
技术摘要:
本发明属于机械技术领域,具体为一种复杂空间孔系编程的点位计算方法,提供系统性计算方法来完成各类五轴加工设备的空间点位确定。本发明的方法使用UG等相关三维软件按照不同五轴的转轴特点逐步分析、计算、确定复杂空间点位的标准步骤与计算方法来确定程序的点位,完 全部
背景技术:
机匣类零件存在多角度的油路孔、衬套孔、销子孔,其中部分孔要求位置度高,除 了订制专用工装进行加工外,必然要使用五轴设备多次旋转角度进行加工。 零件设计图多附带三维数模,可直接进行点位确定,然而有部分零件只附带设计 图而无三维数模。设计图只针对所加工的孔位给出剖视位置、剖视角度、高度距离等尺寸, 需要加工是按照设计图位置寻找该点进行加工;同时某些复杂零件的局部点位补充加工也 依然需要准确找出并加工。 五轴加工中心可完成多角度加工,完全可以加工所需加工的任何点位,然而市面 上的五轴轴向的旋转方式各不相同,如绕X、Y轴旋转,X、Z轴旋转或Y、Z轴旋转,使用不同转 轴设备确定空间点位必然存在不同的计算方法。 现阶段空间点位的计算多在大脑中先构造形态,再辅助相关软件进行空间点位的 计算,因5轴机床转轴各不相同,加工点位的确定方式各不相同,无系统性计算方法,导致其 点位确定耗时长,点位计算错误率高。
技术实现要素:
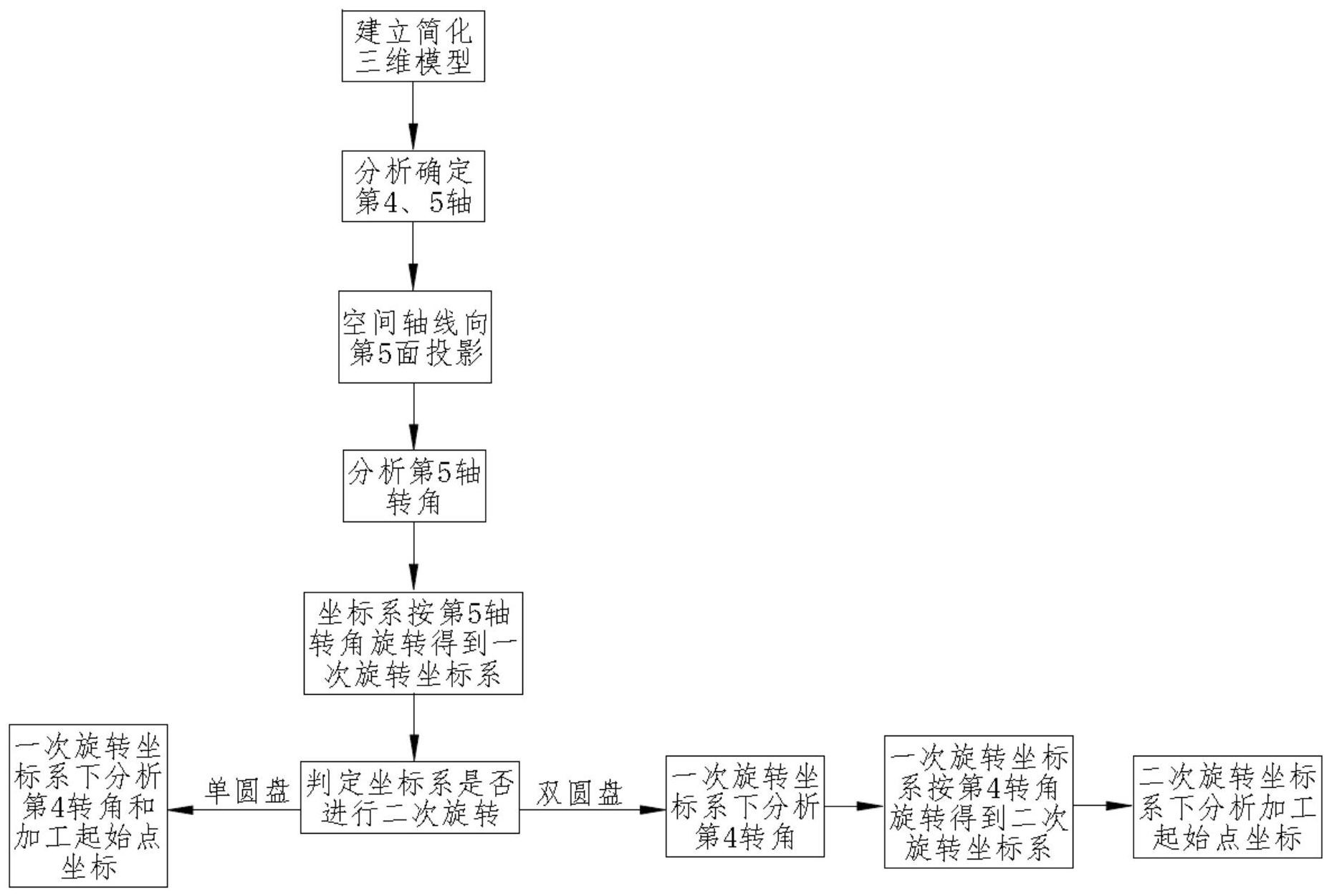
: 本发明的目的是:研究并使用一种系统性计算方法来完成各类五轴加工设备的空 间点位确定。即使用UG等相关三维软件按照不同五轴的转轴特点逐步分析、计算、确定复杂 空间点位的标准步骤与计算方法来确定程序的点位,完成程序的编制。 本发明具有优点:计算过程规范化,适用于各类五轴设备空间点位的确定,算点效 率高,点位正确率高。 复杂空间孔系编程的点位计算方法,具体步骤如下: 步骤一、运用软件和右手定则建立简化三维模型,所述软件具备坐标系平移旋转 功能; 步骤二、按机床种类,包括单圆盘、双圆盘,分析确定第4、5轴; 步骤三、空间轴线向第5面投影,分析其投影线与共有轴的夹角;与第5轴平行的平 面为第5轴投影面,简称第5面;与第4轴平行的平面为第4轴投影面,简称第4面;第4面和第5 面的交线为共有轴; 步骤四、按右手螺旋定则判定角度正负得到第5轴转角值; 步骤五、编程坐标系按第5轴转角旋转得到一次旋转坐标系; 步骤六、根据步骤二机床种类,分析是否对坐标系进行第二次旋转。 步骤七、单圆盘:一次旋转坐标系下分析第4轴转角及加工起始点。 双圆盘:分析空间轴线与一次旋转坐标系的Z轴夹角;按右手定则判定正负得到第 3 CN 111580467 A 说 明 书 2/2 页 4轴转角;一次旋转坐标系绕第4轴旋转使其Z轴与空间轴线平行,得到二次旋转坐标系,二 次旋转坐标系分析得到加工起始点。 本发明的有益效果是: 使用UG等相关三维软件按照不同五轴的转轴特点逐步分析、计算、确定复杂空间 点位的标准步骤与计算方法来确定程序的点位,完成程序的编制。本发明使五轴算点计算 过程规范化,适用于各类五轴设备空间点位的确定,算点效率高,点位正确率高,具有通用 性。 附图说明 图1为复杂空间孔系编程的点位计算方法流程图











