 参考卫星;根据基准站坐标、INS递推的流动站坐标、非参考卫星坐标以及参考卫星坐标,计 算出几何双差距离;根据基准站接收机和流动站接收机接收参考卫星和非参考卫星的信号 转化成的伪距观测值,计算出伪距双差观测值;根据基准站接收机和流动站接收机接收参 考卫星和非参考卫星的信号转化成的载波相位观测值,计算出载波相位双差观测值;将所 述几何双差距离分别与所述伪距双差观测值和所述载波相位双差观测值作差,得到伪距 OMC值和载波相位OMC值; 7 CN 111578935 A 说 明 书 2/12 页 S2:将当前GNSS历元与前一GNSS历元之间INS递推的流动站的相对位置增量测量 值作为虚拟观测值,将当前GNSS历元的虚拟观测值、伪距OMC值和载波相位OMC值以及之前 预设时间间隔内的所有GNSS历元的虚拟观测值、伪距OMC值和载波相位OMC值作为滑动窗口 进行模糊度批处理解算,得到模糊度浮点解和模糊度浮点解的协方差矩阵; S3:根据解算得到的模糊度浮点解和对应的协方差矩阵计算ratio检验值和 BootStrapping成功率,判断是否ratio检验值大于第一阈值且BootStrapping成功率大于 第二阈值;若否,则执行步骤S4后执行步骤S11;若是,则执行步骤S5; S4:将解算得到的模糊度浮点解代入载波相位OMC值; S5:将各个滑动窗口内独立解算且固定的模糊度进行比较,判断各个滑动窗口内 同一个GNSS历元的模糊度固定解是否相同;若是;则执行步骤S6后执行步骤S11;若否,则执 行步骤S7; S6:确认模糊度全部正确固定,将全部正确固定的模糊度代入载波相位OMC值; S7:将部分正确固定的模糊度作为约束重新进行模糊度批处理解算,并根据解算 得到的模糊度浮点解和对应的协方差矩阵计算ratio检验值和BootStrapping成功率,判断 是否ratio检验值大于第一阈值且BootStrapping成功率大于第二阈值;若是,则执行步骤 S8;若否,则执行步骤S10后执行步骤S11; S8:搜索各个滑动窗口内不相同的模糊度固定解,利用部分正确固定的模糊度和 搜索的模糊度固定解重新计算流动站坐标,并与利用部分正确固定的模糊度计算的流动站 坐标进行对比,判断对比的差异是否小于第三阈值;若是,则执行步骤S9后执行步骤S11;若 否,则执行步骤S10后执行步骤S11; S9:将新搜索出来的模糊度固定解与部分正确固定的模糊度代入载波相位OMC值; S10:将部分正确固定的模糊度代入载波相位OMC值; S11:将载波相位OMC值与惯性传感器输出的IMU观测值进行融合,实时在线估计 IMU传感器误差、位置误差、速度误差和姿态误差,采用闭环校正对IMU传感器误差和导航参 数误差、位置误差、速度误差和姿态误差进行反馈校正,输出最终的位置、速度和姿态结果; 返回步骤S1,进行后一GNSS历元的观测数据处理,直至处理完后续历元的观测数 据。 在一种可能的实现方式中,在本发明提供的上述利用惯导位置增量辅助GNSS模糊 度固定的方法中,步骤S1,在当前GNSS历元下,利用INS递推的位置信息辅助GNSS周跳探测, 筛选出无周跳的卫星,并从所述无周跳的卫星中,选出高度角最高的卫星作为参考卫星,其 余卫星为非参考卫星;根据基准站坐标、INS递推的流动站坐标、非参考卫星坐标以及参考 卫星坐标,计算出几何双差距离;根据基准站接收机和流动站接收机接收参考卫星和非参 考卫星的信号转化成的伪距观测值,计算出伪距双差观测值;根据基准站接收机和流动站 接收机接收参考卫星和非参考卫星的信号转化成的载波相位观测值,计算出载波相位双差 观测值;将所述几何双差距离分别与所述伪距双差观测值和所述载波相位双差观测值作 差,得到伪距OMC值和载波相位OMC值,具体包括: 载波相位差分GNSS/INS紧组合模型包括误差状态模型和观测模型,导航坐标系选 为地心地固坐标系,误差状态模型为: 8 CN 111578935 A 说 明 书 3/12 页 其中, 和 分别表示位置误差、速度误差和姿态误差, 表示位 置误差的时间导数, 表示速度误差的时间导数, 表示姿态误差的时间导数, 表 示载体坐标系到导航坐标系的旋转矩阵,fb表示加速度计输出的比力,δfb表示加速度计输 出的比力的误差, 表示地球自转角速度, 表示 的反对称矩阵, 表示陀 螺输出的角速度误差,δge表示重力误差,δbg表示陀螺的零偏误差,δba表示加速度计的零偏 误差, 表示陀螺的零偏误差的时间导数, 表示加速度计的零偏误差的时间导数, 表示陀螺的零偏误差对应的一阶高斯马尔科夫相关时间, 表示加速度计的零偏误 差对应的一阶高斯马尔科夫相关时间,wg表示陀螺的零偏误差对应的驱动白噪声,wa表示加 速度计的零偏误差对应的驱动白噪声; 对于每颗卫星有如下的观测方程: 其中, 表示双差算子,下标b和r分别表示基准站和流动站,上标m和n分别表示 参考卫星和非参考卫星;P和 分别表示伪距观测值和载波相位观测值,ρ表示接收机到卫 星的几何距离,T和I分别表示对流层延迟和电离层延迟,λ和N分别表示载波波长和载波相 位整周模糊度; 表示基准站和流动站对参考卫星和非参考卫星形成的伪距双差观 测值, 表示基准站和流动站对参考卫星和非参考卫星形成的几何双差距离, 表示基准站和流动站对参考卫星和非参考卫星形成的双差对流层延迟, 表 示准站和流动站对参考卫星和非参考卫星形成的双差电离层延迟, 表示基准站和 流动站对参考卫星和非参考卫星形成的载波相位双差观测值, 表示基准站和流动 站对参考卫星和非参考卫星形成的载波相位双差模糊度, 表示伪距双差观测值的 噪声, 表示载波相位双差观测值的噪声; 根据单颗卫星的观测方程,建立任一GNSS历元tk时刻的观测模型如下: Zk=Hkδxk ηk (3) 其中,Hk表示紧组合设计矩阵,用于描述滤波更新的观测量与系统误差状态之间 的投影关系,观测量包括伪距双差观测值和载波相位双差观测值;ηk表示量测噪声向量;Zk 9 CN 111578935 A 说 明 书 4/12 页 表示滤波观测量;δxk表示待估计的误差状态量; 对于任一可观测到的卫星j,当前GNSS历元tk与前一GNSS历元tk-1之间INS递推的 双差载波相位增量表示为: 其中, 表示使用惯导递推的GNSS天线处的位置计算的几何双差距离, 和 分别表示tk时刻和tk-1时刻的几何双差距离;当前GNSS历元tk与 前一GNSS历元tk-1的载波相位增量通过下式计算: 其中, 表示以周为单位的载波相位测量值, 和 分别表示 tk时刻和tk-1时刻的载波相位双差观测值;将公式(5)与公式(4)作差后得到周跳探测的决 策量为: 周跳探测的决策量的阈值使用经验值: 其中,γ表示根据经验选择的比例因子;ej表示从流动站接收机位置到第j颗卫星 位置的单位视线向量, 表示ej的转置;Pδv表示组合导航卡尔曼滤波器协方差矩阵中速度 误差对应的协方差子块矩阵。 在一种可能的实现方式中,在本发明提供的上述利用惯导位置增量辅助GNSS模糊 度固定的方法中,步骤S2,将当前GNSS历元与前一GNSS历元之间INS递推的流动站的相对位 置增量测量值作为虚拟观测值,将当前GNSS历元的虚拟观测值、伪距OMC值和载波相位OMC 值以及之前预设时间间隔内的所有GNSS历元的虚拟观测值、伪距OMC值和载波相位OMC值作 为滑动窗口进行模糊度批处理解算,得到模糊度浮点解和模糊度浮点解的协方差矩阵,具 体包括: 设流动站接收机在当前GNSS历元tk与前一GNSS历元tk-1的近似坐标分别为 和 则流动站接收机在当前GNSS历元tk与前一GNSS历元tk-1的坐标真值分别表示为: 其中, 和 分别表示流动站接收机在当前GNSS历元tk与前一GNSS历元 tk-1的位置改正项;根据惯导递推的位置增量 得到当前GNSS历元tk与前一GNSS历元 tk-1的近似坐标满足如下关系式: 10 CN 111578935 A 说 明 书 5/12 页 流动站接收机在当前GNSS历元tk与前一GNSS历元tk-1的坐标真值用惯导递推的位 置增量真值表达为: 其中,ΔXINS表示惯导递推的位置增量真值;综合公式(8)、公式(9)、公式(10)和公 式(11)得到: 惯导递推的位置增量的精度的标准差通过组合导航卡尔曼滤波器中的速度误差 协方差计算得到: 其中,Pδv表示组合导航卡尔曼滤波器协方差中速度误差对应的协方差子块矩阵; 将公式(12)作为虚拟观测值,结合当前GNSS历元tk与前一GNSS历元tk-1的伪距OMC值和载波 相位OMC值,得到如下模糊度解算模型: 其中,nk表示tk时刻待求模糊度的个数; 表示利用INS推算的流动站接收机 近似坐标和卫星坐标计算的几何双差距离; 和 分别表示tk-1和tk时刻的紧组合设 计矩阵,由各颗卫星的双差方向余弦构成;Λ表示对角矩阵,包含各颗卫星的载波波长;I3×3 表示单位矩阵; 和 分别表示tk-1和tk时刻伪距双差测量值的误差改正数, 和 分别表示tk-1和tk时刻载波相位双差观测值的误差改正数,εINS表示惯导推 算的位置增量误差改正数, 表示待求解的双差模糊度参数, 和 分别表 示tk-1和tk时刻的伪距双差观测值, 和 分别表示tk-1和tk时刻的载波相位双 差观测值, 和 分别表示tk-1时刻和tk时刻的几何双差距离, 表示nk ×3的零向量,03×1表示3×1的零向量, 表示nk×nk的零向量, 表示3×nk的零 向量。 在一种可能的实现方式中,在本发明提供的上述利用惯导位置增量辅助GNSS模糊 度固定的方法中,步骤S3中,根据解算得到的模糊度浮点解和对应的协方差矩阵计算ratio 检验值和BootStrapping成功率,具体包括: Ratio检验值定义为次优模糊度残差二次型和最优模糊度残差二次型的比值,计 算公式为: 11 CN 111578935 A 说 明 书 6/12 页 其中, 表示模糊度浮点解, 和 分别表示次优整数模糊度组和最优整数模糊 度组, 表示模糊度协方差矩阵; BootStrapping成功率的计算公式如下: 其中, 表示整数变换后的模糊度标准差,Φ表示标准正太分布函数。 在一种可能的实现方式中,在本发明提供的上述利用惯导位置增量辅助GNSS模糊 度固定的方法中,步骤S3中,第一阈值为3,第二阈值为0.99。 在一种可能的实现方式中,在本发明提供的上述利用惯导位置增量辅助GNSS模糊 度固定的方法中,步骤S8中,第三阈值为0.25米。 本发明提供的上述利用惯导位置增量辅助GNSS模糊度固定的方法,采用载波相位 差分GNSS/INS紧组合方式,即在原始GNSS伪距和载波相位观测值层面进行信息融合,利用 惯导递推的相对位置增量辅助GNSS RTK模糊度解算。为了提高模糊度固定的成功率和可靠 性,模糊度固定过程中采用滑动窗口的方式联合利用多个历元的观测值,采用批处理的方 式解算模糊度。模糊度固定成功后将对应的高精度载波相位OMC值与IMU观测值进行融合实 现高精度高可靠的定位定姿。本发明提出了利用INS相对位置增量辅助差分GNSS模糊度固 定的新方法,克服了传统INS辅助模糊度固定方法在组合系统位置出现有偏时阻碍模糊度 正确固定的缺陷,提高了GNSS RTK/INS紧组合的可靠性和可用性。 附图说明 图1为本发明提供的一种利用惯导位置增量辅助GNSS模糊度固定的方法的流程 图。











