
技术摘要:
一种用于圆形刀具及隔环的拾取装置,包括两端带法兰的机械手连接件、机械手框架、机械手吸盘支架,所述机械手吸盘支架沿周向安装有气动吸盘,所述机械手连接件一端通过与机械手框架螺接,所述机械手框架的四角处通过自润滑轴承安装有机械手导向轴,机械手导向轴另一端 全部
背景技术:
随着智慧制造在制生产造业中的发展趋势,自动化组刀设备在板料的剪切生产 中,欧美国家已经得到广泛的应用,国内也有少数剪切线采用该自动化装置,但仅限于外资 企业的自用设备中。主要是在设备引进过程中,不仅价格昂贵,而且有技术转让限制,因此, 近几年来我国自主研发设计了纵剪线自动化组刀装置,不仅打破了国外的技术壁垒,而且 能提升了设备国产化的能力,大幅降低设备的成本投入,但是经过几年的使用情况跟踪来 看,我国自主研发的自动化组刀装置采用在机器人上安装三爪撑杆为机械手的方式利用气 缸动作原理将刀库里面的圆形刀具及隔环内径撑起取下送往刀轴组装,问题点就在于取 3mm以下的隔环时由于比较薄,在三爪撑杆撑起隔环内径的过程中会发生变形和脱落,这样 就会发生人工干预,从而影响组刀设备的稳定性和效率,所以说刀具及隔环拾取状装置的 机械手还有待改进。
技术实现要素:
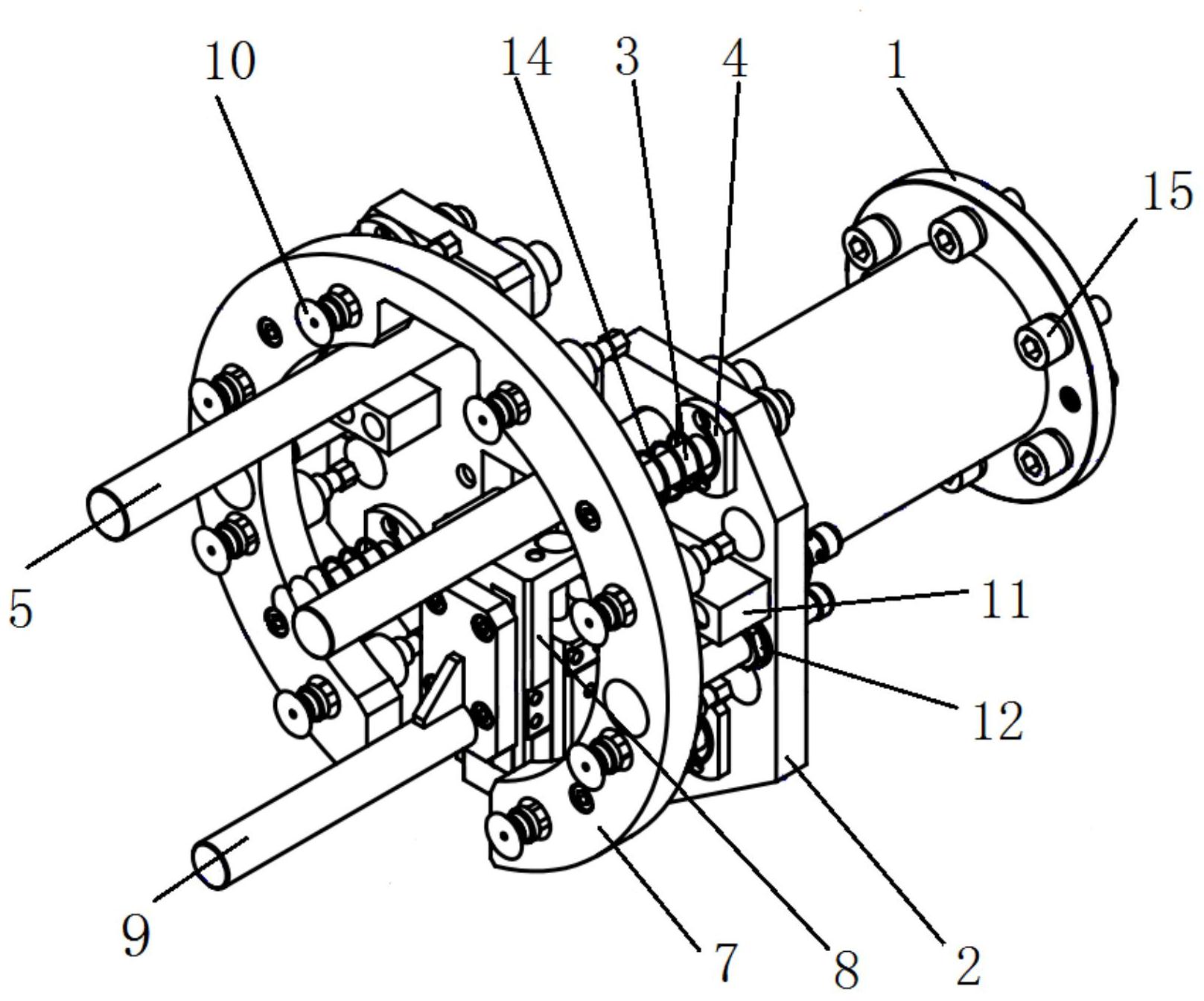
本发明的目的在于提供一种用于圆形刀具和隔环的拾取装置,在拾取过程中快 速、稳定、精准的装置,从而来提高剪切线的自动化程度,提高剪切线刀具的组装效率和精 度。 为了实现上述目的,本发明采用如下技术方案: 一种用于圆形刀具及隔环的拾取装置,包括两端带法兰的机械手连接件、机械手 框架、机械手吸盘支架,所述机械手吸盘支架形状为圆环状,且机械手吸盘支架上开设有豁 口,机械手吸盘支架沿周向安装有气动吸盘,所述机械手连接件一端通过内六角圆柱头螺 钉及弹性垫圈与机械手框架螺接,机械手连接件另一端与取刀机器人的六轴连接,所述机 械手框架的四角处通过自润滑轴承安装有机械手导向轴,机械手导向轴伸出机械手框架一 端通过导向轴挡块固定,机械手导向轴另一端外圆套装有弹簧,且末端通过内六角圆柱头 螺钉固定在机械手吸盘支架上,所述机械手框架上呈三角形布置有夹抓压紧块和机械手抓 取杆,两个机械手抓取杆对称设置,且位于夹抓压紧块的上方,所述夹抓压紧块位于机械手 吸盘支架豁口处,机械手抓取杆一端通铝型材连接件固定在机械手框架上,夹抓压紧块一 端通过滑台气缸固定在机械手框架上,夹抓压紧块和机械手抓取杆另一端均穿过机械手吸 盘支架设置,位于上方的机械手导向轴和位于下方的机械手导向轴之间固装有限位挡块, 限位挡块下方的机械手框架上安装有光电传感器,所述机械手框架上安装有薄隔圈检测传 感器,且薄隔圈检测传感器所在平面与限位挡块所在平面平行设置,且薄隔圈检测传感器 位于限位挡块后端,所述气动吸盘和滑台气缸均通过软管与气源连接。 3 CN 111590614 A 说 明 书 2/3 页 所述机械手连接件、机械手框架、机械手导向轴、自润滑轴承、机械手抓取杆、导向 轴挡块、机械手吸盘支架、滑台气缸、夹抓压紧块、限位挡块、弹簧及内六角圆柱头螺钉均使 用铝材料制成。 所述气动吸盘包括吸盘、双头气缸,所述双头气缸的缸体部分固定安装在机械手 吸盘支架上,双头气缸的其中一个杆体末端与吸盘固定连接,另一个杆体末端通过软管与 气源连接,且双头气缸的两个杆体为中空杆体。 本发明的有益效果为: 用于圆形刀具及隔环的拾取装置在拾取小于5mm的圆形刀具及隔环时采用气动吸 盘拾取,大于5mm的圆形刀具及隔环时采用三爪撑杆拾取方法,是将两种方法组合在一起的 拾取装置,通过采用气动吸盘的拾取方式,避免拾取3mm以下的隔环时由于隔环比较薄,在 三爪撑杆撑起隔环内径的过程中会发生变形和脱落的现象,以及人工干预影响组刀设备的 稳定性和效率的问题,从而达到了设备的稳定性和精准度,同时也提高了组刀效率。 附图说明 图1为本发明用于圆形刀具及隔环的拾取装置的三维示意图; 图2为本发明用于圆形刀具及隔环的拾取装置的主视图; 图3为本发明用于圆形刀具及隔环的拾取装置的侧视图; 图4为本发明用于圆形刀具及隔环的拾取装置的俯视图; 图5为本发明用于圆形刀具及隔环的拾取装置的图3的A-A向剖视图; 1-机械手连接件,2-机械手框架,3-机械手导向轴,4-自润滑轴承,5-机械手抓取 杆,6-导向轴挡块,7-机械手吸盘支架,8-滑台气缸,9-夹抓压紧块,10-气动吸盘,11-限位 挡块,12-光电传感器,13-薄隔圈检测传感器,14-弹簧,15-内六角圆柱头螺钉。











