
技术摘要:
本发明提供了一种紫外光协助无人机编队最优刚性拓扑生成方法,包括以下步骤:S1:无人机编队中的每个节点到达提前规定好的集结点;S2:每个无人机节点利用搭载的无线紫外光MIMO装置寻找自身的邻居节点,并建立各自的邻居信息列表;S3:根据邻居信息列表中的内容计算每 全部
背景技术:
由于单个无人机计算、探测和作业能力有限,使用多无人机协作的形式能充分发 挥集群无人机的优势,提高无人机执行任务的能力。无人机编队协同的基础是各机之间保 持可靠通信,实时信息共享,但在特殊情况下,特别是电子对抗过程中无人机编队需要保持 无线电静默状态以降低暴露风险,若无人机只使用无线电通信方式,此时很难维持编队通 信网络的完整性。无线紫外光具有背景噪声小、抗干扰能力强、低功耗、易于机载等优点,能 满足这种通信方式下的需求。 拓扑控制的任务就是依据给定的规则为各节点从物理邻居节点中选取合理的逻 辑邻居节点进行通信,从而保证在全局网络连通的条件下降低节点的传输功率,有效地延 长网络生命周期,分为集中式拓扑控制和分布式拓扑控制。集中式拓扑控制的实现依赖于 全局信息的获得,因此网络可部署规模有限。在分布式拓扑控制中,各节点只需依据从其物 理邻居节点获知的信息自主选择其逻辑邻居节点,典型的方法有LMST、CBTC、RNG等。基于刚 性图构建的拓扑任何一个顶点的运动都不会破坏整个图的形状,适用于无人机编队保持时 的应用,最优刚性图是一种拥有最少的通信边数且各边边长加权和最小的刚性图。 稳定的无人机编队通信网络能保障整个编队集群高效地执行任务,因此,需要为 编队设计一个信息交互拓扑,使所有无人机使用此信息交互拓扑生成并保持给定的编队队 形且通信代价最小。对于大规模的无人机网络,每个无人机的通信距离有限,只能与它的邻 居节点进行通信,提出一种基于最优刚性图的分布式拓扑控制方法,不需要知道所有无人 机节点的信息,每个无人机节点只需要知道相邻无人机的信息。 需要注意的是,本部分旨在为权利要求书中陈述的本发明的实施方式提供背景或 上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
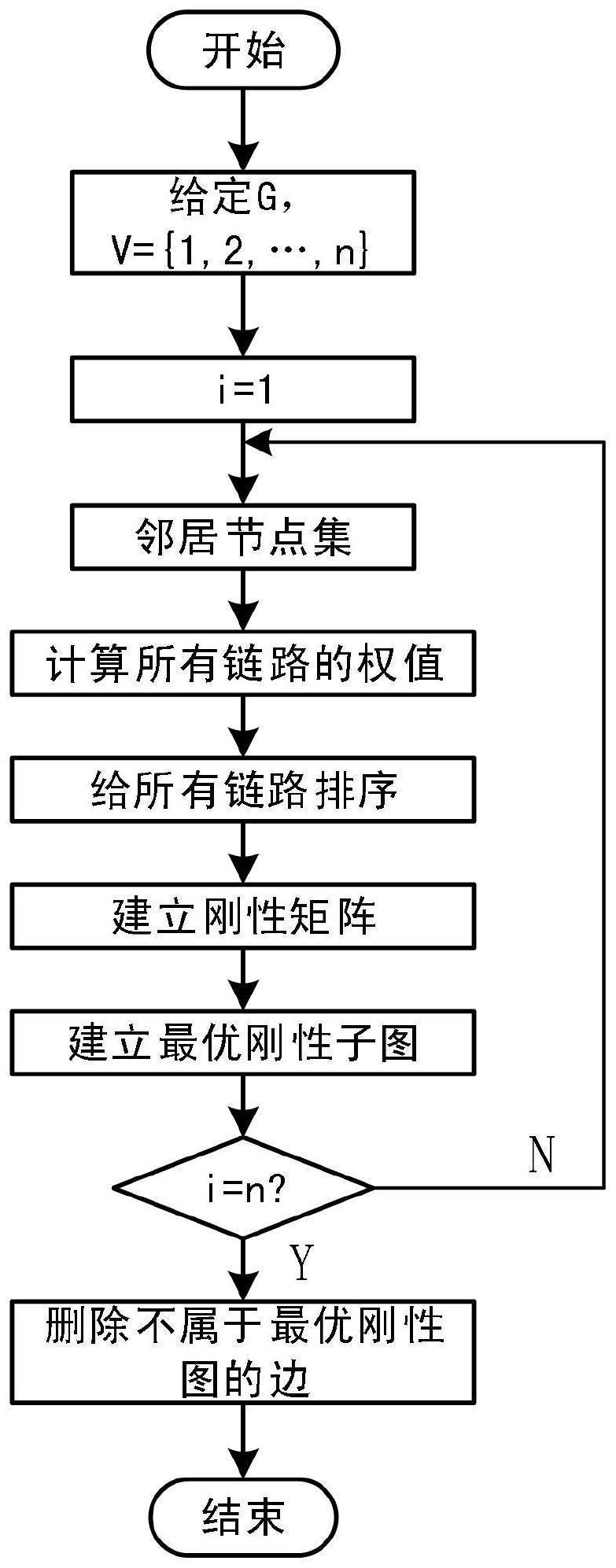
本发明目的在于提供了一种紫外光协助无人机编队最优刚性拓扑生成方法,使无 人机编队在保持队形的同时减少拓扑的复杂性,构建的网络是链路权值最小的拓扑图,减 少了网络的能量消耗,实现了节能的目的。 为实现上述目的本发明采用如下技术方案: 该一种紫外光协助无人机编队最优刚性拓扑生成方法,其特征在于,包括以下步 骤: S1:无人机编队中的每个节点到达提前规定好的集结点; S2:每个无人机节点利用搭载的无线紫外光MIMO装置寻找自身的邻居节点,并建 立各自的邻居信息列表; 3 CN 111600644 A 说 明 书 2/5 页 S3:根据邻居信息列表中的内容计算每个无人机节点和其邻居节点的链路权值; S4:每个无人机节点和邻居节点依据步骤S3中的链路权值构成局部最优刚性拓 扑,生成最优刚性子图,删除不属于最优刚性图的边,得到全局最优刚性编队图,基于全局 最优刚性编队图的分布式编队拓扑生成。 进一步地,上述步骤S1无人机编队中每架无人机的顶部和底部都装载一个半球形 的LED阵列。 进一步地,上述步骤S2具体如下: S201:每个无人机节点利用搭载的无线紫外光MIMO装置,采用纬向扫描和经向扫 描交替的方式寻找自身的邻居节点,然后给邻居节点发送信息帧; S202:邻居节点接收到发送信息帧后,通过同样的纬向扫描和经向扫描的方式给 发送信息帧的节点发送应答信息帧; S203:当发送信息帧的节点接收到应答信息帧后,会根据应答信息帧中的内容建 立一个自身的邻居信息列表; 进一步地,上述发送信息帧包括节点自身的ID号、信息类型识别码和LED经纬编 码。 进一步地,上述应答信息帧包括发送信息帧节点的ID号、信息类型识别码、方向编 码,与发送应答信息帧节点的ID号、方向编码、剩余能量和位置坐标。 进一步地,上述邻居信息列表包括邻居节点的ID号、邻居节点的剩余能量、邻居节 点相对于自身的方向坐标、邻居节点的位置和各链路的权值。 进一步地,上述步骤S3具体如下: 在无人机编队中,两个具有邻居关系的节点i、j的链路权值函数为: 其中,L为两节点进行通信的路径损耗;Eti和Erj和表示两节点之间通过紫外光收 发数据的能量消耗;ei、ej为节点在集结完成后的剩余能量。 本发明的有益效果: (1)本发明通信代价最小,使得网络的链路更加可靠,同时减少了网络的能量消 耗,实现了节能的目的,提高了无人机集群编队时的作业能力。 (2)本发明不需要知道所有无人机节点的信息,编队中的每个无人机仅仅需要知 道相邻无人机的信息,适合大规模无人机网络。 附图说明 图1为本发明中基于最优刚性图的分布式流程图; 图2是本发明中无人机的基本结构示意图; 图3是本发明中无人机搭载的半球形紫外LED通信节点结构图; 图4是本发明中无人机寻找邻居阶段的发送、应答信息帧图; 图5为本发明中每个无人机节点的邻居信息列表图; 图6为本发明中涉及的可变性图; 图7为本发明中涉及的刚性图; 4 CN 111600644 A 说 明 书 3/5 页 图8为本发明中涉及的最小刚性图。 附图标记如下: 1-半球体,2-紫外LED,3-全向接收器。











