
技术摘要:
本发明公开了复合式无人机半实物仿真系统,属于系统仿真技术领域。该系统包括数学模型、三轴转台、缩比样机、三维视景模块、飞行数据监测模块和飞行控制模块。首先建立真实无人机A的仿真数学模型,将无人机A的状态量输入到飞行控制模块中,解算出控制量驱动无人机A舵面 全部
背景技术:
复合式无人机是近年来受到广泛关注的一种新型构型的具备垂直起降能力的飞 行器,这种构型的飞行器采用固定翼飞机和四旋翼套件通过结构上的简单结合得到,具有 技术实现门槛较低和成本低廉等优点。 在飞行器研制中,仿真是不可或缺的支撑手段,它对提高飞行器设计质量,降低研 制成本,缩短研制周期具有极其重要的作用。据统计,仿真技术可缩短飞行器研制周期20% ~40%,节约定型试验样本数10%~30%,减少试验次数50%~80%,缩短联调时间40%~ 60。 半实物仿真作为仿真技术的一个分支,是计算机软件、数学模型、系统部件(或设 备)与物理效应装置(或模拟器)相结合的仿真方式,为包括飞行器在内的复杂工程系统必 不可少的主要仿真方法和手段。由于半实物仿真技术可实现人和硬件在回路仿真,且模拟 的逼真度和可信度相对较高,对飞行器研制至关重要。 最近几年,国内外在飞行器仿真方面,逐渐流行采用快速原型化方法设计。所谓快 速原型化就是应用Matlab/Simulink模块框图对飞行控制系统和无人机建立系统模型,进 行全数字仿真设计。然后利用RTW(Real-Time Workshop)将无人机模型直接从Simulink模 块中产生优化的、可移植的嵌入式实时代码,将其下载至装有Vxworks或RTX等实时操作系 统的嵌入式计算机上进行仿真。 目前针对常规固定翼以及四旋翼的半实物仿真系统的设计已有不少,但是关于复 合式无人机的半实物仿真系统的设计相对缺乏。复合式无人机采用固定翼和旋翼复合设 计,搭载固定翼动力系统和四旋翼动力系统两套动力系统,具有可行性高,机械结构简单, 经济成本低和安全系数高等优点。工作原理是:在垂直起降阶段和低速阶段按照四旋翼模 态飞行,通过电机旋转带动螺旋桨转动,从而产生飞行需要的拉力;而在高速状态下,切换 至固定翼模态飞行,通过机翼翼面产生的气动升力克服重力,通过推力发动机产生的推力 克服气动阻力实现飞行。 搭建复合式无人机半实物仿真系统可以有效的降低研制成本,在半实物仿真系统 中完成对于飞行控制律的验证和参数的选择等,尤其是对于过渡阶段的控制律的设计与验 证,可以在进行外场飞行前减少试验飞行风险,并且可以尽可能的通过地面仿真系统实验 模拟和解决飞行过程中可能出现的故障和问题,所以对于复合式无人机的半实物仿真系统 的设计是很有必要的。 已知现有文献1中,公布号为CN108008646A的《一种无人机航电半实物仿真系统》, 建立了包括飞行仿真、三维视景和接口及仿真控制台等模块,但是该方案针对的是无人直 升机,且并没有物理转台及缩比样机的动态展示,以及对于飞行仿真过程中的数据监测及 显示。文献2中,公布号为CN102789171A的《一种可视化无人机飞行控制半实物仿真测试方 5 CN 111596571 A 说 明 书 2/10 页 法及系统》,建立了无人机系统动力学模型及驱动无人机的三维仿真模型。但是该方案并没 有说明针对哪种类型的无人机,且同样缺少物理转台及缩比样机的动态展示。
技术实现要素:
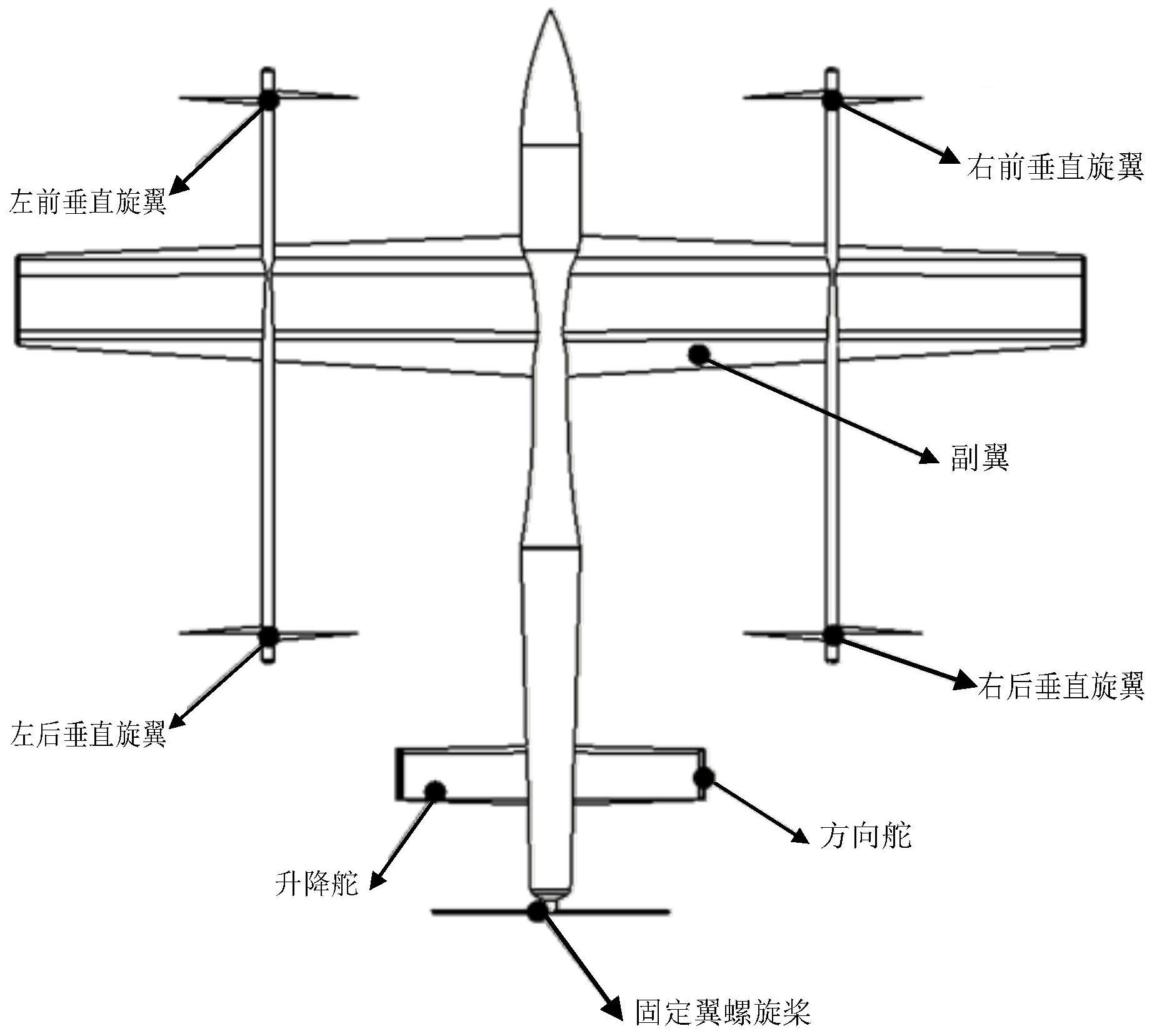
本发明针对上述问题,提出了一套针对复合式无人机的半实物仿真系统。通过建 立复合式无人机数学模型来完成无人机的姿态和位置解算,输出无人机的姿态角、位置、速 度和加速度等信息;通过飞行控制模块进行飞行航迹规划和飞行姿态控制,输出舵量、固定 翼电机以及四旋翼电机的油门等控制量;设计物理三轴转台来展示复合式无人机的姿态变 化;设计复合式无人机缩比样机来展示复合式无人机的舵面、四旋翼电机和固定翼电机的 动作;设计飞行数据监测模块来监测仿真过程中无人机数学模型状态量的变化;设计三维 视景模块实现数字飞机全流程仿真垂直起飞、模态切换、盘旋和垂直降落飞行的视景展示, 从而实现复合式无人机半实物仿真系统的设计和搭建。 所述的复合式无人机半实物仿真系统包括:数学模型、三轴转台、缩比样机、三维 视景模块、飞行数据监测模块、飞行控制模块、地面站以及各个部分之间的通信模块。 其中数学模型、三维视景模块、飞行数据监测模块和地面站运行在PC机中;三轴转 台、缩比样机和飞行控制模块为实物。通过一路串口通信实现复合式无人机数学模型和飞 行控制模块之间的数据传递;通过另一路串口通信实现复合式无人机数学模型和三轴转台 的数据通信;复合式无人机缩比样机放置在三轴转台上,三轴转台的输出信号来控制复合 式无人机缩比样机中电机与舵面的运动。 所述复合式无人机数学模型是指在PC机中对真实无人机A进行仿真建模后得到的 仿真数学模型,仿真数学模型包括电机模块,气动力及力矩解算模块和六自由度运动方程 模块,主要用来完成模型无人机A的姿态和位置解算。 将模型无人机A的位置、姿态和速度等状态信息输入到飞行控制模块,经过飞行控 制模块中控制律的解算,得到模型无人机A目前状态的舵量、固定翼电机油门和四旋翼电机 油门等控制量; 飞行控制模块将这些控制量再次反馈到仿真数学模型中的电机模块以及气动力 及力矩解算模块中解算出力和力矩,并将力和力矩输入到六自由度运动方程模块中解算得 到模型无人机A的姿态、位置、速度和加速度等信息,形成闭环通信; 所述三轴转台用来实现对模型无人机A姿态运动的物理展示,三轴转台依靠三个 串联的运动框架能进行三个自由度的运动,即俯仰运动、滚转运动以及偏航运动。三轴转台 包括舵机、角度传感器和单片机;舵机作为驱动器,角度传感器作为姿态测量器,单片机作 为控制器。 三个串联的运动框架包括:俯仰运动框架、滚转运动框架和偏航运动框架,框架采 用半“工”字形;采用滑环进行PWM信号的传输;采用单片机作为控制器,接收数学模型发出 的模型无人机A的三个姿态角信号,通过单片机中的定时器功能按照一定规律输出PWM波控 制舵机驱动三个串联的运动框架,实现转台的运动,同时采用角度传感器测得三轴转台的 姿态角。 所述缩比样机固定在三轴转台的上方,借助三轴转台的运动带动缩比样机,实现 缩比样机姿态角的变化;单片机同时接收数学模型发出的舵量、四旋翼电机油门和固定翼 6 CN 111596571 A 说 明 书 3/10 页 电机油门等控制信号,控制缩比样机中舵面的偏转、四旋翼电机和固定翼电机的转动,保持 缩比样机的动态与模型无人机A在PC机中仿真运行的动态相同。 所述飞行数据监测模块,对模型无人机A在运行过程中的姿态角、姿态角速度、经 纬度和高度等信息进行采集和曲线化显示,快速判断模型无人机A的当前运行状态,对飞行 过程中存在异常的飞行数据及对应时间进行标记,也可以对之前的飞行数据进行回放。 所述三维视景模块用来展示模型无人机A的全流程飞行,在PC机中通过3D建模搭 建的无人机A的三维模型,并导入三维视景模块中,通过输入模型无人机A的副翼、方向舵和 升降舵三个舵面、固定翼电机、四旋翼电机的动作来驱动三维模型中相应的结构进行运动, 并通过输入经纬度、高度和姿态来改变三维模型在三维视景模块中的位置和姿态,实现模 型无人机A的三维模拟飞行。 所述的复合式无人机半实物仿真方法,具体步骤如下: 步骤一、在MATLAB/Simulink软件中建立针对复合式无人机A的仿真数学模型; 仿真数学模型包括电机模块、气动力及力矩解算模块和六自由度运动方程模块; 电机模块在频域下的数学建模方程如下: ω表示电机转速,CR表示电机曲线系数,δ表示电机油门,取值在0~1之间,ωb表示 电机曲线常数,Tm表示电机响应时间常数,s表示频域下的微分项。 F=Ct*ω*ω F表示单个电机产生的力,Ct表示单桨拉力系数。 气动力及力矩解算模块的输入为飞行器的迎角α,侧滑角β,升降舵偏角δe,副翼偏 角δa,方向舵偏角δr,输出为气动力和气动力矩。 气动力及力矩方程如下: 作用在飞行器上的空气动力分解为阻力D,升力L和侧力C,CD是阻力系数,CC是侧力 系数,L是升力系数,ρ是空气密度,V是飞行速度,S是飞行器的参考面积; 空气动力力矩分解为滚转力矩Lroll,俯仰力矩M,偏航力矩N,Cl是滚转力矩系数,Cm 是俯仰力矩系数,Cn是偏航力矩系数,b是机翼展长,CA是机翼平均气动弦长。 六自由度运动方程如下: 质心动力学方程: 7 CN 111596571 A 说 明 书 4/10 页 (u,v,w)表示机体坐标系中x,y,z轴的速度分量, 表示机体坐标系中x,y,z 轴的速度变化率,(p,q,r)为机体坐标系中x,y,z轴的角速度分量。(φ,θ,ψ)为机体坐标系 中x,y,z轴的滚转角、俯仰角和偏航角。g表示重力加速度,m表示无人机的质量,Fx,Fy,Fz表 示无人机收到的合外力在机体坐标系x,y,z中的分量; 转动动力学方程: (Ix,Iy,Iz)为飞行器绕x,y,z轴的转动惯量,Izx为飞行器绕zx轴的惯性积; 质心运动学方程: 表示地球坐标系中飞行器三轴位置的变化率。 转动运动学方程: 其中, 为滚转角变化率、俯仰角变化率和偏航角变化率; 步骤二、将模型无人机A的状态量通过串口通讯模块输入到飞行控制模块中,通过 控制律解算出控制量,驱动模型无人机A舵面和电机油门进行动作; 状态量包括模型无人机A的位置、姿态、速度和加速度等; 所述的控制律设计包括四旋翼模态下的控制律设计,固定翼模态下的控制律设计 以及过渡模态的控制律设计。 对于四旋翼模态,控制律设计包括纵向外环高度控制-内环俯仰角控制;航向外环 航向距离/速度控制-内环航向角控制;横向外环横向距离/速度控制-内环滚转角控制。 对于固定翼模态,控制律设计包括纵向外环高度-内环俯仰角控制;航向水平位 置/航向控制;横向外环侧偏距离-内环滚转角控制;以及空速控制。 对于过渡模态的控制,对四旋翼模态的控制律以及固定翼模态的控制律按照控制 要求进行一定的组合得到对于过渡模态的控制。 步骤三、模型无人机A运动过程中的姿态角数据通过串口通讯模块传递给三轴转 台的单片机,单片机控制舵机驱动三个串联的俯仰运动框架、滚转运动框架和偏航运动框 8 CN 111596571 A 说 明 书 5/10 页 架运动,进一步带动缩比样机,实现缩比样机的俯仰、滚转和偏航三自由度的姿态运动展 示; 步骤四、模型无人机A运动过程中的控制数据通过串口通讯模块传递给三轴转台 的单片机,单片机输出控制信号控制缩比样机的舵面偏转,四旋翼电机和固定翼电机的转 动来展示模型无人机A的舵量,四旋翼电机和固定翼电机的油门大小; 控制数据包括舵量、四旋翼电机油门和固定翼电机油门等; 步骤五、飞行数据监测模块实时监测模型无人机A在飞行过程中的位置、姿态、速 度、舵面偏角、固定翼电机的油门和四旋翼电机转速等状态量,绘制曲线变化并显示实时的 状态量数据。 步骤六、通过UDP通信将模型无人机A的舵面动作,经纬度,高度、速度,俯仰角等信 息传递给三维视景模块,从而实现模型无人机A起降的全流程视景展示。 本发明的优点在于: (1)本发明一种复合式无人机半实物仿真系统,通过设计复合式无人机缩比样机, 可以更加直观的观察到复合式无人机在飞行过程中舵面、四旋翼电机、固定翼电机的动作 及变化趋势;通过固定在三轴转台上,三轴转台运动时带动缩比样机运动,可以模拟飞机在 飞行时的姿态变化 (2)本发明一种复合式无人机半实物仿真系统,通过设计飞行数据监测模块,实现 对于复合式无人机数学模型运行过程中的数据监测,快速的了解复合式无人机的飞行状 态、分析飞行时复合式无人机的特点以及飞行过程中的数据变化; (3)本发明一种复合式无人机半实物仿真系统,通过设计三维视景模块,可以通过 三维视景软件,直观地展示出复合式无人机三维模型从起飞到降落的全过程; (4)本发明一种复合式无人机半实物仿真系统,可以有效节省复合式无人机控制 系统开发过程中的成本,提高效率,同时可实现人机交互,进行仿真飞行训练。 附图说明 图1为本发明中复合式无人机结构示意图; 图2为本发明中设计的三轴转台示意图; 图3为本发明中复合式无人机缩比模型示意图; 图4为本发明中复合式无人机半实物仿真方法的原理图; 图5为本发明复合式无人机半实物仿真方法的流程图。











