
技术摘要:
本发明公开了一种利用计算机进行深度学习与集成神经网络的室内定位方法,包括存储器、处理器、信号发射端和接收端;CSI数据处理模块对CSI原始数据信息进行预处理后将多个数据集中的数据映射到[0,1]范围上;深度学习模块对数据集中的数据进行特征提取生成多个特征集;神 全部
背景技术:
随着智慧城市的发展,室内定位的需求日益增长。随着Wi-Fi网络的广泛应用,利 用Wi-Fi无线电波定位室内的位置吸引了很多研究者。其中,无设备室内定位、跟踪、识别任 何物体或人体,已成为一个日益热点的问题。 在无设备定位中,用户不需要携带任何设备,只需要将发射机和接收机固定在室 内,利用用户的存在所引起的无线电波变化的特征模式来估计位置。由于信道状态信息 (Channel State Information,CSI)为信号传输提供了更为详尽的信息,因此针对基于CSI 的无设备室内定位的研究得到了广泛的开展,其应用场景如图1所示。 以往基于CSI的定位主要采用指纹识别的方法。因为其具有实现简单、精度高、算 法灵活等优点。然而,传统的指纹匹配方案需要将所有的测试样本存储在数据库中。这将严 重影响定位效率和精度,因为在复杂的室内环境中,大部分测试样本都是有噪声的。同时, 由于CSI是高维数据,随着数据量的增加,训练成本和处理复杂度也增加了一倍。 近年来,机器学习在CSI的处理中得到了越来越多的应用。但是,由于所采集到的 CSI信号通常是有噪声的,现有的机器学习的方法在特征选择上都是主观的,对于充分利用 信号有一定的局限性。 目前,基于深度学习的CSI定位技术已经成为一种新的趋势。深度学习方法提取 CSI数据特征,找出数据与位置的函数关系。与传统方法不同,深度学习可以在不进行特征 工程的情况下提取高阶特征。对于大数据项目,深度神经网络可以大大提高系统的准确性。 因此,深度学习提高了系统的定位精度和稳定性。 目前已有多项利用深度学习进行室内无设备定位的工作,如PhaseFi、DeepFi、 CIFI、1D-CNN等。然而,DeepFi和PhaseFi需要使用每个参考点的数据来训练网络模型,这会 带来大量的计算和较长的训练时间。CIFI需要将一维信号转换成类似于图像的二维矩阵, 增加了网络的复杂度和转换开销。1-CNN只将参考点分成几个类别,不能直接输出用户的坐 标信息。最重要的是,这些方法只构建一个单独的网络来训练模型。然而,不同训练集生成 的网络模型定位精度往往不同,不同神经网络参数得到的模型也不同。同时,要得到一个具 有足够定位精度的网络模型需要大量的试错,这是非常耗时的。
技术实现要素:
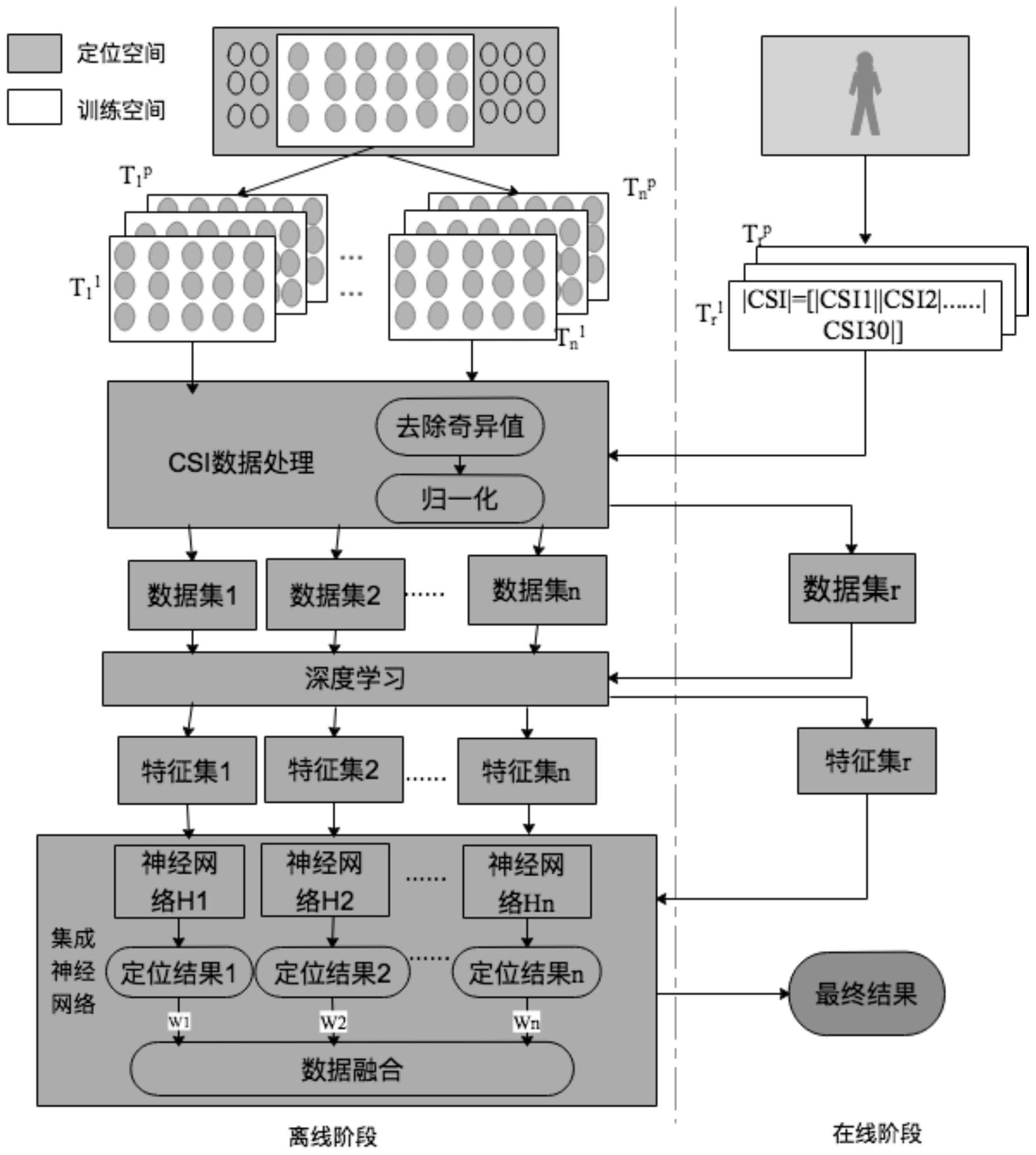
本发明旨在设计一种无设备的基于CSI的室内定位方法,提高室内定位系统的泛 化性,降低计算复杂度,提高定位精度。 为解决上述技术问题,本发明提供一种基于深度学习与集成神经网络的室内定位 方法,利用CSI信息实现快速准确的定位。利用深度学习提取与位置相关的核心特征,降低 4 CN 111551893 A 说 明 书 2/4 页 CSI指纹的维数,从而降低计算复杂度。为了处理使用不同CSI数据集训练得到的网络不同 从而造成最终定位结果不稳定,本发明利用集合神经网络对多个神经网络进行编码,得到 更稳定的结果。 本发明的目的通过以下步骤实现来实现: 一种基于深度学习与集成神经网络的室内定位方法,包括存储器、处理器、信号发 射端和接收端; —所述信号发射端采集定位信息的二维坐标数据信号进行发送; —所述接收端将上述二维坐标数据信号生成CSI原始数据信息; —所述处理器调取存储器中程序代码实现室内定位,包括如下步骤: CSI数据处理模块对CSI原始数据信息进行预处理后将多个数据集中的数据映射 到[0,1]范围上; 深度学习模块对数据集中的数据进行特征提取生成多个特征集; 神经网络模块将若干个特征集数据进行加权和处理生成估算坐标值输出。 所述CSI数据处理模块对CSI原始数据信息进行预处理,包括如下步骤: 对原始CSI数据进行预处理,对其进行降噪处理,使用如下公式去除奇异值,即计 算每个CSI数据与其前后数据的差值Ei,如果Ei大于设置的阈值,则认为是奇异值,直接去 除; Ei=(CSIi-CSI 2i-1) (CSIi-CSI 2i 1) 将去除奇异值的数据归一化,使用如下公式将数据映射到[0,1]上, 所述深度学习模块对数据集中的数据进行特征提取生成多个特征集,包括如下步 骤: 从训练样本中随机选取一个样本,并使用该样本初始化可见层的状态vi; 通过可见层状态vi求的隐含层状态hj,再通过hj获得可见层状态vi 1; 通过如下公式调整各层的权值Δw,输出层偏置值Δa以及隐含层偏置值Δb; Δw=Pr(hj=1|vi)vi-Pr(hj 1=1|vi 1)vi 1 Δa=vi-vi 1 Δb=Pr(hj=1|vi)-Pr(hj 1=1|vi 1) 重复上述过程,直至模型输出值小于等于设置的阈值。 所述神经网络模块将若干个特征集数据进行加权和处理,包括如下步骤: 将多个特征集来训练多个不同的神经网络模型,如下公式所示: 其中S为样本个数,(TPx,TPy)为样本P的实际坐标值,(OPx,OPy)为样本P的神经网 络的预测值,使用误差回传的方法训练神经网络,直至MSE小于设置的阈值,停止训练; 根据每个神经网络的定位误差作为网络分配权值,如下公式所示: 5 CN 111551893 A 说 明 书 3/4 页 其中Ei为各个神经网络的定位误差,然后把总的定位误差∑Ei与单个网络模型的 定位误差Ei之比定义为精度系数pi,而Wi就等于pi除以总的精度系数之和; 根据分配权值进行数据融合获得估算坐标值。 有益效果 1.本发明提出了一种基于集成神经网络的高效无设备室内定位框架,减少了训练 网络的试错次数,提高了定位精度和稳定性。 2.本发明提出了一种基于深度神经网络的定位方法,利用深度学习从CSI原始数 据中提取核心特征,利用多层感知器(multi-layer perceptron,MLP)将定位问题转化为回 归问题进行预测。与现有方法相比,该方法简化了网络结构,不需要中间转换过程,从而减 少了计算开销。 附图说明 图1为本发明使用场景; 图2为基于深度学习与集成神经网络的无设备室内Wi-Fi定位方法的结构图; 图3为基于深度学习的深度自编码器的结构图; 图4为神经网络训练过程损失函数的变化图;











