
技术摘要:
一种用于多个自动导引车AGV的感应无线充电系统,包括AGV控制系统和被配置为向AGV发射电磁功率的无线能量发射器。AGV可以是多轮控制的机器人车,其由电池驱动,并且每个AGV都在下部具有接收线圈。AGV可以被控制以在例如工厂的设施中穿行。当AGV在无线能量发射器上方移动 全部
背景技术:
在自动化生产中,必须在配置系统时考虑工艺流程的实际操作、产品设计以及组合的 优化。自动化生产可以包括自动导引车(AGV),它们是便携式机器人,可以跟随地板上的标 记或电线,或者使用视觉、磁铁或激光进行导航。AGV最常用于工业应用中,以在生产设施或 仓库中运送物料。AGV系统可以包括多个由电池供电的AGV,这些AGV可以沿预定的导引路径 通行。AGV可以使用多种制导技术在生产设施中通行,包括使用在地面上安装的磁带或磁 条、使用激光器,使用光学传感器以及使用基于磁体/陀螺仪的惯性制导。这些制导技术可 响应于生产设施的变化而轻松改变AGV的路线和扩展AGV系统,以提供灵活且可扩展的物料 处理方案。自动化生产需要高度自动化和灵活的生产系统;车间内的自动化物流配送方式 的要求包括:低成本、高可靠性以及AGV系统的灵活性。 AGV使用电池供电。为使设备正常运行,电池必须重新充电或更换。有时不希望意外中 止生产过程的预定操作顺序来停止或更换AGV而用于对接充电站。更换电池也需要时间、需 要额外的设备以及需要电池储备,并且AGV的构造也需要有利于快速取出和装载电池。所需 要的是改进的AGV,这种改进的AGV可以独立地运行以对其自身进行无线充电,从而在AGV充 电期间不需要停止生产过程。
技术实现要素:
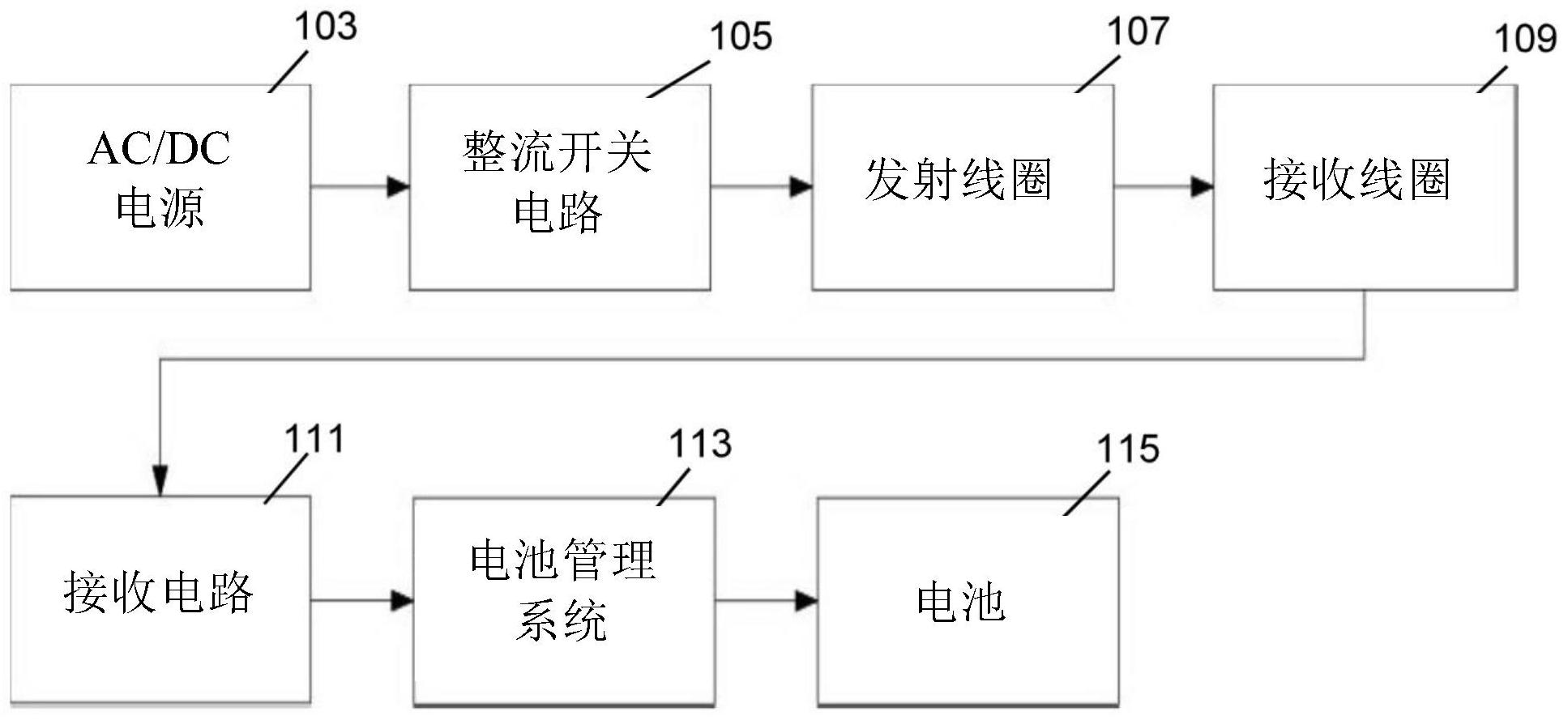
本申请涉及一种用于为多个AGV提供感应无线充电系统的系统和方法。AGV可以是由电 池驱动的多轮控制机器人车,其在下部具有接收线圈,该接收线圈用于为内部的电池充电。 可以控制AGV在整个设施中移动,例如具有无线能量发射器网络的工厂,其中无线能量发射 器网络由发射线圈组成,发射线圈耦接至电源并安装在地板内或升高的表面上。 AGV可以自主地运行和/或与AGV控制器通信。AGV可以被配置或控制而在无线能量发射 器上方移动,从而使接收线圈位于发射线圈上方。无线能量发射器可以被配置为:在位于能 量发射器上方的AGV的电池需要充电时,发射电磁功率。在其他实施例中,无线能量发射器 可以被配置为向位于能量发射器上方的AGV发射电磁功率,并且内部电池管理系统可以控 制施加至AGV电池的充电功率。更具体地,AGV控制器可以识别AGV的电池电量并打开AGV下 方的无线能量发射器。或者,AGV可以发射指示电池需要充电的信号,直接在AGV下方的无线 能量发射器可以发射电磁功率。 在一个实施例中,AGV可以独立运行或与可以与多个AGV协作运行(这些AGV可以通过连 杆、平台或其他耦接机构耦接在一起)。在一个实施例中,无线能量发射器可以彼此相邻地 布置为覆盖指定充电区域的二维阵列。AGV组件可以移动到这些较大的充电区域,其中在这 些充电区域中,无线能量发射器位于组件中的所有AGV下方,并且可以同时对所有电池进行 无线充电。在一个实施例中,可以分析AGV的路径,并且可以将无线能量发射器放置在最常 行驶的区域中,从而可以控制AGV在AGV穿行经过工厂时为电池充电而不需要仅仅为了充电 而停止AGV。 在一个实施例中,无线能量发射器可以在AGV存储区域中的细长的升高表面的上表面 4 CN 111605418 A 说 明 书 2/10 页 上。AGV的轮子可以跨过细长的升高表面的宽度,并且多个AGV可以移动到充电表面上的相 邻位置。升高的无线能量发射器表面减少了发射线圈和AGV的接收线圈之间的距离,这可以 提高能量传输的效率。 在一个实施例中,提供了一种充电系统,其包括:多个AGV,所述多个AGV中的每个AGV都 包括多个耦接至框架的轮子、电池以及在所述框架的下部的第一接收线圈;多个充电线圈, 所述多个充电线圈耦接至电源;以及AGV控制系统,所述AGV控制系统用于控制所述多个AGV 的移动。其中所述AGV控制系统被配置为将所述多个AGV中的每个AGV引导到相对于至少一 个所述充电线圈处于使所述接收线圈可操作地接收从所述充电线圈发射的电磁波的位置, 其中所述接收线圈被配置为将所述接收的电磁波转换为用于给所述电池充电的电功率。 在一个实施例中,提供了一种充电系统,其包括:多个自动导引车AGV,所述多个AGV中 的每个AGV都包括多个耦接至框架的轮子、电池以及在所述框架的下部上的第一接收线圈; 多个充电线圈,所述多个充电线圈耦接至电源;以及AGV控制系统,所述AGV控制系统用于控 制所述多个AGV的移动。其中所述AGV控制系统引导所述多个AGV中的每个AGV,以使所述接 收线圈在所述充电线圈上方移动,所述充电线圈发射电磁波,所述电磁波被所述接收线圈 接收并被转换为用于给所述电池充电的电功率。 附图说明 图1示出了无线功率传输至AGV的电池的一个实施例的框图。 图2示出了AGV的一个实施例的正视图。 图3示出了其中接收线圈沿纵向配置的AGV的一个实施例的仰视图。 图4示出了其中接收线圈沿纵向配置的AGV的一个实施例的正视图。 图5示出了其中接收线圈沿横向配置的AGV的一个实施例的仰视图。 图6示出了其中接收线圈沿横向配置的AGV的一个实施例的正视图。 图7示出了正由机器人组装的AGV组件的透视图。 图8示出了AGV组件的俯视图,其中AGV组件具有多个通过连杆耦接的AGV。 图9示出了接收线圈的一个实施例的分解透视图。 图10示出了无线能量发射器的一个实施例的俯视图。 图11示出了无线能量发射器的一个实施例的分解透视图。 图12示出了AGV存储区域的透视图,其中AGV存储区域具有多个在凸起表面上的无线能 量发射器。 图13示出了地板表面的透视图,其中地板表面具有多个无线能量发射器。 图14示出了具有多个区域的工厂的俯视图,其中配有多个邻近组装区域的无线能量发 射器。











