
技术摘要:
本申请公开了一种汽车的变道控制方法、装置及存储介质,属于车辆工程技术领域。所述方法包括:通过安装在汽车上的微波雷达及摄像头获取汽车所处环境的环境信息;在检测到变道操作时,根据所述环境信息,确定所述汽车是否满足变道条件;在所述汽车满足变道条件时,控制 全部
背景技术:
随着技术发展,汽车已经成为人们出现的主要代步工具。但是随着汽车数量的增 加,交通事故也越来越频繁。其中,造成交通事故的原因之一是汽车的变道。 目前,汽车在进行变道时,驾驶员需要手动打开转向灯,并观察后方汽车与本车距 离,当后方汽车距离本车较远时,可以进行变道。但是,由于有时候驾驶员可能会忘记观察 后方汽车,此时进行变道将会导致本车与后车相撞,造成交通事故。
技术实现要素:
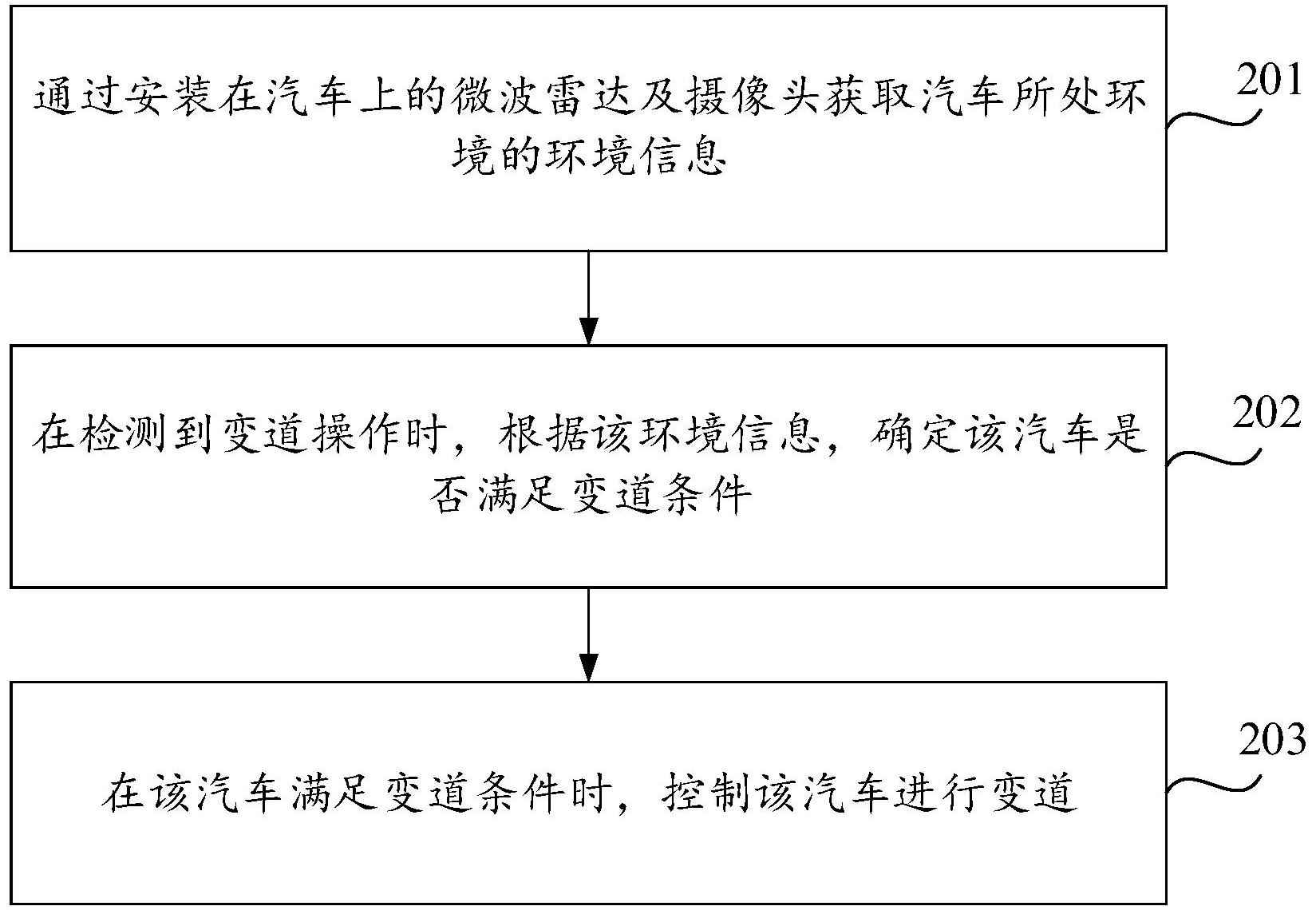
本申请提供了一种汽车的变道控制方法、装置及存储介质,可以解决相关技术中 变道操作繁琐、变道效率低且变道安全性差的问题。所述技术方案如下: 一方面,提供了一种汽车的变道控制方法,所述方法包括: 通过安装在汽车上的微波雷达及摄像头获取汽车所处环境的环境信息; 在检测到变道操作时,根据所述环境信息,确定所述汽车是否满足变道条件; 在所述汽车满足变道条件时,控制所述汽车进行变道。 在一些实施例中,所述根据所述环境信息,确定所述汽车是否满足变道条件,包 括: 对所述环境信息进行图像检测; 当检测到所述变道操作所指示的车道内存在其他汽车,且所述其他汽车与所述汽 车的距离小于或等于安全距离阈值时,确定所述汽车的不满足所述变道条件; 当检测到所述变道操作所指示的车道内不存在其他汽车,或者,存在所述其他汽 车且所述其他汽车与所述汽车的距离大于所述安全距离阈值时,确定所述汽车的满足所述 变道条件。 在一些实施例中,所述确定所述汽车是否满足变道条件之后,还包括: 在所述汽车不满足所述变道条件时,控制所述汽车停止变道,并返回所述获取通 过安装在汽车上的微波雷达及摄像头采集的环境信息的操作,直至所述汽车满足所述变道 条件。 在一些实施例中,所述在所述汽车不满足所述变道条件时,控制所述汽车停止变 道之后,还包括: 通过第一提示信息提示驾驶员在当前所处环境中变道存在安全风险。 在一些实施例中,所述在所述汽车满足变道条件时,控制所述汽车进行变道之后, 还包括: 在变道结束后的预设时长内未检测到所述汽车的驾驶员接管所述汽车时,通过第 4 CN 111572547 A 说 明 书 2/10 页 二提示信息提示所述驾驶员接管所述汽车。 在一些实施例中,所述在所述汽车满足变道条件时,控制所述汽车进行变道之后, 还包括: 在控制所述汽车进行变道过程中,当所述汽车的环境检测区域内驶入其他汽车 时,控制所述汽车终止变道;和/或, 在控制所述汽车进行变道过程中,接收到终止变道指令时,控制所述汽车终止变 道。 另一方面,提供了一种汽车的变道控制装置,所述装置包括: 获取模块,用于通过安装在汽车上的微波雷达及摄像头获取汽车所处环境的环境 信息; 确定模块,用于在检测到变道操作时,根据所述环境信息,确定所述汽车是否满足 变道条件; 第一控制模块,用于在所述汽车满足变道条件时,控制所述汽车进行变道。 在一些实施例中,所述确定模块包括: 检测子模块,用于对所述环境信息进行图像检测; 第一确定子模块,用于当检测到所述变道操作所指示的车道内存在其他汽车,且 所述其他汽车与所述汽车的距离小于或等于安全距离阈值时,确定所述汽车的不满足所述 变道条件; 第二确定子模块,用于当检测到所述变道操作所指示的车道内不存在其他汽车, 或者,存在所述其他汽车且所述其他汽车与所述汽车的距离大于所述安全距离阈值时,确 定所述汽车的满足所述变道条件。 在一些实施例中,所述装置还包括: 触发模块,用于在所述汽车不满足所述变道条件时,控制所述汽车停止变道,并触 发所述获取模块获取通过安装在汽车上的微波雷达及摄像头采集的环境信息,直至所述汽 车满足所述变道条件。 在一些实施例中,所述装置还包括: 第一提示模块,用于通过第一提示信息提示驾驶员在当前所处环境中变道存在安 全风险。 在一些实施例中,所述装置还包括: 第二提示模块,用于在变道结束后的预设时长内未检测到所述汽车的驾驶员接管 所述汽车时,通过第二提示信息提示所述驾驶员接管所述汽车。 在一些实施例中,所述装置还包括: 第二控制模块,用于在控制所述汽车进行变道过程中,当所述汽车的环境检测区 域内驶入其他汽车时,控制所述汽车终止变道;和/或, 第三控制模块,用于在控制所述汽车进行变道过程中,接收到终止变道指令时,控 制所述汽车终止变道。 另一方面,提供了一种汽车,所述汽车包括存储器和处理器,所述存储器用于存放 计算机程序,所述处理器用于执行所述存储器上所存放的计算机程序,以实现上述所述的 汽车的变道控制方法的步骤。 5 CN 111572547 A 说 明 书 3/10 页 另一方面,提供了一种计算机可读存储介质,所述存储介质内存储有计算机程序, 所述计算机程序被处理器执行时实现上述所述汽车的变道控制方法的步骤。 另一方面,提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得 计算机执行上述所述的汽车的变道控制方法的步骤。 本申请提供的技术方案至少可以带来以下有益效果: 本申请中,汽车可以获取汽车所处环境的环境信息,并根据环境信息确定汽车满 足变道条件时,控制汽车自动进行变道,改善了驾驶员变道过程中无法观察到汽车盲区内 危险汽车的情况,且改善了驾驶员人为进行变道的繁琐操作,减轻了驾驶员的工作量,提高 了汽车变道的效率和安全性,降低了交通事故发生的可能性。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1为本申请实施例提供的一种汽车的变道控制系统架构示意图; 图2是本申请实施例提供的一种汽车的变道控制方法的流程图; 图3是本申请实施例提供的另一种汽车的变道控制方法的流程图; 图4是本申请实施例提供的一种汽车的变道控制装置的结构示意图; 图5是本申请实施例提供的一种确定模块的结构示意图; 图6是本申请实施例提供的另一种汽车的变道控制装置的结构示意图; 图7是本申请实施例提供的另一种汽车的变道控制装置的结构示意图; 图8是本申请实施例提供的另一种汽车的变道控制装置的结构示意图; 图9是本申请实施例提供的另一种汽车的变道控制装置的结构示意图; 图10是本申请实施例提供的一种汽车的结构示意图。











