
技术摘要:
本发明的目的在于,提供一种,即使在如纸币捆的容易下垂的物体在该物体的容纳箱的宽度方向上的露出部分非常狭窄的情况下,当通过臂搬运该物体时也尽可能稳定地把持该物体的机械手。本发明的机械手(100)包括:第一指部(110)、第二指部(120)、指部移动机构(130)滑动承受 全部
背景技术:
过去提出了“应用了带机械手的臂的纸币处理装置”(例如,日本特开昭62-92095 号公报等)。在这样的纸币处理装置中,通过带机械手的臂来将纸币捆搬运到纸币计数纸币 确认单元,纸币捆在纸币计数纸币确认单元中按照币种类别被分类,并且对每个币种的张 数进行计数(count)。然后,分类为各个币种的纸币捆,按照币种的类别通过另一个带机械 手的臂搬运到规定位置。 现有技术 专利文献 专利文献1:日本特开昭62-92095号公报
技术实现要素:
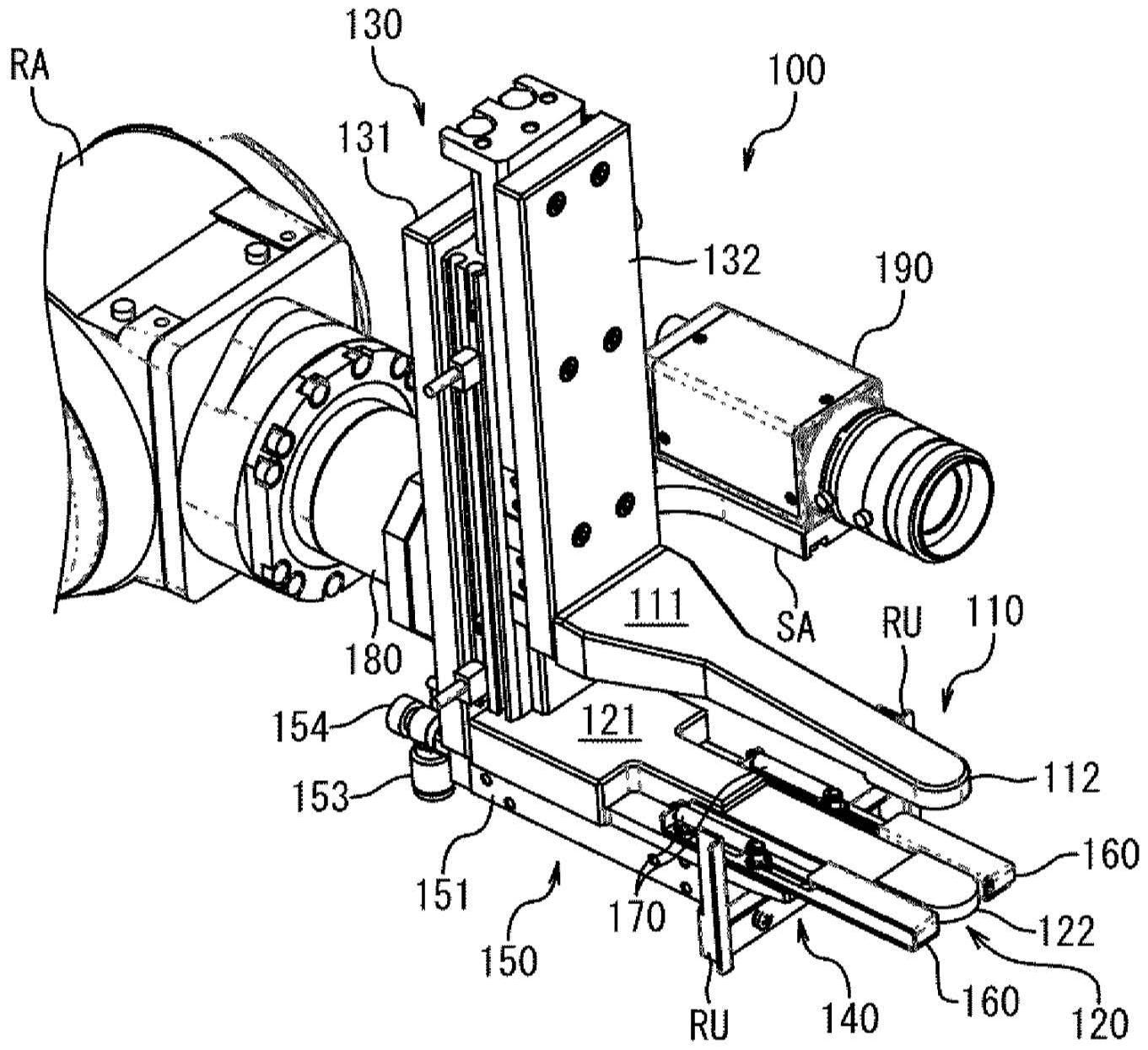
发明所要解决的问题 但是,存在有需搬运的纸币捆MT容纳于如图4所示的纸币收纳容器200的情况。在 该情况下,带机械手的臂需要从该纸币收纳容器200抽出纸币捆MT,并且将该纸币捆MT搬运 至纸币计数纸币确认单元。但是,在如上所述的纸币收纳容器200中,纸币捆MT在该纸币收 纳容器200的宽度方向上的露出部分非常狭窄。因此,存在着这样的忧虑:当机械手抓住纸 币捆MT并直接将纸币捆MT从纸币收纳容器200抽出时,纸币捆MT会向机械手的指部的两侧 下垂,在通过带机械手的臂来搬运纸币捆MT时,纸币捆MT的姿势有可能变得不稳定。 本发明的目的在于,提供一种,即使在如纸币捆的容易下垂的物体在该物体的容 纳箱的宽度方向上的露出部分非常狭窄的情况下,当通过臂搬运该物体时,也尽可能稳定 地把持该物体的机械手。 解决问题的技术方案 本发明的第一方面的机械手包括:第一指部、第二指部、指部移动机构以及施力构 件。第二指部以与第一指部对置的方式配设。指部移动机构使第一指部和第二指部中的至 少一方沿着第一指部和第二指部的对置方向进行移动。滑动承受部至少配设于第一指部和 第二指部中的至少一个指部的单侧侧面的附近。并且,该滑动承受部能够沿着与指部的进 深方向平行的方向进行滑动移动。需要说明的是,该滑动承受部的物体承受侧的表面优选 存在于包含指部的对置面的表面上,但是也可以稍微朝向与指部对置的一侧的相反侧偏移 (offset)。施力构件对滑动承受部朝向指部的前端侧施力。 如上所述,在该机械手设置有滑动承受部和施力构件。因此,在该机械手中,若将 附近配设有滑动承受部的指部的宽度设计成比物体在容纳箱的宽度方向上的露出部分的 宽度更窄,则在欲将该指部插入于该露出部分的上侧或下侧时,滑动承受部能够通过抵接 于容纳箱的一部分来后退,从而能够使该指部进入到该物体的上侧或下侧,进而机械手的 3 CN 111601689 A 说 明 书 2/7 页 指部能够对该物体的露出部分进行把持。并且,当机械手把持该物体的露出部分并将该物 体拉出时,滑动承受部被施力构件推回到前端侧,由此滑动承受部位于该物体的上侧或下 侧,从而能够增加该物体的承受面积。因此,即使在如纸币捆的容易下垂的物体在该物体的 容纳箱的宽度方向上的露出部分非常狭窄的情况下,该机械手也能在通过臂搬运同物体时 也尽可能稳定地把持该物体。 附图说明 图1是本发明的实施方式的机械手的立体图。 图2是本发明的实施方式的机械手的推压部处于待机状态的右侧视图。 图3是本发明的实施方式的机械手的推压部处于突出状态的右侧视图。 图4是用于容纳本发明的实施方式的机械手抽出的纸币捆的纸币收纳容器的立体 图。 图5是表示通过本发明的实施方式的机械手来将纸币捆载置于纸币整理机的载置 托盘时的状态的剖视图。 图6是表示将本发明的实施方式的机械手的指部插入于纸币收纳容器时的滑动承 受部的状态的立体图。 图7是表示将本发明的实施方式的机械手的指部从纸币收纳容器中抽出时的滑动 承受部的状态的立体图。











