
技术摘要:
本发明公开了一种便携式车轮几何参数测量系统及方法,属于轨道交通技术领域。本发明的测量系统中激光控制器控制激光传感器,激光传感器发出激光对车轮轮廓数据进行采集,编码器与计米轮相连,车轮侧面设置感应块,车轮转动时,感应块触发感应开关,激光控制器开始记录 全部
背景技术:
车轮作为轨道交通车辆振动的重要振源之一,其应用状况直接影响列车的行车安 全。来 自车轮的振动主要包括两个方面,一是车轮磨耗后产生的踏面形变,二是车轮加工 时产生的 偏心。对于新轮或刚镟修后的车轮,其踏面圆和轮缘顶点圆可以看成是同心的标 准圆,踏面 形变为0,即踏面径跳(以轮缘顶点圆心为基准的径跳)为0,但加工时的轴心与 轮缘顶点圆 心并不同心,即轴缘距(轴心与轮缘顶点圆心的距离)不为0,轴心径跳(以轴心 为基准的 径跳)也不为0。 随着车轮的磨耗,车轮踏面发生变形,由于轮缘顶点圆不发生磨耗,因此磨耗后的 车轮 踏面圆与轮缘顶点圆不再同心,但磨耗后的车轮踏面有着自己的当量圆心,即当量圆 心随着 车轮的磨耗发生了偏移,以当量圆心为基准的径跳称之为偏移径跳。当列车运行 时,车轮是 以当量圆心为基准在滚动,而车轮的振动需要用轴心径跳(踏面形为和偏心)来 衡量,因此 必须得到车轮的轴心径跳。 经检索,专利号为CN200720076529.7的实用新型专利,公开了一种便携式铁路车 轮不圆 度及直径测量装置,该装置将列车车轮抬起,使其能够以轴心为基准自由旋转,并 测量车轮 踏面一周的轮廓,得到车轮的不圆度(或径跳),该不圆度或径跳即为轴心径跳, 但该装置需 要将列车车轮一一抬起进行测量,测量效率低,测量精度也低。专利号为 CN200720082608.9 的实用新型专利,公开了一种升降式车轮踏面擦伤及不圆度在线动态 检测装置,该装置直接 安装在线路上,列车从设备上经过就能完成所有车轮的检测,检测 效率得到提高,但该装置 的检测原理是以轮缘顶点圆心为基准得到的踏面径跳,并不是轴 心径跳。 另外,专利号为CN200920266592.6的实用新型专利,公开了一种车轮圆周表面粗 糙度及 非圆化磨损便携式测量设备,其激光位移传感器的激光头固定在激光头支撑座上; 激光位移 传感器的串口、USB接口分别与计算机的串口和USB接口相连;小轮机构的小轮轴 连接有增 量光电编码器,增量光电编码器的信号输出端与激光位移传感器的控制信号输 入端相连,该 测量设备能在现场测量各种车轮圆周的表面粗糙度及非圆化磨损情况。专利 号为 201320613795.4的实用新型专利,公开了一种便携式轨道车辆车轮周向不平顺和直 径测量设 备,该测量设备磁性基座上表面的一侧与转臂的下端铰接,转臂上端的转轴与小 轮配合,该 转轴上安装有旋转编码器;转臂的中部通过张紧弹簧与磁性基座上表面的中部 连接;磁性基 座上表面另一侧固定有传感器支撑架,传感器支撑架的上端连接位移传感器 固定板,位移传 感器固定板上螺纹连接有位移传感器;光电触发器与数据采集器电连接, 数据采集器还与位 移传感器、旋转编码器电连接。该设备具有便于携带、易于安装拆卸的 优点。但上述申请案 同样存在测量参数单一、测量效率低的问题。 6 CN 111595263 A 说 明 书 2/10 页
技术实现要素:
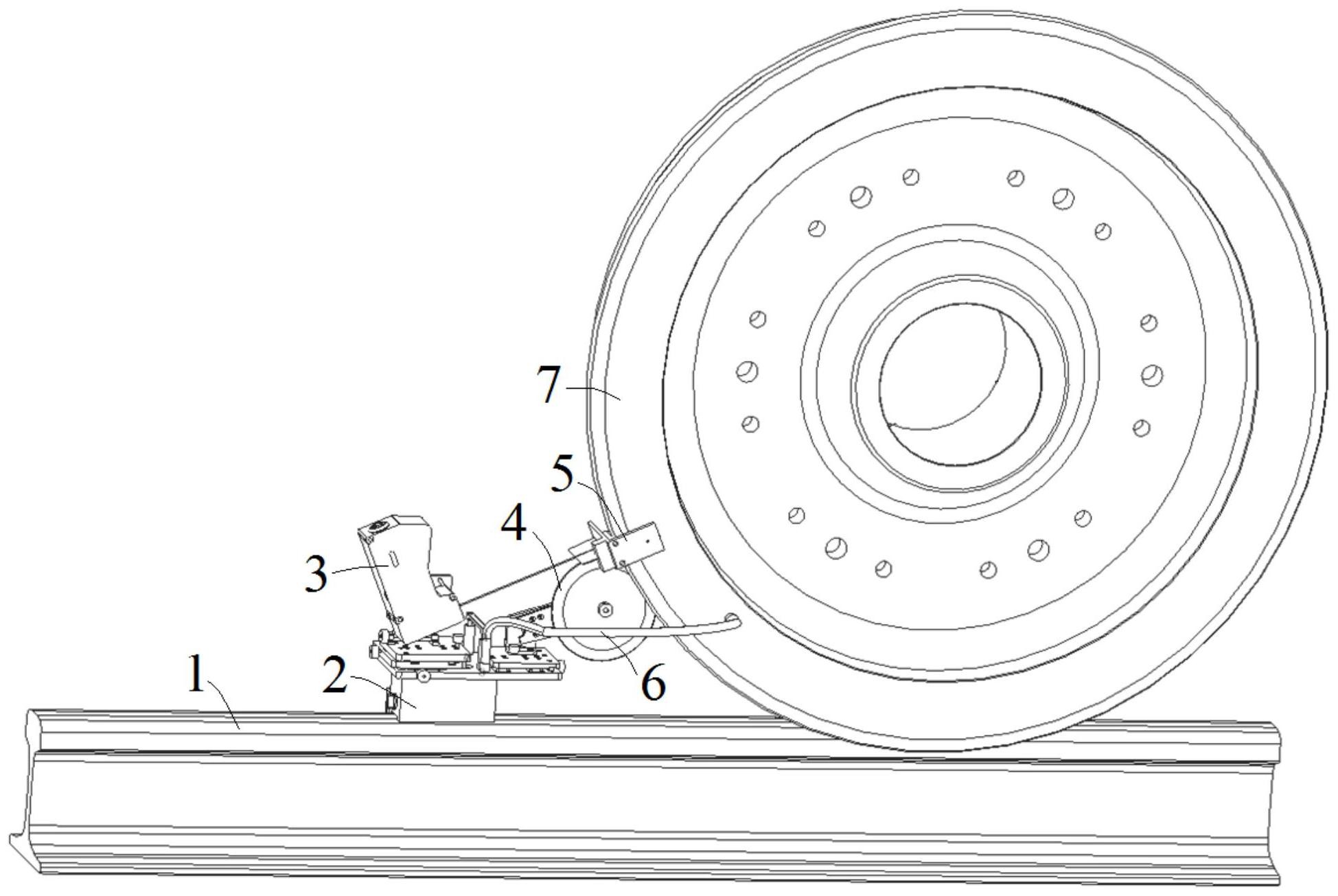
1.发明要解决的技术问题 本发明提供了一种便携式车轮几何参数测量系统及方法,使用本发明提供的参数 测量系 统能够一次测量获得车轮的直径、轮缘高、轮缘厚、轮缘综合值、踏面径跳、轴心径 跳、偏 移径跳、轴缘距、偏移系数等几何参数,以及车轮的轴向轮廓曲线、周向轮廓曲线等 直观显 示车轮应用状况的二维图形,同时,本发明还提供了踏面径跳向轴心径跳的转化方 法,为某 些仅能测量踏面径跳的检测设备提供一种得到轴心径跳的方法。 2.技术方案 为达到上述目的,本发明提供的技术方案为: 本发明的一种便携式车轮几何参数测量系统,包括激光控制器、激光传感器、计米 轮、 编码器和感应块,所述的激光控制器控制激光传感器,激光传感器发出激光对车轮轮 廓数据 进行采集,编码器与计米轮相连,计米轮紧贴车轮踏面,车轮侧面设置感应块,车轮 转动时, 感应块触发感应开关,激光控制器开始记录车轮轮廓数据,并且按编码器的触发 脉冲,每隔 一定的脉冲数据采集一条车轮轮廓曲线。 更进一步地,所述的测量系统包括激光调节单元,该激光调节单元包括底板、X方 向滑 板和Y方向滑板,X方向滑板设置于底板上,能够沿底板在X方向移动,底板上设置了X 方 向紧固旋钮,调节激光传感器至X方向需要的位置后,该X方向紧固旋钮定位X方向滑板, 使其不能移动;Y方向滑板设置于X方向滑板上,能够沿X方向滑板在Y方向移动,Y方向 滑板 上设置了Y方向紧固旋钮,调节激光传感器至Y方向需要的位置后,该Y方向紧固旋 钮作用 于X方向滑板,将Y方向滑板锁紧。 更进一步地,所述的激光调节单元还包括一激光角度调节组件,该激光角度调节 组件包 括水平角调节旋钮和激光安装板,激光安装板设置于Y方向滑板上,且激光安装板 与Y方向 滑板连接的一侧设置旋转轴,水平角调节旋钮通过旋转轴带动激光安装板旋转, 调节激光探 测光束的水平角;同时,激光安装板上开设有导向孔和定位孔,激光传感器上 的定位销插入 所述定位孔中,导向销插入所述导向孔中,通过调节导向销,使得激光传感 器以定位销为轴 旋转,调节激光探测光束的俯仰角。 更进一步地,所述的测量系统还包括计米轮调节单元,该计米轮调节单元包括活 动板、 支架、支撑板和编码器,活动板能够沿底板移动,活动板上设置了活动板紧固旋钮, 调节计 米轮至需要的位置后,该活动板紧固旋钮作用于底板将活动板锁紧;所述的计米轮 设置于支 撑板上并连接编码器,支撑板和支架之间设置滑块,支架设置于活动板上,滑块 内部设置弹 簧,滑块和弹簧的作用可将计米轮贴紧车轮踏面,当车轮转动时,带动计米轮 以相同的线速 度转动,计米轮的转动带动编码器发出脉冲信号。 本发明的一种车轮几何参数测量方法,其步骤为: 步骤一、利用所述的参数测量系统采集数据,获得踏面轴向轮廓曲线; 步骤二、对步骤一获得的每一条轮廓曲线进行计算,求取轮缘高、轮缘厚、轮缘综 合值 三个参数,并找到最大轮缘高、最小轮缘高、最大轮缘厚、最小轮缘厚、最大轮缘综合 值、 最小轮缘综合值以及所对应的轮廓曲线;再对所得所有轮廓曲线上每一个X坐标求平 均Y坐 标,输出车轮的平均轴向轮廓曲线; 步骤三、求取车轮直径,并提取周向轮廓曲线,根据提取的周向轮廓曲线,计算车 7 CN 111595263 A 说 明 书 3/10 页 轮径 向跳动; 步骤四、以轮缘顶点圆圆心为原点建立坐标系1,以轴心为原点建立坐标系2,分别 对两 个坐标系中的名义滚动圆轮廓进行圆拟合,求出拟合圆的圆心,即名义滚动圆的当量 圆心, 通过当量圆心相对于轮缘顶点圆圆心和轴心的偏移方向和距离,确定轴心坐标,求 得轴心径 跳。 更进一步地,步骤一中,参数测量系统一次测量只能得到部分车轮踏面轴向轮廓 曲线, 对于踏面轴向轮廓曲线的获得分为两种情况,第一种情况是车轮踏面类型已知,内 辋面到轮 缘顶点的距离d1,以及测量点到名义滚动圆的高度h1已知,只需测量包含轮缘顶 点和名义 滚动圆在内的部分轮廓,并与已知踏面类型后的内辋面到轮缘顶点部分的轮廓 进行拼接即可 得到踏面轴向轮廓曲线;第二种情况是车轮踏面类型未知,需要先测量包含 内辋面和轮缘顶 点在内的部分轮廓,再测量包含轮缘顶点和名义滚动圆在内的部分轮廓, 再将两段轮廓进行 拼接得到踏面轴向轮廓曲线。 更进一步地,第二种情况进行拼接的具体过程为: A.1、对所测轮廓中内辋面部分的轮廓进行直线拟合,得到拟合直线的斜率k; A .2、将轮廓按逆时针方向进行旋转,旋转角度为A度,A=90-arctank;旋转公式 为: X=(x-x0)cosA-(y-y0)sinA x0 Y=(x-x0)sinA (y-y0)cosA y0 式中,(X,Y)为旋转后的坐标,(x,y)为旋转前的坐标,(x0,y0)为旋转中心的坐标; 再将 旋转后得到的轮廓曲线与包含轮缘顶点和名义滚动圆在内的部分轮廓曲线进行拼 接,便可得 到车轮轴向轮廓曲线。 更进一步地,步骤二的具体过程为: B.1、提取步骤一所得每一条轮廓线中的Y坐标最大值,并保存于数组flangeY[n] 中,其 平均值为V_flangeY;并找到每一条轮廓线中轮缘顶点的X坐标,并保存于数组 flangeX[n] 中,同时求出平均值V_flangeX; B.2、根据内辋面到轮缘顶点的距离d1和V_flangeX,求出名义滚动圆的X坐标为 nominal_circleX=V_flangeX (70-d1),直接找到每一条轮廓线中X坐标为nominal_ circleX的 点,并提取该点对应的Y坐标,保存于数组nomimal_circleY[n]中,同时求出平 均值 V_nominal_circleY; B .3、求出每条轮廓线上A测量点和B测量点的Y坐标,分别为 AY[i]=nominal_ circleY[i] h1和BY[i]=flangeY[i]-2,并求出对应的X坐标,分别放于数组 AX[n]和BX [n]中,计算公式为: 式中,(AX1,AY1),(AX2,AY2)为所求A点左右两边最相近两点的坐标; BX的求解公式与AX相同,再求出A、B两点的平均X坐标为V_AX和V_BX; B.4、求轮缘三参数,其中, 轮缘高:Sh=V_flangeY-V_nominal_circleY 轮缘厚:Sd=d1 (V_AX-V_flangeY) 8 CN 111595263 A 说 明 书 4/10 页 轮缘综合值:Qr=V_AX-V_BX B.5、找到最大轮缘高、最小轮缘高、最大轮缘厚、最小轮缘厚、最大轮缘综合值、最 小 轮缘综合值以及所对应的轮廓曲线,提取这六条轴向轮廓曲线,再对所有轮缘线上每一 个X 坐标求平均Y坐标,输出车轮的平均轴向轮廓曲线。 更进一步地,步骤三的具体过程为: B.6、求取车轮直径D: 式中,N为采集车轮一周编码器发出的总脉冲数量,K为计米轮转动一周编码器发 出的 脉冲数量,C为计米轮周长; B.7、提取以轴心为基准的轮缘顶点圆的轮廓曲线,即flangeY[n];以轴心为基准 名义滚 动圆的轮廓曲线,即nominal_circleY[n];将上述提取的两个轮廓相差,即得到第 三条以轮缘 顶点圆圆心为基准的名义滚动圆轮廓曲线,即flange_nominal_circleY[n], 其值为 flange_nominal_circleY[i]=flangeY[i]-nominal_circleY[i]; B.8、计算提取的三个周向轮廓曲线中,每个轮廓曲线中的Y坐标最大值与Y坐标最 小 值的差值,也就是flangeY[n]、nomimal_circleY[n]、flange_nominal_circleY[n]三个 数据中 分别的最大值和最小值的差值,即分别为轴心基准轮缘顶点圆的径向跳动,轴心基 准名义滚 动圆径向跳动,以及轮缘顶点圆圆心基准名义滚动圆径向跳动。 更进一步地,步骤四的具体过程为: C.1、在坐标系1中对以轮缘顶点圆圆心为基准的名义滚动圆轮廓进行圆拟合,得 到拟合 圆圆心坐标(X1,Y1),并以该圆心坐标求得轮廓上各点的半径,其中最大半径与最小 半径的 差即为相对于轮缘顶点圆圆心的偏移径跳G1,而 为当量圆心相对于 轮缘顶点 圆圆心的偏心量; C.2、在坐标系2中对以轴心为基准的名义滚动圆轮廓进行圆拟合,得到拟合圆圆 心坐标 (X2,Y2),并以该圆心坐标求得轮廓上各点的半径,其中最大半径与最小半径的差即 为相对 于轴心的偏移径跳G2,而 为当量圆心相对于轴心的偏心量; C .3、求轴心在坐标系1中的坐标(X 3,Y 3),其中X 3=X 1-X 2,Y 3=Y1-Y 2,并且 即为轴心与轮缘顶点圆圆心的距离,即轴缘距;同时, 和(X3,Y3) 所在坐标系1中的限象位置,可以得到轴心与原点的连线与X轴方向的夹角; C.4、如只有以轮缘顶点圆圆心为基准的名义滚动圆轮廓,在计算轴心径跳时需要 将P3和cosα作为已知条件,因此可以通过方程组: 求出(X3,Y3)的坐标,其中Y3可求得两个解,根据轴心所在象限可以排除其中一个, 得到唯一的轴心坐标(X3,Y3),从而可以求得轴心径跳。 9 CN 111595263 A 说 明 书 5/10 页 3.有益效果 采用本发明提供的技术方案,与已有的公知技术相比,具有如下显著效果: (1)本发明的测量系统,结构设计简单易操作,利用该系统进行测量并对数据进行 处理 之后,能够得到车轮的踏面径跳、轴心径跳、偏移径跳、轴缘距、偏心量等,还可以得到 车 轮直径、轮缘高、轮缘厚、轮缘综合值等几何参数,得到的几何参数较全面,且能够获得 车 轮全周长范围内的几何参数,通过测量车轮全周长范围内的几何参数作平均值,比其他 在线 设备和便携设备只测车轮局部而获得的几何参数精度高出许多; (2)本发明还可以提取出车轮踏面任一位置的周向轮廓曲线,以及各种轴向轮廓 曲线, 包括最大轮缘高轴向轮廓曲线、最小轮缘高轴向轮廓曲线、最大轮缘厚轴向轮廓曲 线、最小 轮缘厚轴向轮廓曲线、最大轮缘综合值轴向轮廓曲线、最小轮缘综合值、平均轴向 轮廓曲线; 这些轮廓曲线都能较直观显示车轮应用状,为研究车轮振动提供参考; (3)本发明解析出将踏面径跳转化为轴心径跳的方法,结合在线测量设备测得的 车轮周 向轮廓,能够快速给出列车所有车轮轴心径跳,为某些仅能测量踏面径跳的检测设 备提供了 一种得到轴心径跳的方法。 附图说明 图1为本发明中固定单元的使用状态图; 图2为本发明中激光调节单元的结构示意图; 图3为本发明中激光调节单元的侧视结构示意图; 图4为本发明中激光角度调节组件的结构示意图; 图5为本发明中激光角度调节组件的侧视结构示意图; 图6中的(a)-(c)为本发明中计米轮调节单元的三视图; 图7中的(a)-(c)为本发明中激光角度调节块的三视图; 图8为本发明的测量模块的使用状态图; 图9中的(a)和(b)为本发明车轮踏面轴向轮廓曲线图; 图10中的(a)为原始数据中包含轮缘顶点和名义滚动圆在内的轮廓曲线图;图10 中的 (b)-(c)为测量轮缘顶点到内辋面距离时的数据旋转前后曲线图; 图11为车轮踏面轴向轮廓曲线图; 图12为实施例2所得六条轴向轮廓曲线图。 示意图中的标号说明: 1、轨道; 2、固定单元;21、固定座;22、吸座; 3、激光调节单元;31、底板;311、X方向滑轨;312、活动板滑轨;32、X方向滑板; 321、X方向滑槽;322、X方向驱动条;323、Y方向滑轨;33、X方向调节旋钮;34、X方 向紧固旋 钮;35、Y方向滑板;351、Y方向滑槽;352、Y方向驱动条;36、Y方向调节旋 钮;37、Y方向紧固 旋钮;38、水平角调节旋钮;39、激光安装板;391、导向孔;392、旋 转轴;310、激光传感器; 3101、定位销;3102、导向销; 4、计米轮调节单元;41、活动板;411、活动板滑槽;412、活动板驱动条;42、活动板 调节旋钮;43、活动板紧固旋钮;44、支架;45、支撑板;46、滑块;47、计米轮;48、编 码器; 10 CN 111595263 A 说 明 书 6/10 页 5、激光角度调节块;51、调节块本体;511、第一调节缝;52、角度调节柱;53、侧耳; 531、第二调节缝; 6、软管; 7、车轮。











