
技术摘要:
本发明公开了一种煤矿井下精确定位方法,包括如下步骤:S1.定位终端向定位基站发送RFID握手信息,定位基站判断是否收到RFID握手信息,若是,进入步骤S2,若否,进入步骤S3;S2.确定RFID定位结果;S3.定位终端判断是否收到定位基站发送的ZigBee入网信号,若是,则进行Zi 全部
背景技术:
RFID是一种射频识别技术,又称无线射频识别,可通无线电讯号识别特定目标并 读写相关数据,为一种非接触式的数据通信技术,可以在室内达到1-3米的定位精确度。 RFID的应用非常广泛,典型应用有动物晶片、汽车晶片防盗器、门禁管制、停车场管制、生产 线自动化、物料管理。 ZigBee无线通信技术是基于蜜蜂相互间联系的方式而研发生成的一项应用于互 联网通信的网络技术。相较于传统网络通信技术,ZigBee无线通信技术表现出更为高效、便 捷的特征。作为一项近距离、低成本、低功耗的无线网络技术,ZigBee无线通信技术其关于 组网、安全及应用软件方面的技术是基于IEEE批准的802.15.4无线标准。该项技术尤为适 用于数据流量偏小的业务,可尤为便捷地在一系列固定式、便携式移动终端中进行安装。 UWB技术是一种使用1GHz以上频率带宽的无线载波通信技术。它不采用正弦载波, 而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很大,尽管使用无线 通信,但其数据传输速率可以达到几百兆比特每秒以上。 矿井当前使用的井下人员考勤管理系统以有源RFID技术为主,定位精度为几十米 到几百米不等。有矿用人员定位管理系统采用zigbee技术实现静态条件下定位精度5米,移 动条件定位精度10米。也有矿井人员管理系统采用UWB技术实现30厘米定位精度,定位精度 较高但是成本相对较高。 市场上出现的很多精确定位系统,要么是定位精度低,还达不到煤矿的需求标准, 要么就是定位基站等硬件设备部署数量过大,整个系统部署造价太高。 因此,为解决以上问题,需要一种煤矿井下精确定位方法,能够自适应地测算目标 体在煤矿井下的位置,适用性好、定位精度高、定位成本低。
技术实现要素:
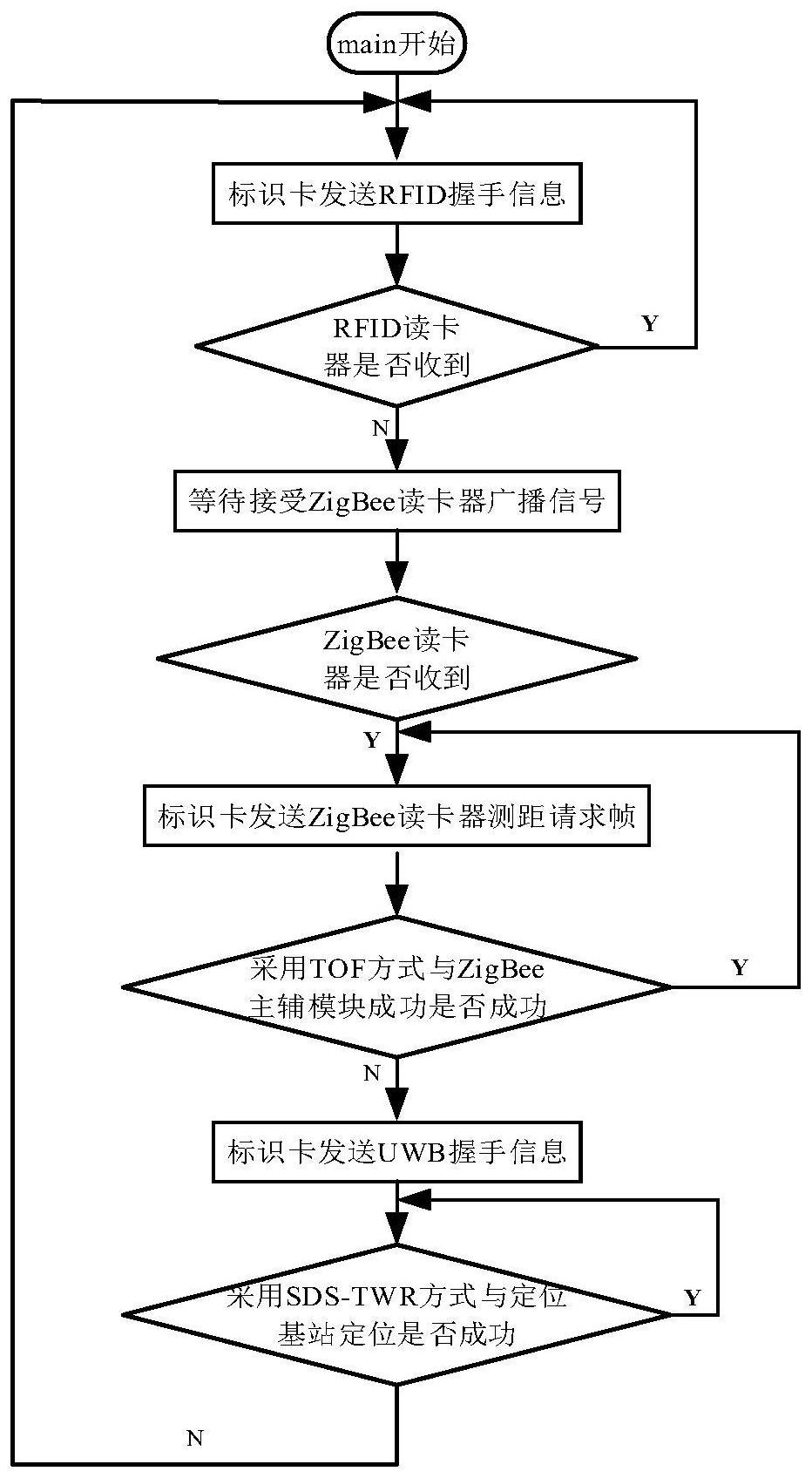
有鉴于此,本发明的目的是克服现有技术中的缺陷,提供煤矿井下精确定位方法, 能够自适应地测算目标体在煤矿井下的位置,适用性好、定位精度高、定位成本低。 本发明的煤矿井下精确定位方法,包括如下步骤: S1 .定位终端向定位基站发送RFID握手信息,定位基站判断是否接收到RFID握手 信息,若是,则进入步骤S2,若否,则进入步骤S3; S2.定位基站向定位终端发送确认信息,定位终端收到确认信息后向定位基站发 送定位信息,定位基站判断是否收到定位信息,若是,则定位终端在定位基站的测量范围 内,若否,则定位终端不在定位基站的测量范围内; S3.定位基站向定位终端发送广播信号,定位终端收到广播信号后向定位基站发 送ZigBee定位测距请求信号,定位基站判断是否收到ZigBee定位测距请求信号,若是,则根 4 CN 111586838 A 说 明 书 2/6 页 据ZigBee定位模式确定定位终端的位置,若否,则进入步骤S4; S4.定位终端向定位基站发送UWB握手信息,定位基站收到UWB握手信息后向定位 终端发送确认信息,并根据UWB定位模式确定定位终端的位置。 进一步,步骤S3中,所述ZigBee定位模式采用TOF测距算法确定定位终端分别与 ZigBee第一定位模块和ZigBee第二定位模块之间的距离,并根据所述距离计算得到定位终 端的位置。 进一步,确定定位终端分别与ZigBee第一定位模块和ZigBee第二定位模块之间的 距离,具体包括: S31.确定定位终端与ZigBee第一定位模块的距离d1; 所述距离 其中,Tf为定位终端向ZigBee第一定位模块 发送数据的时刻;Tt为ZigBee第一定位模块收到定位终端发送数据的时刻;Ts为ZigBee第一 定位模块向定位终端发送回复数据的时刻;Tr为定位终端收到ZigBee第一定位模块发送回 复数据的时刻;C为电磁波在介质中的传播速度; S32.确定定位终端与ZigBee第二定位模块的距离d2; 所述距离 其中,T′f为定位终端向ZigBee第二定位模 块发送数据的时刻;T′t为ZigBee第二定位模块收到定位终端发送数据的时刻;T′s为ZigBee 第二定位模块向定位终端发送回复数据的时刻;T′r为定位终端收到ZigBee第二定位模块 发送回复数据的时刻;C为电磁波在介质中的传播速度。 进一步,步骤S4中,所述UWB定位模式采用SDS-TWR测距算法确定定位终端分别与 第一定位基站和第二定位基站之间的距离,并根据所述距离计算得到定位终端的位置。 进一步,确定定位终端分别与第一定位基站和第二定位基站之间的距离,具体包 括: S41.确定定位终端与第一定位基站的距离d1′; 所述距离 其中,T1为定位终端向第一 定位基站发送数据的时刻;T2为第一定位基站收到定位终端发送数据的时刻;T3为第一定位 基站向定位终端发送回复数据的时刻;T4为定位终端收到第一定位基站发送回复数据的时 刻;T5为定位终端再次向第一定位基站发送数据的时刻;T6为第一定位基站再次收到定位终 端发送数据的时刻;C为电磁波在介质中的传播速度; S42.确定定位终端与第二定位基站的距离d2′; 所述距离 其中,T7为定位终端向 第二定位基站发送数据的时刻;T8为第二定位基站收到定位终端发送数据的时刻;T9为第二 定位基站向定位终端发送回复数据的时刻;T10为定位终端收到第二定位基站发送回复数据 的时刻;T11为定位终端再次向第二定位基站发送数据的时刻;T12为第二定位基站再次收到 定位终端发送数据的时刻;C为电磁波在介质中的传播速度。 进一步,步骤S4还包括:在进行UWB定位前,判断若干个定位终端向定位基站发送 5 CN 111586838 A 说 明 书 3/6 页 入网广播帧时,所述入网广播帧之间是否会发生碰撞,若是,则设定若干个定位终端随机延 迟发送入网广播帧,若否,则开始UWB定位。 本发明的有益效果是:本发明公开的一种煤矿井下精确定位方法,通过基于RFID、 Zigbee和UWB相融合的定位方法,定位终端可发送RFID信号、ZigBee信号和UWB信号,在定位 基站覆盖的范围内,定位终端遇到RFID读卡器时,进行区域定位,遇到ZigBee读卡器时,采 用ZigBee方式进行精确定位,遇到UWB信号时,自动切换到UWB模式下进行精准定位,能够自 适应地测算设置有定位终端的目标体在煤矿井下的位置,适用性好、定位精度高、定位成本 低。 附图说明 下面结合附图和实施例对本发明作进一步描述: 图1为本发明的方法流程示意图; 图2为本发明的定位装置示意图。











