
技术摘要:
本发明提供一种无人车及清障方法,无人车用于道路清障,包括车体,还包括电磁吸附件以及金属物品回收装置,电磁吸附件设于车体底部,金属物品回收装置包括接收端口,接收端口用于接收从电磁吸附件上掉落的金属物品。无人车在道路上行驶过程中,电磁吸附件通电后产生电 全部
背景技术:
道路清洁车作为环卫设备之一,是一种集路面清扫、垃圾回收和运输为一体的新 型高效清扫设备。可应用于干线公路,市政、城市住宅区、公园等道路清扫。目前用清洁车进 行路面养护已经成为一种潮流。 道路清障车是配有扫刷,转盘、磁吸器等清扫系统的专用环卫车辆,主要用于城市 环卫部门进行清扫,清障作业工作。道路清障车极大地解决了环卫工人的工作强度,提高了 工作效率。现有扫地车工作效率低下,很难对掉落在道路上的金属、铁屑、螺钉等物品进行 清除,难以满足现有人的需要。
技术实现要素:
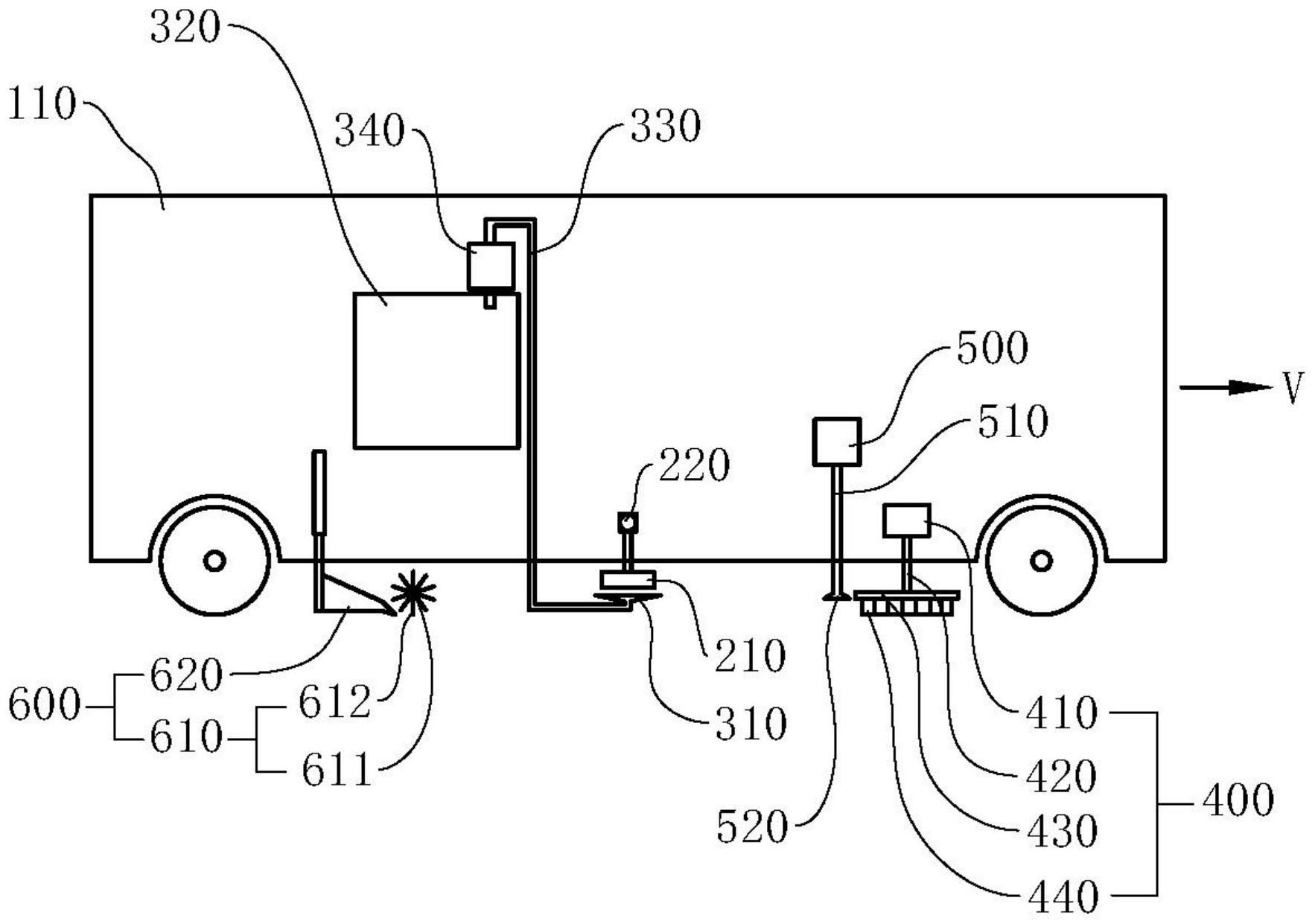
本申请目的是提供一种无人车及清障方法,用以解决现有技术中道路清障车难以 对掉落在道路上的金属、铁屑、螺钉等物品进行清除的问题。 因此,在本申请的第一方面中,提供一种无人车,用于道路清障,包括车体,还包括 电磁吸附件以及金属物品回收装置,所述电磁吸附件设于所述车体底部,所述金属物品回 收装置包括接收端口,所述接收端口用于接收从所述电磁吸附件上掉落的金属物品。 本申请第一方面提供的无人车,无人车在道路上行驶过程中,电磁吸附件通电后 产生电磁吸附力,将路面上的铁、钴、镍等金属物品吸附起来,电磁吸附件完成吸附金属物 品后,电磁吸附件运动至接收端口内部或运动至接收端口的接收区域内,例如接收端口的 入口朝上,则电磁吸附件运动至接收端口的正上方,或接收端口运动至电磁吸附件伸入接 收端口内部或接收端口的接收区域内,然后电磁吸附件断电失去磁性吸附力,电磁吸附件 吸附的金属物品在重力作用下掉入至接收端口内进行回收。相对于现有技术中的清洁车, 能够将路面上的铁屑、螺钉、等金属物品清除,使路面更加清洁。电磁吸附件采用电磁铁。 在本申请第一方面的一种可能的实施方式中,还包括驱动装置,所述驱动装置与 所述电磁吸附件传动连接,所述驱动装置用于驱动所述电磁吸附件运动进出所述接收端口 的接收区域。 通过本申请第一方面的上述可能的实施方式,在电磁吸附件对路面上的金属物品 进行吸附时,驱动装置驱动电磁吸附件运动至接收端口的接收区域外侧,以便于路面上的 金属物品吸附至电磁吸附件上,电磁吸附件完成吸附金属物品后,驱动装置驱动电磁吸附 件运动至接收端口的接收区域内,电磁吸附件断电,被吸附的金属物品掉入至接收端口内, 实现对路面上的金属物品进行自动吸附和自动回收。 在本申请第一方面的一种可能的实施方式中,所述接收端口低于所述电磁吸附 件,所述驱动装置用于驱动所述电磁吸附装置运动进出所述接收端口的正上方。 通过本申请第一方面的上述可能的实施方式,在电磁吸附件对路面上的金属物品 3 CN 111576310 A 说 明 书 2/7 页 进行吸附时,驱动装置驱动电磁吸附件运动至接收端口正上方区域的外侧,避免接收端口 遮挡被电磁吸附件吸起的金属物品,电磁吸附件完成吸附金属物品后,驱动装置驱动电磁 吸附件运动至接收端口的正上方区域内侧,电磁吸附件断电,被吸附的金属物品掉入至接 收端口内, 在本申请第一方面的一种可能的实施方式中,所述电磁吸附件具有两组,所述驱 动装置用于驱动两组所述电磁吸附件分别沿所述车体宽度方向运动相互靠近合拢或相互 远离张开。 通过本申请第一方面的上述可能的实施方式,电磁吸附件合拢时位于车体底部的 中间位置,工作时,驱动装置驱动两组电磁吸附件张开,两组电磁吸附件分别对车体两侧边 附近的地面上的金属物品进行吸附,两组电磁吸附件能够增大吸附面积,提升吸附效果,吸 附完成后合拢,掉电后吸附的金属物品掉落至接收端口。 在本申请第一方面的一种可能的实施方式中,所述金属物品回收装置还包括回收 箱和输送线,所述输送线一端与所述接收端口连接,所述输送线另一端与所述回收箱连接, 所述输送线用于将所述接收端口接收的金属物品输送至所述回收箱内。 通过本申请第一方面的上述可能的实施方式,电磁吸附件吸附的金属物品掉落至 接收端口后,输送线将金属物品输送至回收箱内,完成对金属物品的自动回收。 在本申请第一方面的一种可能的实施方式中,所述输送线包括输送管和抽风机, 所述抽风机与所述输送管连接,所述输送管两端口分别与所述回收箱以及所述接收端口连 接。 通过本申请第一方面的上述可能的实施方式,接收端口可设置为漏斗状结构,接 收端口较大的一端朝上作为入口,较小的一端朝下作为出口,输送管入口与接收端口的出 口连通,抽风机用于对输送管的入口抽风并将输送管内的空气从输送管的出口排出,输送 管的出口伸入回收箱,工作过程中,金属物品掉落至接收端口,抽风机将接收端口内的金属 物品吸入输送管,然后将输送管内的金属物品排入至回收箱内,实现金属物品的自动回收。 在本申请第一方面的一种可能的实施方式中,还包括设于所述车体底部的电动 刷,所述电动刷用于刷洗路面。 通过本申请第一方面的上述可能的实施方式,电动刷包括电机、伸缩杆、转盘和毛 刷,电机安装在车体上,伸缩杆一端与电机的输出轴传动连接,伸缩杆另一端与转盘固定连 接,转盘水平设置,毛刷固定连接在转盘的下表面,刷洗路面时,伸缩杆伸长带动转盘下降 至毛刷接触地面,电机带动转盘旋转,从而驱动毛刷对地面进行刷洗,当金属物品粘在路面 上时,电动刷可以将金属物品从路面上剥离或减小金属物品与路面之间的粘结强度,便于 电磁吸附件将金属物品吸起。 在本申请第一方面的一种可能的实施方式中,还包括吸尘器,所述吸尘器用于吸 取收集所述电动刷附近扬起的灰尘。 通过本申请第一方面的上述可能的实施方式,吸尘器的入口连接有吸尘管,吸尘 管远离吸尘器的一端设有吸尘口,吸尘口伸向毛刷附近,工作时,毛刷刷洗路面并扬起灰 尘,吸尘器通过吸尘管从吸尘口抽气,将毛刷附近扬起的灰尘吸入,避免灰尘扬起扩散至无 人车底部区域外侧的空气中。 在本申请第一方面的一种可能的实施方式中,包括垃圾清扫装置,所述清扫装置 4 CN 111576310 A 说 明 书 3/7 页 位于所述电磁吸附件远离所述无人车的车头的一侧; 所述垃圾清扫装置包括电动扫把和铲斗,所述铲斗的入口朝向所述电动扫把。 通过本申请第一方面的上述可能的实施方式,经过刷洗后的路面灰尘量减少,电 动扫把将剩下的垃圾例如树叶、纸屑、饮料瓶等扫入铲斗,由于垃圾清扫装置位于电磁吸附 件远离无人车的车头的一侧,无人车前进过程中,电磁吸附件可以先将路面上的金属物品 吸附掉,可以对垃圾进行分类收集回收。电动扫把包括电动辊筒和固定在电动辊筒圆柱面 上的刷毛,电动辊筒的中心轴线水平且沿车体的宽度方向设置,电动辊筒旋转时,刷毛将地 面上的垃圾扫入铲斗。 在本申请的第二方面中,提供一种清障方法,应用本申请第一方面中的所述无人 车,包括如下步骤: 启动所述无人车和电磁吸附件,其中所述电磁吸附件启动后具有金属吸附力; 周期性地控制所述电磁吸附件移动到金属品回收装置的接收端口的正上方; 使所述电磁吸附件断电而失去吸附力; 控制所述电磁吸附件回到原位。 附图说明 为了更清楚地说明本申请的实施方式或现有技术中的技术方案,下面将对实施方 式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅 仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图引伸获得其它的实施附图。 图1是本申请实施例一的结构示意图; 图2是本申请实施例一中电磁吸附件合拢状态的结构示意图; 图3是本申请实施例一中电磁吸附件张开状态的结构示意图; 图4是本申请实施例二中清障方法的流程示意图。 附图标记说明: 110、车体; 210、电磁吸附件;220、驱动装置; 310、接收端口;320、回收箱;330、输送管;340、抽风机; 400、电动刷;410、电机;420、伸缩杆;430、转盘;440、毛刷; 500、吸尘器;510、吸尘管;520、吸尘口; 600、清扫装置;610、电动扫把;611、电动辊筒;612、刷毛;620、铲斗。











