
技术摘要:
本发明提出一种结构简单、能够对刷胶后鞋子胶线边缘位置测量的一种用于测量鞋子刷胶边缘胶线的装置,包括机架、鞋楦、工业机器人、3D视觉传感器,鞋楦设于所述机架上,工业机器人固定设于所述机架上,3D视觉传感器固定设于所述工业机器人的转动手臂上且3D视觉传感器位 全部
背景技术:
在制鞋行业,尤其是制鞋成型自动化生产线上,鞋子上刷胶是一个非常重要的环 节。现有的常用刷胶方式都是通过胶枪把胶水喷在鞋面上的上胶方式。由于喷胶的上胶方 式是通过气体把胶水雾化开后并在气流的吹动下散落在物体表面上,故喷胶的胶线宽度可 以很宽,胶线胶水的厚度可以很薄,而通过点胶头把胶水挤出来并落在物体表面上的涂胶 方式得到的胶线胶水厚度大都比喷胶的胶水厚度厚,故可以直接通过3D视觉传感器测量涂 胶胶线胶水的厚度(即外形轮廓)来实现对胶线边缘位置的测量,以筛选出合格的涂胶鞋 子。但鞋子鞋面的表面粗糙度无法与汽车行业或3C电子行业里的工件的表面相比,不易于 直接通过高精度的3D视觉传感器测量喷胶胶线胶水的厚度(即外形轮廓)来实现胶线边缘 位置的测量。
技术实现要素:
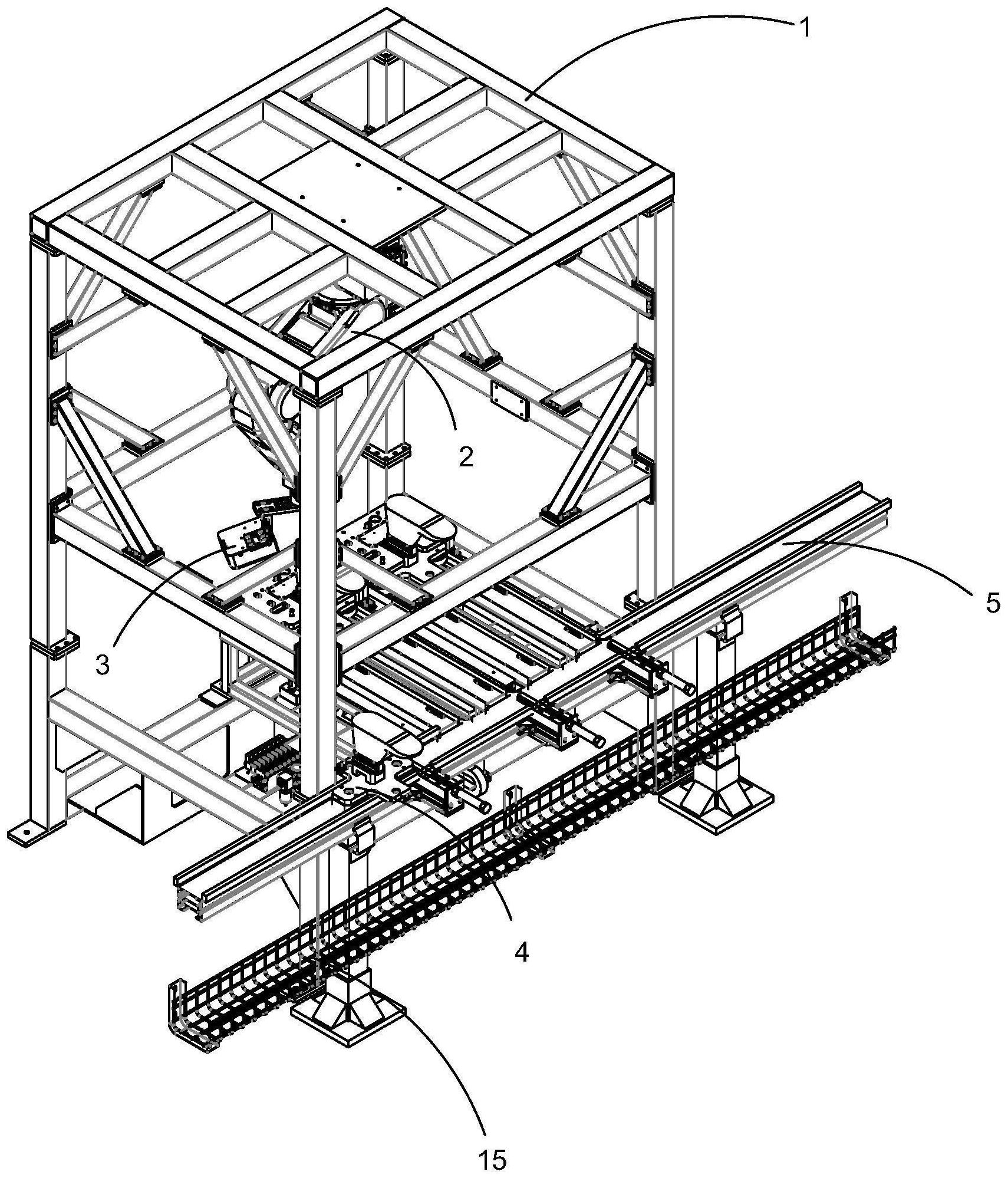
因此,针对上述的问题,本发明提出一种结构简单、能够对刷胶后鞋子胶线边缘位 置测量的一种用于测量鞋子刷胶边缘胶线的装置。 为实现上述目的,本发明的技术方案是提供了一种用于测量鞋子刷胶边缘胶线的 装置,包括机架、供刷胶后的鞋子套入的鞋楦、工业机器人、用于给刷胶后鞋子检测的3D视 觉传感器,所述鞋楦设于所述机架上,所述工业机器人固定设于所述机架上,所述3D视觉传 感器固定设于所述工业机器人的转动手臂上且3D视觉传感器位于所述鞋楦周侧,所述机架 上设有用于将鞋楦输送进行测量的自动输送装置,所述自动输送装置包括用于输送鞋楦的 柔性链,所述柔性链固定设于所述机架上,所述机架上固定设有定位鞋楦的定位块,所述定 位块上开设有供鞋楦穿入定位口,所述机架上固定设有供鞋楦滑入定位口的滑轨,所述滑 轨一端位于定位块内,所述滑轨另一端与所述柔性链相连通,所述机架上还设有夹持鞋楦 滑移的夹持装置,所述柔性链上固定设有固定架,所述固定架上开设有滑槽,所述滑槽内可 滑动设有限位杆,所述固定架上设有驱动所述限位杆滑动的第四驱动装置。 进一步改进的是:所述夹持装置包括夹持杆,所述夹持杆可上下升降设于所述机 架上,所述鞋楦上开设有供所述夹持杆插入的第一承插孔,所述机架上设有驱动所述夹持 杆上下滑动的第一驱动装置,所述机架上还设有用于驱动所述夹持杆在滑轨上滑动的第二 驱动装置。 进一步改进的是:所述第一承插孔内套设有弹性圈,所述夹持杆上开设有便于夹 持杆插入第一承插孔内的倒角。 进一步改进的是:所述定位块内固定设有若干缓冲块,所述鞋楦上设有带有弹性 的缓冲垫,所述缓冲块上开设有供缓冲垫卡入的缓冲口。 4 CN 111567989 A 说 明 书 2/6 页 进一步改进的是:所述缓冲垫上分别开设有第二承插孔,所述机架上固定设有可 穿入所述第二承插孔的撑杆,所述撑杆另一端固定设有连接块,所述连接块上设有用于驱 动所述撑杆上下升降的第三驱动装置。 进一步改进的是:所述第一驱动装置为升降气缸,所述升降气缸的伸出杆上固定 设有固定块,所述夹持杆固定设于所述固定块上,所述第二驱动装置为无杆气缸,所述升降 气缸固定设于所述无杆气缸的滑块上。 进一步改进的是:所述鞋楦上开设有若干个导向孔,所述定位块上固定设有供所 述导向孔穿入的导向杆,所述导向孔内设有弹性圈。 利用一种用于测量鞋子刷胶边缘胶线的装置测量边缘胶线的方法: 1):将通过刷有荧光增白剂胶水粘合的鞋子套入鞋楦,并且放到柔性链上; 2):柔性链将鞋楦传送到滑轨与柔性链的避让口处,此时升降气缸工作,驱动夹持杆上 升,使夹持杆插入第一承插孔内与第一承插孔卡合; 3):夹持杆与鞋楦卡合后,无杆气缸作业,带动鞋楦在滑轨内滑移,往定位架方向移动, 直至将鞋楦夹持进入定位口内; 4):第三气缸工作,带动撑杆插入第二承插孔,将鞋楦稳定定位在定位架的定位口内; 5):标定好3D视觉传感器的位置,3D视觉传感器开始工作对鞋子的刷胶路径进行测量, 测量步骤如下: S1::3D视觉传感器的一字线激光器发出紫外线光条,射在鞋子上,一字线激光被分成 三段,中间端因为胶水带有荧光增白剂而产生荧光色,呈现荧光光亮特征,上下两段呈现为 激光光亮特征,同时获取工业机器人的位置数据; S2::3D视觉传感器的摄像机拍照照射在鞋子上的紫外线光条,将拍照的图像传送到外 部的图像处理模块进行处理; S3:外部图像处理模块处理图像时,先将基于RGB颜色空间的彩色图片转成能更直观地 表达颜色的色调、鲜艳程度和明暗程度,方便进行颜色的对比的HSV颜色空间,然后图像处 理模块提取激光光亮特征和荧光光亮特征,再把激光光亮线条和荧光光亮线条细化处理, 最后把有荧光光亮线条的分离出来; S4:图像处理模块把提取到的细化后的激光光亮线条和荧光光亮线条处理得到像素坐 标; S5:根据线视觉测量原理计算得到激光线上的点在相机测量坐标系中的坐标值; S6:得到3D视觉传感器的测量结果及相对应的工业机器人位置数据后,外部视觉扫描 软件通过矩阵运算,把3D视觉传感器的测量结果转换到整个测量系统的测量坐标系下; S7:工业机器人带着3D视觉传感器围绕鞋子转动,并且不断重复a-f的步骤,视觉扫描 软件把3D视觉传感器的所有测量结果转换到整个测量系统的测量坐标系下,然后与预设定 的鞋子的刷胶边缘值进行对比,得出刷胶后合格的鞋子; 6):检测结束后,升降气缸工作,驱动夹持杆上升,使夹持杆插入第一承插孔内与第一 承插孔卡合,同时,第三气缸工作,使撑杆离开第二承插孔; 7):夹持杆与鞋楦卡合后,无杆气缸作业,带动鞋楦在滑轨内滑移,往柔性链方向移动, 鞋楦通过避让口到柔性链上,操作人员将测量后的合格和不合格的鞋子取下分类。 本发明的优点和有益效果在于: 5 CN 111567989 A 说 明 书 3/6 页 1、机器人能够带动3D视觉传感器在带有鞋子的鞋楦周围进行360°旋转测量,进而能够 对喷胶后的鞋子进行全方位的边缘检测,得到合格的刷胶后粘合的鞋子产品,剔除刷胶后 粘合不合格的鞋子。 2、自动输送装置能够将套设在鞋楦上的鞋子自动输送进入定位块内定位,供3D视 觉传感器检测,提高了检测效率,大大节约了人工。 3、缓冲垫和缓冲块能够防止鞋楦在卡入定位块内撞击定位块,损坏鞋楦和定位 块,减少其使用寿命。 4、夹持杆上的倒角能够方便夹持杆快速插入第一承插孔,第一承插孔内的第一弹 性橡胶圈能够防止夹持杆插入第一承插孔的时候损坏第一承插孔。 5、撑杆能够撑住鞋楦,使其更稳定的放置在机架上,保证了测量的准确性。同时还 能够在夹持杆插入第一承插孔的时候托起鞋楦,使夹持杆更好的插入第一承插孔。 6、鞋楦上的导向孔和定位块上的导向杆相卡合,能够在夹持杆和撑杆将鞋楦托起 的时候,使其能够垂直向上托起,不仅使夹持杆更好的对准第一承插孔插入夹持,还防止鞋 楦跑偏出滑轨。 7、固定架上的限位杆能够限制未检测的鞋子的鞋楦通过,使其在柔性链上进行等 待,使其能够迅速的为下一次检测做准备,并且将检测和为检测的鞋子区分开。 附图说明 图1为本发明实施例一种用于测量鞋子刷胶边缘胶线的装置结构示意图。 图2为本发明实施例一种用于测量鞋子刷胶边缘胶线的装置结构示意图。 图3为本发明实施例一种用于测量鞋子刷胶边缘胶线的装置局部结构示意图。 图4为本发明实施例建立笛卡尔直角坐标系的示意图。











