
技术摘要:
本发明公开了一种高速高海况可下潜的多体无人航行器及其控制方法,该多体无人航行器包括:主船体、多个推进子船体、多个侧翼、多个水平舵、尾鳍和通信子船体;侧翼设置在主船体两侧,侧翼一端与主船体连接,侧翼另一端与推进子船体一侧连接,推进子船体另一侧与水平舵 全部
背景技术:
随着海洋研究、开发及各种活动的不断频繁,无人船的地位日趋重要。无人船作为 一种自主航行的水上航行器,可替代常规船舶进行各种恶劣环境下的探测、巡查、搜救、运 输等作业。目前的无人船大多数采用常规船型设计,常规船型在高速高海况航行时,容易产 生甲板上浪现象,海浪冲上甲板造成抨击的同时产生巨大的航行阻力,还容易造成船舶舱 室进水,其航速、多自由度可控性、回转灵活性、稳定性、耐波性等都难以满足各种恶劣环境 的使用需求,在高海况下往往无法正常作业,甚至无法保证自身安全。另一方面,目前水下 无人航行器多采用类似于潜艇的单体设计,由于其体积往往较潜艇小得多,故单体设计不 仅受潮流的影响较大,其多自由度控制和稳定性等都难以满足工程需要,目前的技术水平 更缺乏能同时满足水上和水下高速航行和作业的有效方案。
技术实现要素:
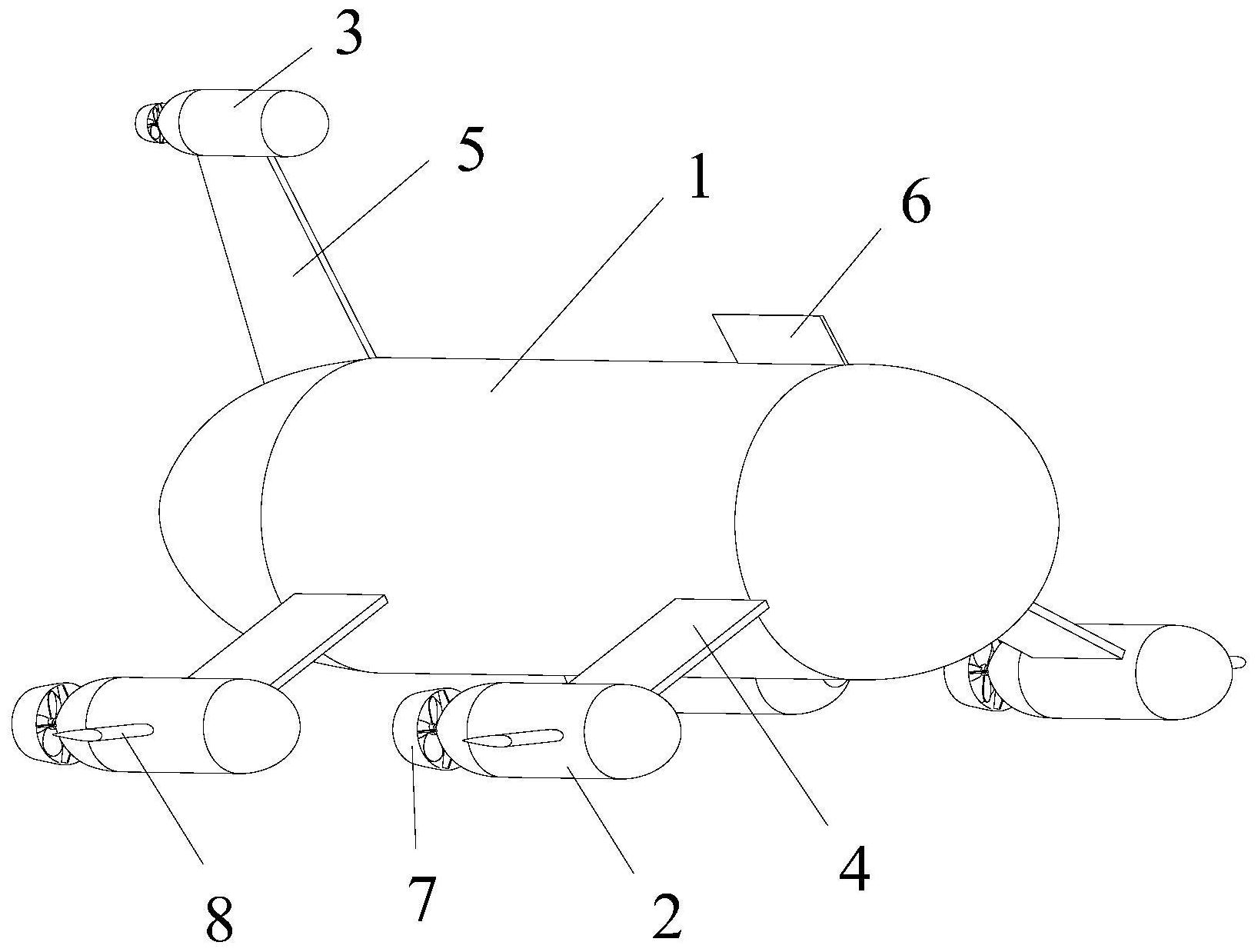
为了克服现有技术存在的缺陷与不足,本发明提出一种高速高海况可下潜的多体 无人航行器及其控制方法,能实现多自由度控制,具有良好的回转性,能够实现水上航行、 半潜航行和全潜航行等多种功能,适应高海况下的水上和水下作业需求;水上航行时,利用 多个水平舵的减摇作用,大大降低波浪对船体的影响,使其能适应高速高海况的航行状态, 并最大限度保持平稳;当遇到巨浪,超出其自身耐波能力时,其可及时下潜航行,避开海面 巨浪的威胁,确保船舶自身的安全;水下航行时,通过多船体与多推进器,利用空间上的多 个推进力相互协调实现多自由度控制,在灵活性、稳定性、快速性方面都是单体无法比拟 的。 为了达到上述目的,本发明采用以下技术方案: 本实施例提供一种高速高海况可下潜的多体无人航行器,包括:主船体、多个推进 子船体、多个侧翼、多个水平舵、尾鳍和通信子船体; 侧翼设置在主船体两侧,侧翼一端与主船体连接,侧翼另一端与推进子船体一侧 连接,推进子船体另一侧与水平舵连接,尾鳍一端与主船体连接,通信子船体与主船体通信 连接; 推进子船体与通信子船体均连接有推进器; 所述主船体内部还设有多个压载水舱,压载水舱用于调整船体内的进排水。 作为优选的技术方案,还设有背鳍,所述背鳍设于主船体上。 作为优选的技术方案,所述尾鳍设有锁紧装置,用于锁紧通信子船体,所述通信子 船体设有拖勾,所述尾鳍内部还设置有拖缆,所述拖缆与所述通信子船体的拖勾相连。 作为优选的技术方案,所述主船体采用轴对称水滴形结构的主船体。 4 CN 111572720 A 说 明 书 2/5 页 作为优选的技术方案,所述推进子船体与通信子船体均采用水滴形结构。 作为优选的技术方案,所述推进子船体的数量设置为四个,设于所述主船体下方 四周,与主船体、通信子船体构成六体无人航行器。 作为优选的技术方案,所述压载水舱数量设置为三个,分别设置在主船体前、中和 后部。 作为优选的技术方案,所述推进器设置有转动导流管螺旋桨,用于改变推进器推 力的方向。 作为优选的技术方案,所述主船体还设置有惯性传感器,所述惯性传感器用于检 测主船体的运动姿态。 本发明还提供一种高速高海况可下潜的多体无人航行器的控制方法,包括下述步 骤: 水上航行时,多体无人航行器控制压载水舱进排水,调整航行器的水上、水下和半 潜航行状态,通过动态调整多个水平舵产生向上或向下的作用力,控制航行时的姿态; 改变推进子船体与通信子船体的各推进器的推力大小或者推力方向,控制航行的 方向; 当检测到航行器的横摇角、纵摇角和垂荡运动中的任一个超过预设值时,判定为 超出多体无人航行器自身耐波能力,多体无人航行器下潜,从水上航行状态调整为水下航 行状态; 主船体下潜时,根据通信需求选择不释放通信子船体模式、有线释放通信子船体 模式或无线释放通信子船体模式; 当选择不释放通信子船体模式时,多体无人航行器自主航行; 当选择有线释放通信子船体模式时,通信子船体漂浮于水面,由主船体通过有线 方式拖带航行,通信子船体和主船体进行有线通信; 当选择无线释放通信子船体模式时,通信子船体脱离主船体,通信子船体单独上 浮,通过自身动力航行,并通过声呐和主船体进行通信。 本发明与现有技术相比,具有如下优点和有益效果: (1)本发明具备同时适应水上航行、半潜航行和水下航行的功能,能同时满足水上 作业和水下作业等多种需求。 (2)本发明当遇到大浪,超出航行器自身耐波能力时,能及时下潜,从水上航行状 态调整为水下航行状态,从而避开海面大浪的威胁,确保船体自身的安全。 (3)本发明采用多体多推进的技术方案,利用空间上的多个推进力相互协调实现 更多自由度的控制,在灵活性、稳定性、快速性方面都是单体无法比拟的,更容易满足高速 高海况水上水下的使用需求。 (4)本发明每个推进子船体都安装有水平舵,通过控制各水平舵的舵角,利用机翼 的升力原理,航行时能在主船体四周产生垂直方向的向上或向下作用力,有利于增加航行 器垂直方向上的可控性,特别是高速航行时其作用力更大;通过各自控制水平舵的舵角,可 使航行器水上航行时更加平稳,水下航行时除了保持平稳,不同的舵角还可以实现航行器 朝上浮或下潜方向改变航向。 (5)本发明主船体采用水滴形设计,有异于常规的水面无人船,通过圆弧形设计, 5 CN 111572720 A 说 明 书 3/5 页 一方面可减少水上高速高海况航行时的上浪阻力,另一方面还可有利于迅速排水和去浪, 在四个水平舵的控制作用下,航行器的水滴形外形更有利于其穿越大浪,实现平稳的航行, 本发明较常规船舶更能适应高速高海况的运行状态。 (6)本发明设置了通信子船体作为远程通信的中继,其可视需要和主船体分离并 漂浮于水面,一方面有利于水上水下的数据传送,另一方面也有利于随时监测水面情况。 (7)本发明主船体安装有侧翼、背鳍和尾鳍,是一种仿生鱼设计,使其更能适应水 中航行状态,提高其航行稳定性。 附图说明 图1为本实施例高速高海况可下潜的多体无人航行器的整体结构示意图; 图2为本实施例高速高海况可下潜的多体无人航行器的主视示意图; 图3为本实施例高速高海况可下潜的多体无人航行器的俯视示意图; 图4为本实施例高速高海况可下潜的多体无人航行器的左视示意图; 图5为本实施例高速高海况可下潜的多体无人航行器的的水上、水下和半潜三种 航行状态的示意图。 其中,1-主船体,2-推进子船体,3-通信子船体,4-侧翼,5-尾鳍,6-背鳍,7-推进 器,8-水平舵。











