
技术摘要:
提供一种控制装置、输送装置、记录介质以及控制方法。控制装置具备:力觉信息获取部,其在正在输送对象物品的期间内获取表示操纵器的远端处的力和转矩中的至少一方的大小的力觉信息;质量信息获取部,其获取表示作为对象物品的质量而预先决定的值的质量信息;计划信息 全部
背景技术:
已知一种使用机械臂来移载物品的移载装置(例如,期望参照专利文献1和非专利 文献1)。 现有技术文献 非专利文献 非专利文献1:株式会社石田,“ダイナミック計量システムIMAS-G,”[Online], [2019年7月15日检索],因特网
技术实现要素:
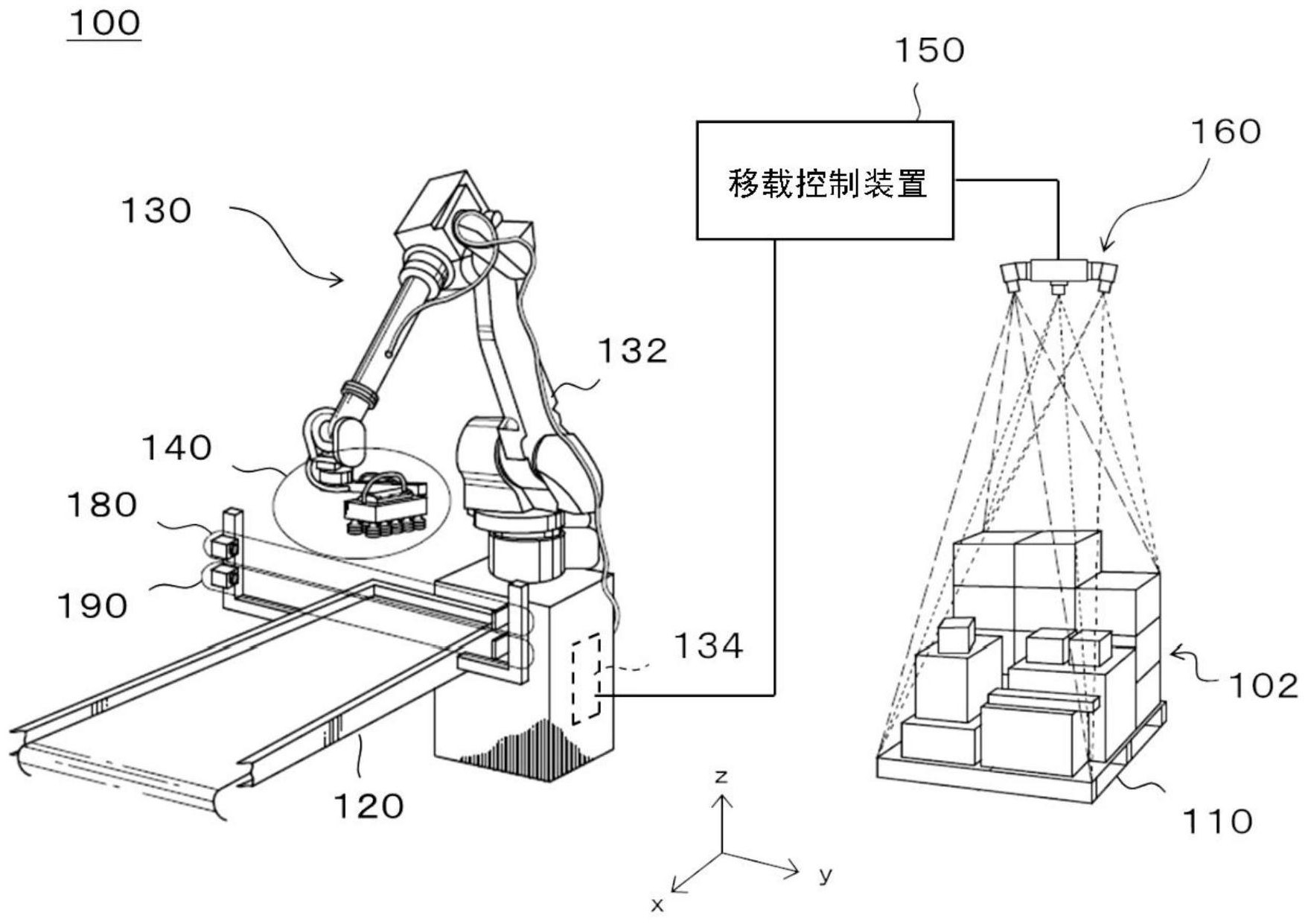
发明要解决的问题 在移载工件的过程中,有时产生工件的破损、掉落等各种异常。因此,期望的是,更 加迅速且高精度地探测与工件的移载有关的异常。 用于解决问题的方案 在本发明的第一方式中,提供一种控制装置。上述的控制装置例如具备力觉信息 获取部,在正在输送作为被操纵器输送的对象的对象物品的期间内,该力觉信息获取部获 取力觉信息,该力觉信息表示操纵器的远端处的力和转矩中的至少一方的大小。上述的控 制装置例如具备质量信息获取部,该质量信息获取部获取质量信息,该质量信息表示作为 对象物品的质量而预先决定的值。上述的控制装置例如具备计划信息获取部,该计划信息 获取部获取计划信息,该计划信息表示与操纵器的远端以及配设于远端的用于把持对象物 品的把持部中的至少一方的轨道有关的计划的内容。上述的控制装置例如具备力觉估计 部,该力觉估计部基于质量信息和计划信息,来估计在操纵器输送对象物品的情况下在操 纵器的远端处检测到的力和转矩中的至少一方的大小。上述的控制装置例如具备第一探测 部,该第一探测部基于力觉信息所表示的力和转矩中的至少一方的大小、以及力觉估计部 估计出的力和转矩中的至少一方的大小,来探测与对象物品的输送有关的异常。 在上述的控制装置中,力觉信息可以表示操纵器的远端处的力和转矩中的至少一 方的大小和方向。在上述的控制装置中,力觉估计部可以估计操纵器的远端处的力和转矩 中的至少一方的大小和方向。在上述的控制装置中,第一探测部可以基于力觉信息所表示 的力和转矩中的至少一方的大小和方向、以及力觉估计部估计出的力和转矩中的至少一方 的大小和方向,来检测与对象物品的输送有关的异常。 6 CN 111571593 A 说 明 书 2/26 页 在上述的控制装置中,第一探测部可以在力觉信息所表示的力和转矩中的至少一 方的大小与力觉估计部估计出的力和转矩中的至少一方的大小之差的绝对值大于第一阈 值的情况下探测出异常。在上述的控制装置中,第一探测部可以在力觉信息所表示的力和 转矩中的至少一方的大小与力觉估计部估计出的力和转矩中的至少一方的大小之差的绝 对值大于第一阈值的状态的持续期间的长度大于第二阈值的情况下探测出异常。在上述的 控制装置中,第一阈值可以是以如下方式决定的:与力觉信息获取部对力觉信息的获取有 关的延迟时间的长度越大,则第一阈值越大。 在上述的控制装置中,力觉信息可以包含表示多个时刻的信息以及表示各时刻下 的远端处的力和转矩中的至少一方的大小的信息。在上述的控制装置中,计划信息可以包 含表示从对象物品通过轨道上的基准位置起的多个经过时间的信息、以及表示各经过时间 下的操纵器中包括的多个关节各自的角度的信息。在上述的控制装置中,力觉估计部可以 基于计划信息,来估计多个经过时间中的各经过时间下的、在远端处检测到的力和转矩中 的至少一方的大小。力觉估计部可以输出将多个经过时间中的各经过时间与所估计出的力 和转矩中的至少一方的大小进行对应而得到的估计信息。在上述的控制装置中,第一探测 部可以基于力觉信息所包含的表示多个时刻的信息以及估计信息所包含的表示多个经过 时间中的各经过时间的信息,来将力觉信息所包含的表示力和转矩中的至少一方的大小的 信息与估计信息所包含的表示力和转矩中的至少一方的大小的信息进行对应。第一探测部 可以基于已被对应的力觉信息所包含的表示力和转矩中的至少一方的大小的信息以及估 计信息所包含的表示力和转矩中的至少一方的大小的信息,来探测与对象物品的输送有关 的异常。 上述的控制装置可以具备角度信息获取部,该角度信息获取部获取角度信息,该 角度信息表示操纵器中包括的多个关节各自的角度。在上述的控制装置中,角度信息可以 包含表示多个时刻的信息以及表示各时刻下的多个关节各自的角度的信息。在上述的控制 装置中,力觉信息可以包含表示多个时刻的信息以及表示各时刻下的远端处的力和转矩中 的至少一方的大小的信息。在上述的控制装置中,力觉估计部可以基于计划信息,来决定轨 道上的多个位置中的各位置处的多个关节各自的角度。力觉估计部可以估计轨道上的多个 位置中的各位置处的、在远端处检测到的力和转矩中的至少一方的大小。力觉估计部可以 输出将多个关节各自的角度与所估计出的力和转矩中的至少一方的大小进行对应而得到 的估计信息。在上述的控制装置中,第一探测部可以基于角度信息所包含的表示多个时刻 的信息和力觉信息所包含的表示多个时刻的信息,来将表示多个关节各自的角度的信息与 表示远端处的力和转矩中的至少一方的大小的信息进行对应。第一探测部可以基于表示多 个关节各自的角度的信息,来将力觉信息所包含的表示力和转矩中的至少一方的大小的信 息与估计信息所包含的表示力和转矩中的至少一方的大小的信息进行对应。第一探测部可 以基于已被对应的力觉信息所包含的表示力和转矩中的至少一方的大小的信息以及估计 信息所包含的表示力和转矩中的至少一方的大小的信息,来探测与对象物品的输送有关的 异常。 在上述的控制装置中,与对象物品的输送有关的异常可以是对象物品的识别不 良、对象物品的把持不良、对象物品的掉落、对象物品的破损、以及对象物品的撞击中的至 少一个。 7 CN 111571593 A 说 明 书 3/26 页 上述的控制装置可以具备减压信息获取部,该减压信息获取部获取减压信息,该 减压信息表示配设于把持部的减压室的内部的压力的大小。在上述的控制装置中,第一探 测部可以在(i)未探测出与减压信息所表示的压力有关的异常以及与力觉信息所表示的对 象物品的质量有关的异常、且(ii)探测出与力觉信息所表示的对象物品的重心有关的异常 的情况下,探测出对象物品的破损。 上述的控制装置可以具备图像信息获取部,该图像信息获取部获取对象物品被操 纵器把持之前的时间点下的对象物品的图像数据。上述的控制装置可以具备重心估计部, 该重心估计部基于图像数据来估计对象物品的重心位置。上述的控制装置可以具备把持位 置决定部,该把持位置决定部决定把持部把持对象物品的把持位置。在上述的控制装置中, 力觉估计部可以基于质量信息所表示的对象物品的质量、重心估计部估计出的对象物品的 重心位置、以及把持位置决定部所决定的把持位置,来估计在把持部把持对象物品的把持 位置来举起对象物品的情况下在远端处检测到的力和转矩中的至少一方的大小。在上述的 控制装置中,第一探测部可以基于力觉信息所表示的力和转矩中的至少一方的大小、以及 力觉估计部估计出的力和转矩中的至少一方的大小,来探测对象物品的识别不良、对象物 品的把持不良、以及对象物品的破损中的至少一个。 上述的控制装置可以具备图像信息获取部,该图像信息获取部获取对象物品被操 纵器把持之前的时间点下的对象物品的图像数据。上述的控制装置可以具备几何中心确定 部,该几何中心确定部基于图像数据来确定对象物品的上表面的几何中心的位置。上述的 控制装置可以具备把持位置决定部,该把持位置决定部决定把持部把持对象物品的把持位 置。上述的控制装置可以具备重心确定部,该重心确定部基于(i)在把持部把持对象物品的 把持位置来举起对象物品的情况下力觉信息所表示的力和转矩中的至少一方的大小、以及 (ii)对象物品的把持位置,来确定对象物品的重心位置。上述的控制装置可以具备第二探 测部,该第二探测部在对象物品的上表面的几何中心的位置与将对象物品的重心投影到对 象物品的上表面而得到的位置之间的距离大于第三阈值的情况下,探测出对象物品的识别 不良、对象物品的把持不良、以及对象物品的破损中的至少一个。 上述的控制装置可以具备图像信息获取部,该图像信息获取部获取对象物品被操 纵器把持之前的时间点下的对象物品的图像数据。上述的控制装置可以具备几何中心确定 部,该几何中心确定部基于图像数据来确定对象物品的上表面的几何中心的位置。上述的 控制装置可以具备把持位置决定部,该把持位置决定部决定把持部把持对象物品的把持位 置。上述的控制装置可以具备重心确定部,该重心确定部基于(i)在把持部把持对象物品的 把持位置来举起对象物品的情况下力觉信息所表示的力和转矩中的至少一方的大小、以及 (ii)对象物品的把持位置,来确定对象物品的重心位置。在上述的控制装置中,把持位置决 定部可以在对象物品的上表面的几何中心的位置与将对象物品的重心投影到对象物品的 上表面而得到的位置之间的距离大于第三阈值的情况下,决定作为对象物品的把持位置而 言更适当的位置。 上述的控制装置可以具备第三探测部,该第三探测部在(i)在把持部举起对象物 品的情况下基于力觉信息所表示的力和转矩中的至少一方的大小来决定的对象物品的质 量与(ii)质量信息所表示的对象物品的质量之差的绝对值大于第四阈值的情况下,探测出 对象物品的识别不良、对象物品的把持不良、以及对象物品的破损中的至少一个。上述的控 8 CN 111571593 A 说 明 书 4/26 页 制装置可以具备调整部,该调整部在第一探测部探测出异常的情况下,决定调整对象物品 的输送速度。。 在本发明的第二方式中,提供一种输送装置。上述的输送装置例如具备上述的第 一方式所涉及的各种控制装置。上述的输送装置例如具备操纵器。 在本发明的第三方式中,提供一种控制方法。上述的控制方法例如具有力觉信息 获取阶段,在该力觉信息获取阶段中,在正在输送作为被操纵器输送的对象的对象物品的 期间内,获取力觉信息,该力觉信息表示操纵器的远端处的力和转矩中的至少一方的大小。 上述的控制方法例如具有质量信息获取阶段,在该质量信息获取阶段中,获取质量信息,该 质量信息表示作为对象物品的质量而预先决定的值。上述的控制方法例如具有计划信息获 取阶段,在该计划信息获取阶段中,获取计划信息,该计划信息表示与操纵器的远端以及配 设于远端的用于把持对象物品的把持部中的至少一方的轨道有关的计划的内容。上述的控 制方法例如具有力觉估计阶段,在该力觉估计阶段中,基于质量信息和计划信息,来估计在 输送对象物品的情况下在操纵器的远端处检测到的力和转矩中的至少一方的大小。上述的 控制方法例如具有第一探测阶段,在该第一探测阶段中,基于力觉信息所表示的力和转矩 中的至少一方的大小、以及在力觉估计阶段估计出的力和转矩中的至少一方的大小,来探 测与对象物品的输送有关的异常。 在本发明的第四方式中,提供一种程序。也可以提供一种保存上述的程序的非暂 时性计算机可读介质。上述的程序可以是用于使计算机作为上述的第一方式所涉及的各种 控制装置来发挥功能的程序。上述的程序可以是用于使计算机执行上述的第三方式所涉及 的控制方法的程序。 此外,上述的发明的概要并未列举本发明所需的全部特征。另外,这些特征组的子 组合也能够成为发明。 附图说明 图1概要性地表示移载系统100的系统结构的一例。 图2概要性地表示机器人130的系统结构的一例。 图3概要性地表示把持构件246的一例。 图4概要性地表示移载控制装置150的内部结构的一例。 图5概要性地表示移载控制部436的内部结构一例。 图6概要性地表示把持构件246的轨道的一例。 图7概要性地表示异常探测部544的内部结构的一例。 图8概要性地表示变更部546的内部结构的一例。 图9概要性地表示移载系统100所进行的移载处理的一例。 图10概要性地表示计算机3000的内部结构的一例。











