
技术摘要:
本发明涉及教学系统技术领域,具体涉及一种讲课设备定位控制系统及方法,旨在解决现有技术中需要人工将讲课设备归位到原来的位置,或通过导轨控制桌椅移位,出现效率低、成本大的问题,其技术要点在于包括以下步骤:根据学生及老师的课程安排记录所有的归位点的位置坐 全部
背景技术:
随着科技的进步,我们已经进入了一个高速发展的信息时代,以计算机技术为核 心的多媒体以及通信技术被广泛地应用于各个领域。在教育领域也是一样,随着技术的更 新和设备价格的下调,信息化教室已在全国各地普及。 根据学生及老师的课程安排,在不同的时间段会有不同的教室使用要求,这就引 出一个问题,需要人工将讲课设备(讲课设备包括但不限于桌子、椅子、讲麦、投影仪)归位 到原来的位置。 现有的解决方案是:以椅子为例,将椅子安装到地面,地面装有导轨,需要归位时 直接通过导轨将椅子移动到初始位置。 但这种方法归位的灵活度不高,每个椅子只能固定的回到预先设定的初始位置; 而且需要对地面进行重新设计,即在地面铺设导轨。
技术实现要素:
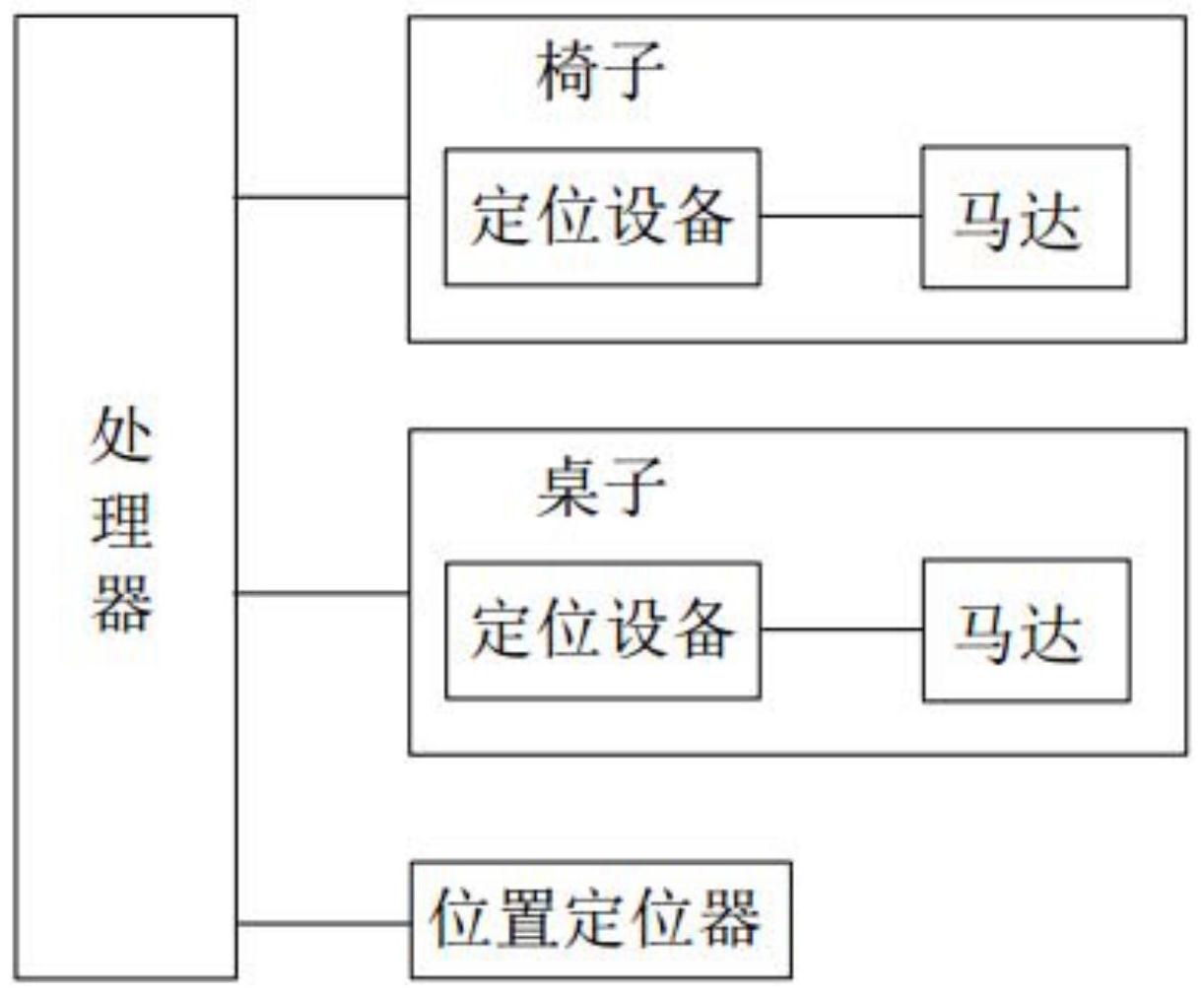
因此,本发明要解决的技术问题在于克服现有技术中需要人工将讲课设备归位到 原来的位置,或通过导轨控制桌椅移位,效率低、成本大的缺陷,从而提供一种讲课设备定 位控制系统及方法。 本发明的上述技术目的是通过以下技术方案得以实现的: 一种讲课设备定位控制系统,其特征在于,包括讲课设备,以及用于对所述讲课设 备进行定位并有序排布的处理器; 所述讲课设备包括桌子、椅子以及至少一个用于定位的位置定位器; 所述桌子、椅子上均安装有用于驱动轮子的马达,以及与所述位置定位器配套的 定位设备; 所述处理器根据学生及老师的课程安排预先记录有所有的归位点的位置坐标,并 能够根据所述位置定位器、定位设备计算所有桌子和椅子当前位置的位置坐标,进而分配 对应的归位点; 所述处理器还用于在分配完成后,根据当前位置的位置坐标和归位点的位置坐 标,通过安装在桌子和椅子上的马达控制其向对应的归位点移动,直至达到归位点。 可选地,所述桌子、椅子上还安装有角度传感器; 所述角度传感器用于计算和控制桌子、椅子向归位点移动时,其轮子需要转过的 角度; 所述角度传感器还用于判断并控制使得椅子到达归位点后,椅子的正面正对桌 子。 可选地,所述处理器还包括分配模块; 4 CN 111588180 A 说 明 书 2/6 页 所述分配模块用于计算所有桌子、椅子和归位点的距离,并依次将距离各个归位 点最近的桌子、椅子分配给各个归位点。 本发明还提供了一种讲课设备定位控制方法,包括以下步骤: 根据学生及老师的课程安排记录所有的归位点的位置坐标; 计算所有待归位桌子、椅子的当前位置的位置坐标,进而分配对应的归位点; 根据当前位置的位置坐标和归位点的位置坐标,通过安装在桌子、椅子上的马达 控制其向对应的归位点移动,直至达到归位点。 可选地,所述计算所有待归位桌子、椅子的当前位置的位置坐标,进而分配对应的 归位点的步骤包括: 对所述归位点进行排序,根据排序顺序,依次计算每个归位点与各个未被分配的 桌子、椅子的距离; 每个归位点将分配给与之距离最近的未被分配的桌子、椅子,直至最后一个归位 点被分配为止。 可选地,所述根据当前位置的位置坐标和归位点的位置坐标,通过安装在桌子、椅 子上的马达控制其向对应的归位点移动,直至达到归位点的步骤包括: 分配完成后,按照归位点的排序顺序,顺序地控制各个桌子、椅子向对应的归位点 移动。 可选地,每个归位点将分配给与之距离最近的未被分配的桌子、椅子,直至最后一 个归位点被分配为止的步骤之后还包括: 前一个归位点分配完成,则立即控制对应的桌子、椅子向对应的归位点移动; 同时或完成后,进行后一个归位点的桌子、椅子分配计算。 可选地,,所述桌子、椅子的归位模式包括一一对应模式和距离最近原则模式; 在一一对应模式中,每个归位点与每个桌子、椅子唯一对应,在归位操作时,一一 对应归位; 在距离最近原则模式中,每个归位点与每个桌子、椅子在每次归位操作时,需要重 新计算所有待归位桌子、椅子的当前位置的位置坐标,并根据距离最近原则分配对应的归 位点,进而控制归位。 本发明的有益效果是:本发明取消了导轨,而采用马达来控制桌子、椅子归位,因 而无需对地面进行重新设计;由于预先记录了所有的归位点的位置坐标,如此,在需要归位 时,可以计算所有的待归位桌子、椅子的当前位置的位置坐标,并以更适应当前情况的方式 分配对应的归位点,再进行控制归位,归位的控制灵活度高;而且,当出现桌子、椅子损坏情 况时,更换维修要便利许多。 附图说明 为了更清楚地说明本发明











