
技术摘要:
本发明公开了一种用于对电力设施仪表进行自动定位的方法及系统,包括:获取多组处于不同的采集环境条件且包含电力设施仪表的原始图像数据,并进行数据增广处理,以获取样本图像数据集;对样本图像数据集中的图像进行内容标注;构建卷积神经网络模型,利用经过内容标注 全部
背景技术:
随着泛在电力物联网的深入建设,电力巡检机器人作为感知层的重要节点得到了 全面使用,目前我国变电站巡检机器人保有量超过1000台,已经成为我国变电站巡检工作 中不可替代的技术手段,有助于释放人工巡视压力,降低检修劳动强度。 采集变电站中大量运行设备的仪表信息是电力巡检机器人最主要的工作,也是巡 检机器人之所以能够替代人工巡检最核心的价值所在。仪表包括指针式仪表、数字式仪表、 液位仪表和料位仪表和户外式隔离开关等工业自动化仪表和高压设备。针对于巡检区域内 电力设施仪表的定位问题,现阶段一般采用预埋磁导轨配合电子标签,GPS定位技术配合站 内地理数据,或者基于机器视觉的特征模版匹配等方法来实现工程化应用,但各自还存在 一些缺点。例如,机器人自身和云台定位的重复性精度有限,从而影响到巡检目标的成功采 集;当光照,天气等外界因素变化时,目标仪表的成像质量得不到保障,同时随着时间的推 移,目标仪表的表面纹理也会有所改变,这对现有的特征匹配方案的鲁棒性就提出了较大 的挑战。 经过梳理,现有技术尚且存在以下缺点或不足: 1.磁导轨配合电子标签类解决方案,因为采用了预埋磁性轨道来为巡检机器人提 供导航信息,前期预铺设工程量大,后期系统维护和更换路径规划不易,缺乏面对需求迭代 时的灵活性。 2.GPS定位技术配合站内地理数据类解决方案,实际效果依赖于卫星定位精度,而 定位精度受到大气层延迟、当前可见卫星分布、卫星钟差等多个客观存在不可剔除的系统 因素共同影响,方案的可靠性还有待研究。 3.基于机器视觉的特征模版匹配类解决方案,通常是基于提取图像特征,通过滑 动窗口来穷举检测目标,具有较高的时间复杂性,同时在受到光照,天气等外界因素变化介 入时,识别精度并不能得到较好的保障。 因此,需要研究一种新的定位方法,以使得电力巡检机器人能够根据采集的仪表 信息确准确地对巡检区域内电力设施仪表进行定位。
技术实现要素:
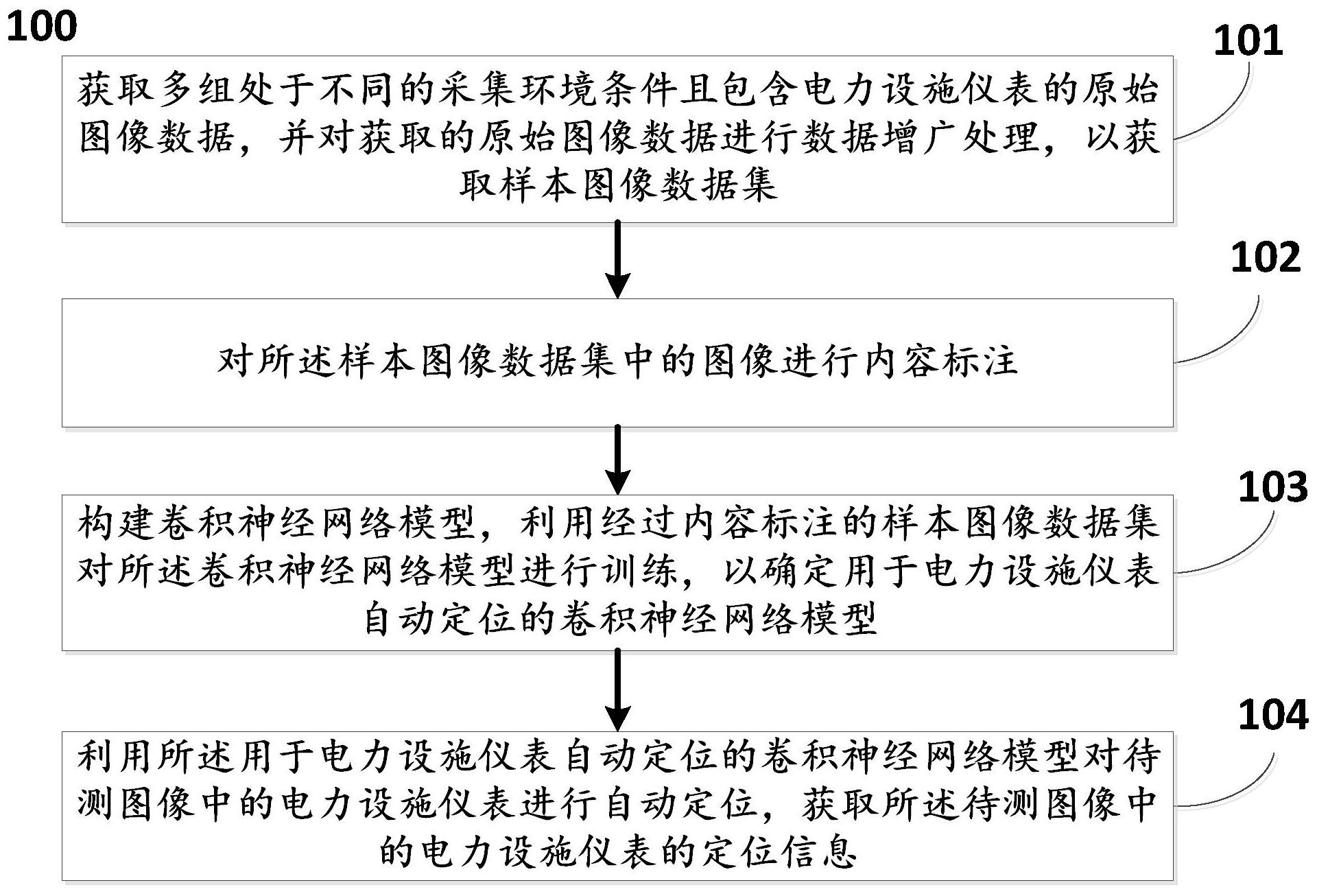
本发明提出一种用于对电力设施仪表进行自动定位的方法及系统,以解决如何自 动识别电力设施仪表的位置的问题。 为了解决上述问题,根据本发明的一个方面,提供了一种用于对电力设施仪表进 行自动定位的方法,所述方法包括: 获取多组处于不同的采集环境条件且包含电力设施仪表的原始图像数据,并对获 6 CN 111598942 A 说 明 书 2/13 页 取的原始图像数据进行数据增广处理,以获取样本图像数据集; 对所述样本图像数据集中的图像进行内容标注; 构建卷积神经网络模型,利用经过内容标注的样本图像数据集对所述卷积神经网 络模型进行训练,以确定用于电力设施仪表自动定位的卷积神经网络模型; 利用所述用于电力设施仪表自动定位的卷积神经网络模型对待测图像中的电力 设施仪表进行自动定位,获取所述待测图像中的电力设施仪表的定位信息。 优选地,其中所述不同的采集环境条件包括:图像中电力设施仪表的数量不同、采 集的角度不同、电力设施仪表在图像中的占比不同、电力设施仪表发生形状变化的位置不 同、图像中电力设施仪表的可见比例不同、采集的光照不同、采集的背景不同和电力设施仪 表的型号不同中的至少一个。 优选地,其中所述对获取的原始图像进行数据增广处理包括: 通过几何变换和像素变换的方式对获取的原始图像数据进行数据增广处理。 优选地,其中所述对所述样本图像数据集中的图像进行内容标注,包括: 确定所述样本图像数据集中每个图像的图像信息和图像中电力设施仪表的位置 信息;其中,所述图像信息包括:图像的名称、图像的路径、图像的尺寸和图像中的检测目标 的名称;所述图像中电力设施仪表的位置信息,包括:电力设施仪表的中心坐标和所述电力 设施仪表所在边界框的宽度和高度。 优选地,其中所述构建卷积神经网络模型,利用经过内容标注的样本图像数据集 对所述卷积神经网络模型进行训练,以确定用于电力设施仪表自动定位的卷积神经网络模 型,包括: 步骤1,构建YOLO V3卷积神经网络模型,设置模型参数,并初始化所述卷积神经网 络模型各层节点的权值和偏值; 步骤2,利用经过内容标注的样本图像数据集中的训练数据对当前的卷积神经网 络模型进行训练,并计算当前的卷积神经网络的确定损失函数值; 步骤3,判断是否满足当前的损失函数值小于预设的损失函数值阈值,或相邻两个 迭代过程中对应的损失函数值间的差值小于预设的差值阈值,或迭代次数已达到预设次 数;若满足,则确定当前的卷积神经网络模型为用于电力设施仪表自动定位的卷积神经网 络模型;反之,则进入步骤4; 步骤4,利用梯度下降算法对所述卷积神经网络模型各层节点的权值和偏值进行 修正,并返回步骤2重新训练。 6、根据权利要求5所述的方法,其特征在于,所述方法还包括: 利用经过内容标注的样本图像数据集中的测试数据对当前的卷积神经网络模型 进行测试。 优选地,其中利用如下方式确定损失函数值,包括: L(O,o,C,c,l,g)=λ1Lcoordinate(l,g)=λ2Lconfidence(o,c) λ3Lclass(O,C), 7 CN 111598942 A 说 明 书 3/13 页 其中,Lcoordinate(l,g)为目标边界框位移损失,Lconfidence(o,c)为目标置信度损失, Lclass(O,C)为目标分类损失,λ1、λ2和λ3为权重系数,目标边界框位移损失由中心坐标损失和 边界框宽与高的损失构成,通过预测与实际边界框坐标偏移量的平方和来计算,其中,此处 的坐标均为映射在特征层上的坐标,而非真实坐标;为预测边界框坐标与网格单元边框的 偏移量, 为实际边界框坐标与网格单元边框的偏移量,(bx,by,bw,bh)为预测边界框的坐 标参数,(cx,cy,cw,ch)为网格单元边框的坐标参数,(gx,gy,gw,gh)为实际边界框的坐标参 数;目标置信度损失函数用来表征当前网格存在目标的概率,以及存在目标情况下真实目 标所在边界框与预测目标所在边界框的交并比IoU,通过二分类交叉熵进行表达,oi∈{0, 1},1表示预测目标边界框中存在真实目标,0表示不存在; 为存在真实目标的概率,由置 信度的预测值ci通过Sigmoid函数概率得到;目标分类损失函数是当预测边界框中存在真 实目标时,需要检测的所有类别存在的概率,通过二分类交叉熵进行表达,oij∈{0,1},1表 示预测目标边界框中存在真实目标,0表示不存在; 为存在真实目标的概率,由置信度的 预测值cij通过Sigmoid函数概率得到。 优选地,其中所述定位信息包括:目标的中心坐标、目标所在边界框的宽度和高度 和目标识别结果的置信度。 根据本发明的另一个方面,提供了一种用于对电力设施仪表进行自动定位的系 统,所述系统包括: 样本图像数据集获取单元,用于获取多组处于不同的采集环境条件且包含电力设 施仪表的原始图像数据,并对获取的原始图像数据进行数据增广处理,以获取样本图像数 据集; 内容标注单元,用于对所述样本图像数据集中的图像进行内容标注; 卷积神经网络模型训练单元,用于构建卷积神经网络模型,利用经过内容标注的 样本图像数据集对所述卷积神经网络模型进行训练,以确定用于电力设施仪表自动定位的 卷积神经网络模型; 定位信息获取单元,用于利用所述用于电力设施仪表自动定位的卷积神经网络模 型对待测图像中的电力设施仪表进行自动定位,获取所述待测图像中的电力设施仪表的定 位信息。 优选地,其中所述不同的采集环境条件包括:图像中电力设施仪表的数量不同、采 集的角度不同、电力设施仪表在图像中的占比不同、电力设施仪表发生形状变化的位置不 同、图像中电力设施仪表的可见比例不同、采集的光照不同、采集的背景不同和电力设施仪 8 CN 111598942 A 说 明 书 4/13 页 表的型号不同中的至少一个。 优选地,其中所述样本图像数据集获取单元,对获取的原始图像进行数据增广处 理包括: 通过几何变换和像素变换的方式对获取的原始图像数据进行数据增广处理。 优选地,其中所述内容标注单元,对所述样本图像数据集中的图像进行内容标注, 包括: 确定所述样本图像数据集中每个图像的图像信息和图像中电力设施仪表的位置 信息;其中,所述图像信息包括:图像的名称、图像的路径、图像的尺寸和图像中的检测目标 的名称;所述图像中电力设施仪表的位置信息,包括:电力设施仪表的中心坐标和所述电力 设施仪表所在边界框的宽度和高度。 优选地,其中所述卷积神经网络模型训练单元,构建卷积神经网络模型,利用经过 内容标注的样本图像数据集对所述卷积神经网络模型进行训练,以确定用于电力设施仪表 自动定位的卷积神经网络模型,包括: 模型构建模块,用于构建YOLO V3卷积神经网络模型,设置模型参数,并初始化所 述卷积神经网络模型各层节点的权值和偏值; 模型训练模块,用于利用经过内容标注的样本图像数据集中的训练数据对当前的 卷积神经网络模型进行训练,并计算当前的卷积神经网络的确定损失函数值; 判断模块,用于判断是否满足当前的损失函数值小于预设的损失函数值阈值,或 相邻两个迭代过程中对应的损失函数值间的差值小于预设的差值阈值,或迭代次数已达到 预设次数;若满足,则确定当前的卷积神经网络模型为用于电力设施仪表自动定位的卷积 神经网络模型;反之,则进入参数修正模块; 参数修正模块,用于利用梯度下降算法对所述卷积神经网络模型各层节点的权值 和偏值进行修正,并返回模型训练模块重新训练。 优选地,其中所述系统还包括: 测试模块,用于利用经过内容标注的样本图像数据集中的测试数据对当前的卷积 神经网络模型进行测试。 优选地,其中所述模型训练模块,利用如下方式确定损失函数值,包括: L(O,o,C,c,l,g)=λ1Lcoordinate(l,g) λ2Lconfidence(o,c) λ3Lclass(O,C), 9 CN 111598942 A 说 明 书 5/13 页 其中,Lcoordinate(l,g)为目标边界框位移损失,Lconfidence(o,c)为目标置信度损失, Lclass(O,C)为目标分类损失,λ1、λ2和λ3为权重系数,目标边界框位移损失由中心坐标损失和 边界框宽与高的损失构成,通过预测与实际边界框坐标偏移量的平方和来计算,其中,此处 的坐标均为映射在特征层上的坐标,而非真实坐标;为预测边界框坐标与网格单元边框的 偏移量, 为实际边界框坐标与网格单元边框的偏移量,(bx,by,bw,bh)为预测边界框的坐标 参数,(cx,cy,cw,ch)为网格单元边框的坐标参数,(gx,gy,gw,gh)为实际边界框的坐标参数; 目标置信度损失函数用来表征当前网格存在目标的概率,以及存在目标情况下真实目标所 在边界框与预测目标所在边界框的交并比IoU,通过二分类交叉熵进行表达,oi∈{0,1},1 表示预测目标边界框中存在真实目标,0表示不存在; 为存在真实目标的概率,由置信度 的预测值ci通过Sigmoid函数概率得到;目标分类损失函数是当预测边界框中存在真实目 标时,需要检测的所有类别存在的概率,通过二分类交叉熵进行表达,oij∈{0,1},1表示预 测目标边界框中存在真实目标,0表示不存在; 为存在真实目标的概率,由置信度的预测 值cij通过Sigmoid函数概率得到。 优选地,其中所述定位信息包括:目标的中心坐标、目标所在边界框的宽度和高度 和目标识别结果的置信度。 本发明提供了一种用于对电力设施仪表进行自动定位的方法及系统,基于 DackNet53深度学习框架,运用YOLO V3算法实现利用可见光呈像相机采集的图像信息,对 电力设施中使用的仪表进行具有泛化普适特性的自主定位,利用预处理的标签数据训练生 成卷积神经网络模型,并通过对实际运用场景的验证,证实了该方法可以在复杂环境中高 效、可靠、可持续性的对电力设施中常用的仪器仪表进行自主判断;本发明从提高输变电工 程领域的运维检修效率出发,根据复杂环境下的可见光呈像相机采集的图像信息进行识别 反馈,具有更高的检测精度和检测时效,满足了电力系统中传统仪表接入泛在电力物联网 的实际工程需求。 附图说明 通过参考下面的附图,可以更为完整地理解本发明的示例性实施方式: 图1为根据本发明实施方式的用于对电力设施仪表进行自动定位的方法100的流 程图; 图2为根据本发明实施方式的获取的包含电力实施仪表的原始图像; 图3为根据本发明实施方式的对原始图像进行增广处理后得到的图像; 图4为根据本发明实施方式的经过内容标注后的图像; 图5为根据本发明实施方式的YOLO V3卷积神经网络层结构的示意图; 图6为根据本发明实施方式的在卷积神经网络模型的训练过程中训练集损失迭代 的示意图; 图7为根据本发明实施方式的在卷积神经网络模型的训练过程中测试集损失迭代 10 CN 111598942 A 说 明 书 6/13 页 的示意图; 图8为根据本发明实施方式的在卷积神经网络模型的训练过程中学习速率迭代的 示意图; 图9为根据本发明实施方式的对待测图像中的电力设施仪表进行自动定位的结果 示意图;以及 图10为根据本发明实施方式的用于对电力设施仪表进行自动定位的系统1000的 结构示意图。











