
技术摘要:
本发明涉及一种基于目标特征训练的抽油机识别方法与系统,包括图像获取模块,用于获取红外周视图像并转化为监测标识模块的图像输入源;监测标识模块,用于处理获取到红外图像输入,检测红外图像中的抽油机,并基于深度学习对抽油机的位置与工作形态进行标识;状态分析模 全部
背景技术:
抽油机工作状态检测识别在油田检测中扮演着重要的角色,通过检测抽油机工作 是否处于工作状态,可以对抽油机本身故障,抽油机工作起停时周围环境安全状态等进行 有效的检测,保障油田生产的安全。 抽油机工作状态的传统检测模式分为两种,一种通过系统集成传感器检测抽油机 工作状态,该模式的缺点是无法获取抽油机无图像,不直观;另一种通过图像检测,采用光 电观测转台,对每个抽油机进行凝视检测,该模式的缺点是速度慢,需要事先标定抽油机位 置。
技术实现要素:
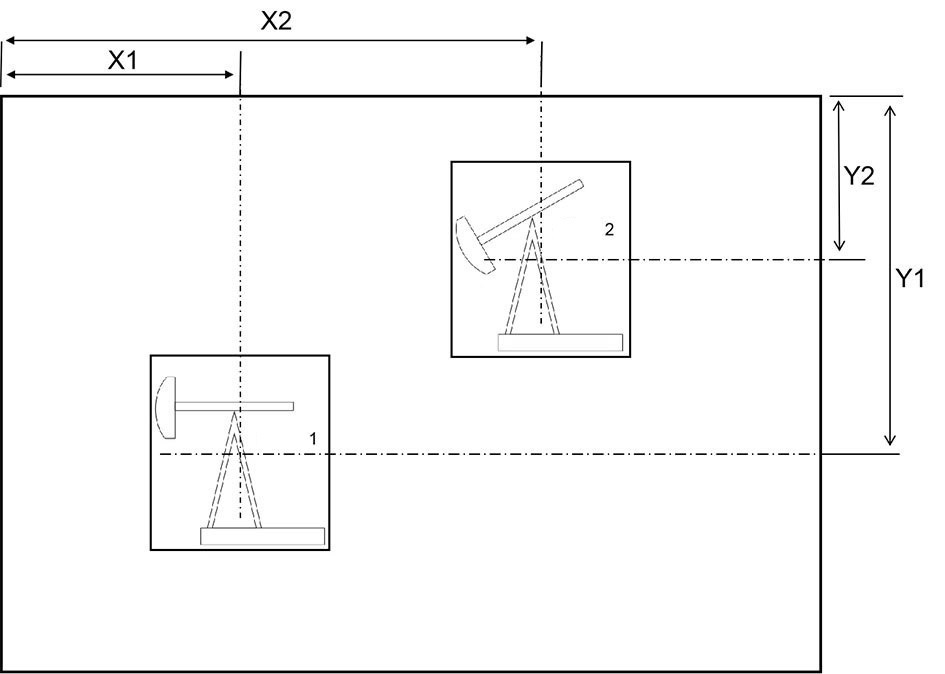
为提高抽油机工作状态检测识别的效率和效果,本发明提供一种基于目标特征训 练的抽油机识别方法与系统,通过对抽油机进行智能标识,动态的获取了井网内抽油机的 位置与工作形态,使得抽油机工作状态的识别更加准确,获得了更好的检测效果。 为达到上述目的,本发明提供了一种基于目标特征训练的抽油机识别方法,包括 以下步骤: 步骤1、周视图像获取,获取待检测抽油机的相关红外周视图像,将待识别红外周视图 像进行拆解处理; 步骤2、周视图像映射,将拆分的图像重新映射为智能图像识别模块所能接收的像素数 据位宽和分辨率; 步骤3、抽油机样本标注,在预先获取的样本图像数据集中对不同状态的抽油机进行标 注,标注分为形态标注和/或位置标注; 步骤4、目标识别模型训练,将步骤3中样本图像数据集及其标注的目标标注框参数输 入目标识别模型进行训练,训练基于深度学习的目标识别计算框架,目标识别模型为多层 卷积神经网络; 步骤5、目标识别模型部署,将步骤4中训练所得的目标识别模型部署在目标智能识别 模块内; 步骤6、目标分析与判定,目标分析判定模块接收多帧同一视野的图像,根据目标智能 识别模块输出周视单帧静态图像中的目标位置和静止形态,对抽油机目标的静止图像进行 相同目标的匹配和目标状态的判定,完成抽油机工作状态的识别检测。 进一步地,所述步骤1包括步骤1.1、红外周扫设备转动,将成像的红外图像按照帧 序列拼接为全景图像以生成包括360度视场的红外周视图像;步骤1.2、周视图像拆解,将红 外周视图像拆分为单帧图像。 4 CN 111611953 A 说 明 书 2/8 页 进一步地,所述步骤2中,采用直方图线性均衡法将原始单帧红外周视14位图像转 化为8位数字图像。 进一步地,所述步骤3中,形态类别标注分为三类:抽油机低头,抽油机平态,抽油 机抬头,游梁处于倾斜状态时,驴头重心低于游梁的水平位置标注为抽油机低头,驴头重心 高于游梁的水平位置标注为抽油机抬头,驴头重心位于游梁的水平位置标注为抽油机平 态。 进一步地,所述步骤3中,设置抽油机所在图像区域为目标标注框,位置标注包括: H为目标标注框的垂直高度,W为目标标注框的水平宽度,X为目标标注框中心在目标视图框 中的水平位置,Y为目标标注框中心在目标视图框中的垂直位置。 进一步地,所述步骤3中,设置抽油机所在图像区域为目标标注框,样本图像中具 有 一 个 或 者 多 个 目 标 标 注 框 ,抽 油 机 样 本 标 注 包 括 :目 标 标 注 框 参 数 ,其中k为实数,表示目标标注框的序号,Ck表示目标的形态类别, 目标的形态类别分为抽油机低头、抽油机平态、抽油机抬头三类,Hk,Wk分别表示目标标注框 的垂直高度与水平宽度,Xk ,Yk分别表示目标标注框中心在目标视图框中的横坐标与纵坐 标。 进一步地,所述步骤4包括步骤4.1、通过将已标注目标的图像通过多层神经网络 的计算获得相应的特征向量;步骤4.2、多层神经网络计算所得的特征向量通过损失函数进 行前向计算得到相应的损失值;步骤4.3、通过随机梯度下降的方法,调整权重系数,并将标 注好的数据集重复输入进模型进行后向迭代计算,最终获得使得损失值最小的最优化权重 系数;步骤4.4、训练完成后导出训练所得具有最优权重系数的目标识别模型。 进一步地,所述步骤6包括步骤6.1、将前后两幅图像提取所得的目标进行两两匹 配,目标标注框重合度满足阈值e的两个目标认定为同一目标;步骤6.2、对同一目标先后的 状态变化进行识别分析,从而得到目标的工作状态,连续分析同一方向的多帧图像,状态持 续变化的判定为工作状态,状态维持不变的判定为静止状态。 优选地,所述步骤6中,根据目标智能识别模块识别输出目标标注框参数 ,计 算 前 后 两 幅 图 像 中 目 标 标 注 框 参 数 的 重 合 度 R = ,其中,k为实数,表示目标标注框的序 号,Hk,Wk分别表示目标标注框的垂直高度与水平宽度,Xk,Yk分别表示目标标注框中心在目 标视图框中的横坐标与纵坐标,a,b,c为训练权重系数,如果重合度R在设定阈值范围内,则 确认两幅图像的两个目标为同一目标;否则,选择第k幅图像与第k 2幅图像进行重合度计 算,进行目标匹配。 优选地,所述步骤6中,根据目标智能识别模块识别输出目标标注框参数 ,判断同一方向的前后图像的目标标注框参数Ck与Ck 1,如果参数 相同,则判定为静止状态;否则判定为工作状态。 本发明另一方面提供一种基于目标特征训练的抽油机识别系统,包括周视图像获 取模块,周视图像映射模块,目标智能识别模块,目标分析判定模块;周视图像获取模块接 5 CN 111611953 A 说 明 书 3/8 页 收来自红外周视系统的红外全景周视图像,按照周扫帧序列将周视图像拆分为单帧图像; 周视图像映射模块将拆分的图像重新映射为智能图像识别模块所能接收的像素数据位宽 和分辨率;对抽油机不同的工作状态进行分类标定,基于深度学习进行识别训练以得到具 有最优权重系数的针对分类标定识别的目标识别模型,目标识别模型部署运行于目标智能 识别模块内;目标分析判定模块接收多帧同一视野的图像,根据目标智能识别模块输出周 视单帧静态图像中的目标位置和静止形态,对抽油机目标的静止图像进行相同目标的匹配 和目标状态的判定,完成抽油机工作状态的识别检测。 进一步地,所述目标智能识别模块对抽油机的分类标定包括形态标注和/或位置 标注,形态类别标注为抽油机低头、抽油机平态、抽油机抬头三类,位置标注为目标标注框 的高度、宽度,目标标注框在目标视图框中的横坐标与纵坐标。 本发明的上述技术方案具有如下有益的技术效果: (1)本发明基于红外光电检测的方式,能够利用周扫设备获取待检测单井或者井网内 全部抽油机的相关周视图像,无需对每个抽油机进行凝视检测,也不需要事先标定抽油机 位置,能够批量检测识别多台抽油机,大大提高了检测识别的效率;通过红外周视图像的重 新映射,进行图像大小重新映射更加匹配图像识别模块的输入,不仅可以缩减图像处理的 计算量,还能够根据目标需要,增强图像局部特征的对比度,提高分辨效率。 (2)本发明根据游梁的位置标注,能够准确表示抽油机的工作状态,降低了图像数 据计算的复杂度;通过目标标注框的大小和坐标标注,能够根据目标标注框的大小,反映距 离参数维度,并进行噪音识别排除与多模式形态标注分类,具有目标识别的准确度高,图像 噪音小,识别类型多样的技术效果;此外,通过形态标注和/或位置标注,可实现多目标定 位,标注效率高,识别可靠性强。 (3)本发明目标识别模型通过多层卷积深度神经网络进行迭代运算训练,对计算 模型进行前向和后向双向运算,获取合理损失值与最优权重系数,同时,目标智能识别模块 利用训练所得的模型和权重系数对输入的拆分后的多幅红外图像进行正向推理运算,能够 高效而准确的提取出图像中所包含的指定目标与目标参数。 (4)本发明目标分析判定模块接收同一目标在时间序列中的状态变化,分析判定 待识别目标的工作状态,通过将前后两幅图像提取的目标进行目标标注框重合度匹配,可 有效区分识别同一目标,连续分析同一方向的多帧图像同一目标先后的状态变化,能够有 效可靠的判定目标的工作状态。 附图说明 图1为基于红外光电检测的抽油机识别方法的流程图; 图2为红外周视图像拆解的示意图; 图3为抽油机形态类别标注的示意图;其中图3(a)为抽油机低头形态的图像,图3(b)为 抽油机平态形态的图像,图3(c)为抽油机抬头形态的图像; 图4为抽油机位置标注的示意图; 图5为抽油机样本标注的示意图。 6 CN 111611953 A 说 明 书 4/8 页











