
技术摘要:
本申请涉及一种SLAM质量的量化方法、系统、计算机设备和存储介质,其中,该量化方法包括:通过跟踪设备获取预设时刻的AR物体的第一实际位姿;并获取以该预设时刻为起点的,间隔预设间隔时间的第二实际位姿;通过SLAM算法获取该预设时刻的所述AR物体的第一估计位姿;并 全部
背景技术:
增强现实(Augmented Reality,简称为AR)技术是通过带有视觉传感器的设备实 现在物理真实场景中添加并显示虚拟信息,实现现实和虚拟场景的交互。AR技术中通常使 用同时定位与建图(Simultaneous localization and mapping,简称为SLAM)算法,在真实 场景中构建三维地图,并对传感设备进行即时定位;因此,对SLAM质量的量化评估影响到了 AR定位。在相关技术中,通常通过里程计轨迹评估(odometry metric)的绝对平移误差和相 对平移误差实现对SLAM质量的量化。然而,相关技术中的绝对平移误差只能评估整个AR过 程结束后,SLAM算法整体的误差,而相对平移误差只能描述所有相邻两帧之间的误差平均 值,并且,相关技术中的相对平移误差没有量化的“抖动”“跳变”等AR领域关心的用户体验, 从而导致SLAM质量的量化精度较低。 针对相关技术中,SLAM质量的量化精度较低的问题,目前尚未提出有效的解决方 案。
技术实现要素:
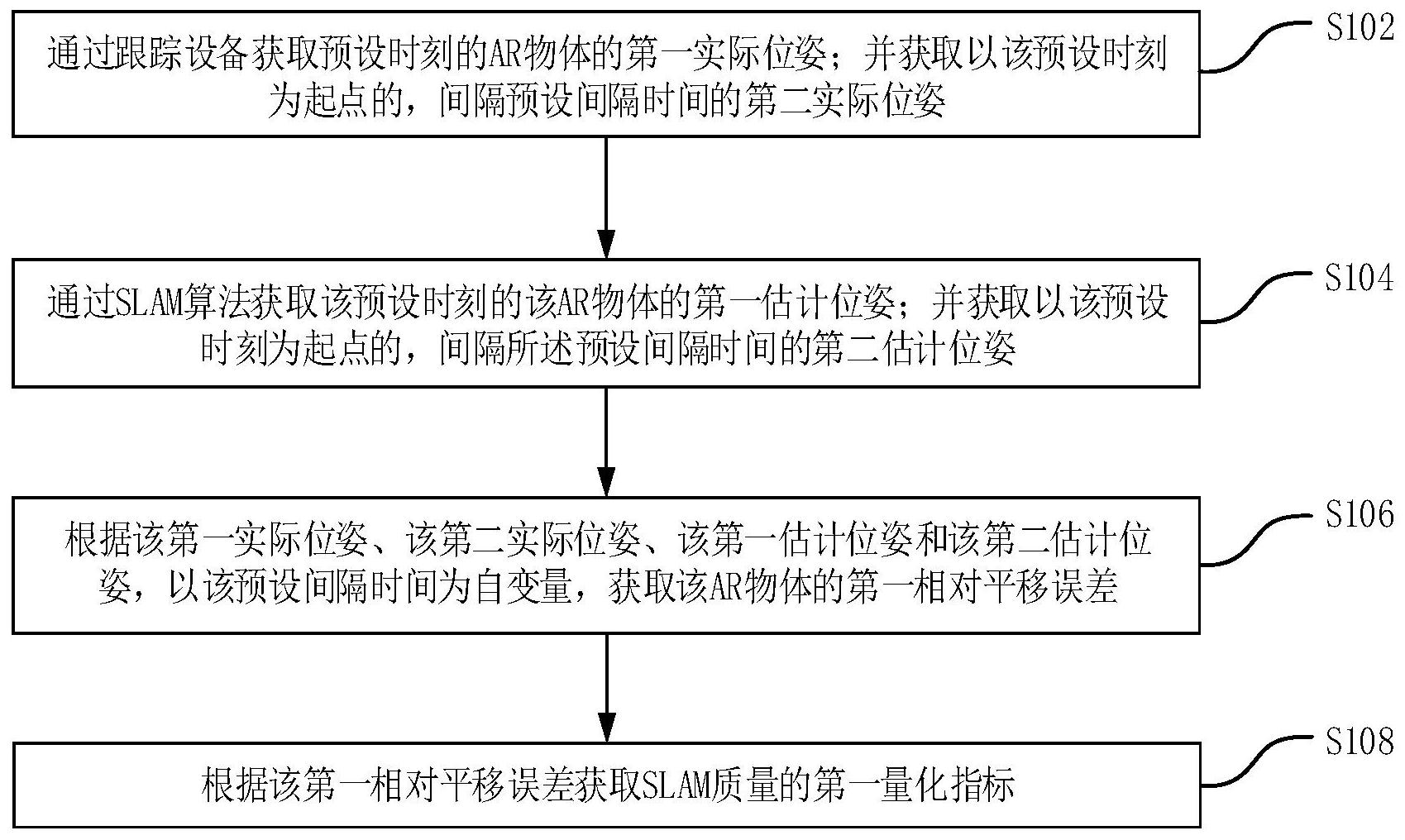
本申请实施例提供了一种SLAM质量的量化方法、系统、计算机设备和存储介质,以 至少解决相关技术中SLAM质量的量化精度较低的的问题。 第一方面,本申请实施例提供了一种SLAM质量的量化方法,所述方法包括: 通过跟踪设备获取预设时刻的增强现实AR物体的第一实际位姿;并通过所述跟踪 设备获取以所述预设时刻为起点,间隔预设间隔时间的第二实际位姿; 通过SLAM算法获取所述预设时刻的所述AR物体的第一估计位姿;并通过所述SLAM 算法获取以所述预设时刻为起点的,间隔所述预设间隔时间的第二估计位姿; 根据所述第一实际位姿、所述第二实际位姿、所述第一估计位姿和所述第二估计 位姿,以所述预设间隔时间为自变量,获取所述AR物体的第一相对平移误差; 根据所述第一相对平移误差获取SLAM质量的第一量化指标。 在其中一些实施例中,所述方法还包括: 获取终端设备的第二相对平移误差在预设阈值范围内的第一均方根误差,根据所 述第一均方根误差确定所述终端设备的抖动值; 获取所述第二相对平移误差大于或者等于预设阈值的累计值,并根据所述累计值 和总帧数获取跳变率; 根据所述抖动值和所述跳变率获取所述SLAM质量的第二量化指标。 在其中一些实施例中,所述方法还包括: 获取所述跟踪设备和所述终端设备之间的全局位姿序列; 4 CN 111582385 A 说 明 书 2/9 页 将用户设置的初始化时间作为自变量,根据所述全局位姿序列获取所述初始化时 间的绝对平移误差; 根据所述绝对平移误差获取所述SLAM质量的第三量化指标。 在其中一些实施例中,获取所述SLAM质量的所述第一量化指标、所述第二量化指 标和所述第三量化指标之后,所述方法还包括: 根据所述第一量化指标、所述第二量化指标和所述第三量化指标,对所述SLAM算 法进行优化。 在其中一些实施例中,所述根据所述第一实际位姿、所述第二实际位姿、所述第一 估计位姿和所述第二估计位姿,以所述预设间隔时间为自变量,获取所述AR物体的第一相 对平移误差包括: 根据所述第一实际位姿、所述第二实际位姿、所述第一估计位姿和所述第二估计 位姿,获取所述预设间隔时间的相对位姿误差; 获取所述相对位姿误差中的平移误差,并获取所述相对平移误差的第二均方根误 差,根据所述第二均方根误差获取所述第一相对平移误差。 第二方面,本申请实施例提供了一种SLAM质量的量化系统,其特征在于,所述系统 包括:控制装置和跟踪设备; 所述控制装置接收所述跟踪设备获取的预设时刻AR物体的第一实际位姿;并接收 所述跟踪设备获取的以所述预设时刻为起点的,间隔预设间隔时间的第二实际位姿; 所述控制装置通过SLAM算法获取所述预设时刻的所述AR物体的第一估计位姿;所 述控制装置通过所述SLAM算法获取以所述预设时刻为起点的,间隔所述预设间隔时间的第 二估计位姿; 所述控制装置根据所述第一实际位姿、所述第二实际位姿、所述第一估计位姿和 所述第二估计位姿,以所述预设间隔时间为自变量,获取AR物体的第一相对平移误差; 所述控制装置根据所述第一相对平移误差获取SLAM质量的第一量化指标。 在其中一些实施例中,所述系统还包括终端设备; 所述控制装置还用于获取所述终端设备的第二相对平移误差在预设阈值范围内 的第一均方根误差,所述控制装置根据所述第一均方根误差确定所述终端设备的抖动值; 所述控制装置获取所述第二相对平移误差大于或者等于预设阈值的累计值,并根 据所述累计值和总帧数获取跳变率; 所述控制装置根据所述抖动值和所述跳变率获取所述SLAM质量的第二量化指标。 在其中一些实施例中,所述控制系统还用于获取跟踪设备和终端设备之间的全局 位姿序列; 所述控制系统将用户设置的初始化时间作为自变量,根据所述全局位姿序列获取 所述初始化时间的绝对平移误差; 所述控制系统根据所述绝对平移误差获取所述SLAM质量的第三量化指标。 第三方面,本申请实施例提供了一种计算机设备,包括存储器、处理器以及存储在 所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时 实现如上述第一方面所述的SLAM质量的量化方法。 第四方面,本申请实施例提供了一种计算机可读存储介质,其上存储有计算机程 5 CN 111582385 A 说 明 书 3/9 页 序,该程序被处理器执行时实现如上述第一方面所述的SLAM质量的量化方法。 相比于相关技术,本申请实施例提供的SLAM质量的量化方法、系统、计算机设备和 存储介质,通过跟踪设备获取预设时刻的AR物体的第一实际位姿;并获取以该预设时刻为 起点的,间隔预设间隔时间的第二实际位姿;通过SLAM算法获取该预设时刻的所述AR物体 的第一估计位姿;并获取以该预设时刻为起点的,间隔所述预设间隔时间的第二估计位姿; 根据该第一实际位姿、该第二实际位姿、该第一估计位姿和该第二估计位姿,以该预设间隔 时间为自变量,获取该AR物体的第一相对平移误差;根据该第一相对平移误差获取SLAM质 量的第一量化指标,解决了SLAM质量的量化精度较低的问题。 本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他 特征、目的和优点更加简明易懂。 附图说明 此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申 请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中: 图1为根据本申请实施例的SLAM质量量化方法的流程图一; 图2为根据本申请实施例的SLAM质量量化方法的流程图二; 图3为根据本申请实施例的SLAM质量量化方法的流程图三; 图4为根据本申请实施例的SLAM质量量化方法的流程图四; 图5为根据本申请实施例的SLAM质量量化系统的结构框图一; 图6为根据本申请实施例的SLAM质量量化系统的结构框图二; 图7为根据本申请实施例的计算机设备的硬件结构示意图。











