
技术摘要:
本申请涉及一种基于双目立体视觉的三维信息获取方法和装置。所述方法包括:基于双目立体视觉的三维信息获取方法,所述方法包括:获取双目图像;对所述双目图像进行水平滤波处理,得到水平滤波处理后的双目图像;对所述水平滤波处理后的双目图像的像素点进行赋值处理, 全部
背景技术:
双目立体视觉(Binocular Stereo Vision)是基于视差原理并利用图像采集设备 从不同的视角获取双目图像,通过计算双目图像对应像素点之间的位置偏差,来获取相应 的三维信息的方法。传统的基于双目立体视觉的三维信息获取方法,是通过基于块匹配的 双目匹配算法来获取三维信息。传统方式中,是通过双目视觉视差的半全局匹配算法来获 取视差图像,由于需要对整个图像进行滤波预处理,导致视差图像的计算时间较长,致使三 维信息的计算效率较低。因此,如何通过减少视差图像的计算时间来提高三维信息的计算 效率成为目前需要解决的一个技术问题。
技术实现要素:
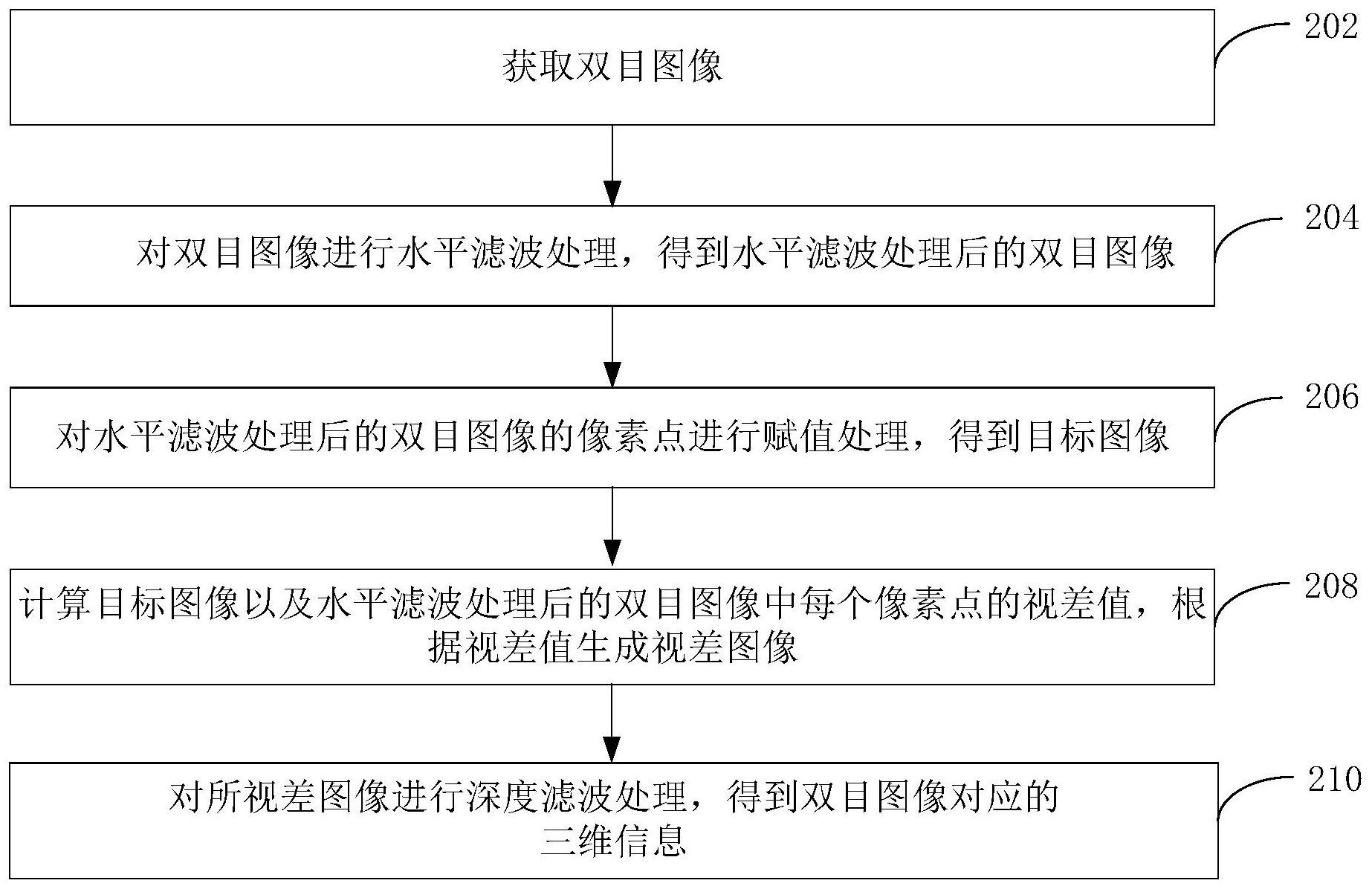
基于此,有必要针对上述技术问题,提供一种能够通过减少视差图像的计算时间 来提高三维信息的计算效率的基于双目立体视觉的三维信息获取方法、装置、计算机设备 和存储介质。 一种基于双目立体视觉的三维信息获取方法,所述方法包括: 获取双目图像; 对所述双目图像进行水平滤波处理,得到水平滤波处理后的双目图像; 对所述水平滤波处理后的双目图像的像素点进行赋值处理,得到目标图像; 计算所述目标图像以及所述水平滤波处理后的双目图像中每个像素点的视差值, 根据所述视差值生成视差图像; 对所述视差图像进行深度滤波处理,得到所述双目图像对应的三维信息。 在其中一个实施例中,所述对所述视差图像进行深度滤波处理,得到双目图像对 应的三维信息包括: 获取预设权重系数矩阵; 根据所述预设权重系数矩阵对所述视差图像进行深度滤波处理,得到深度滤波处 理后的视差图像; 根据所述视差图像得到所述双目图像对应的三维信息。 在其中一个实施例中,所述对所述水平滤波处理后的双目图像的像素点进行赋值 处理,得到目标图像包括: 将所述水平滤波处理后的双目图像中的像素点信息与预设梯度阈值进行比较,得 到比较结果; 根据所述比较结果对相应的水平滤波处理后的双目图像中像素点信息的像素点 进行赋值处理; 4 CN 111553850 A 说 明 书 2/8 页 根据赋值处理后的像素点映射至对应的新图像中,得到目标图像。 在其中一个实施例中,所述双目图像包括第一图像以及第二图像,所述目标图像 包括水平滤波处理后的第一图像对应的目标图像以及水平滤波处理后的第一图像对应的 目标图像,所述计算所述目标图像以及所述水平滤波处理后的双目图像中每个像素点的视 差值包括: 根据所述目标图像计算所述水平滤波处理后的第一图像对应的目标图像中像素 点与所述水平滤波处理后的第二图像对应的目标图像中像素点的像素值之和的差值,作为 第一差值; 根据所述水平滤波处理后的双目图像计算所述水平滤波处理后的第一图像中像 素点与所述水平滤波处理后的第二图像中像素点的像素值之和的差值,作为第二差值; 根据所述第一差值以及第二差值计算所述目标图像以及所述水平滤波处理后的 双目图像中每个像素点的视差值。 在其中一个实施例中,在所述对所述双目图像进行水平滤波处理之前,还包括: 获取标定参数; 根据所述标定参数对所述双目图像进行校正,得到校正后的双目图像。 一种基于双目立体视觉的三维信息获取装置,所述装置包括: 通信模块,用于获取双目图像; 水平滤波模块,用于对所述双目图像进行水平滤波处理,得到水平滤波处理后的 双目图像; 赋值模块,用于对所述水平滤波处理后的双目图像的像素点进行赋值处理,得到 目标图像; 计算模块,用于计算所述目标图像以及所述水平滤波处理后的双目图像中每个像 素点的视差值,根据所述视差值生成视差图像; 深度滤波模块,用于对所述视差图像进行深度滤波处理,得到所述双目图像对应 的三维信息。 在其中一个实施例中,所述深度滤波模块还用于获取预设权重系数矩阵;根据所 述预设权重系数矩阵对所述视差图像进行深度滤波处理,得到深度滤波处理后的视差图 像;根据所述视差图像得到所述双目图像对应的三维信息。 在其中一个实施例中,所述计算模块还用于根据所述目标图像计算所述水平滤波 处理后的第一图像对应的目标图像中像素点与所述水平滤波处理后的第二图像对应的目 标图像中像素点的像素值之和的差值,作为第一差值;根据所述水平滤波处理后的双目图 像计算所述水平滤波处理后的第一图像中像素点与所述水平滤波处理后的第二图像中像 素点的像素值之和的差值,作为第二差值;根据所述第一差值以及第二差值计算所述目标 图像以及所述水平滤波处理后的双目图像中每个像素点的视差值。 一种计算机设备,包括存储器和处理器,所述存储器存储有可在处理器上运行的 计算机程序,所述处理器执行所述计算机程序时实现上述各个方法实施例中的步骤。 一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执 行时实现上述各个方法实施例中的步骤。 上述基于双目立体视觉的三维信息获取方法、装置、计算机设备和存储介质,通过 5 CN 111553850 A 说 明 书 3/8 页 对双目图像进行水平滤波处理,对水平滤波处理后的双目图像的像素点进行赋值处理,得 到目标图像,能够对异常的像素点进行校正,有利于提高后续视差计算的准确性。计算目标 图像以及水平滤波处理后的双目图像中每个像素点的视差值,根据视差值生成视差图像, 对视差图像进行深度滤波处理,得到双目图像对应的三维信息。由于只需要进行水平方向 的滤波,以及后续进行深度滤波处理,滤波处理方式更简快速,能够在保证视差图计算准确 性的基础上,减少计算时间,提高了三维信息的计算效率。同时,对图像进行水平滤波吹处 理提高了水平方向视差信息的准确性。对图像进行深度滤波处理,不仅补充了视差图像中 部分缺失的视差信息,而且加强了视差信息的连续性,能够更准确地表达物体的三维信息。 附图说明 图1为一个实施例中基于双目立体视觉的三维信息获取方法的应用环境图; 图2为一个实施例中基于双目立体视觉的三维信息获取方法的流程示意图; 图3为一个实施例中对视差图像进行深度滤波处理,得到双目图像对应的三维信 息步骤的流程示意图; 图4为一个实施例中基于双目立体视觉的三维信息获取装置的结构框图; 图5为一个实施例中计算机设备的内部结构图。











