
技术摘要:
本发明公开一种谐振式陀螺闭环控制方法与系统,包括驱动、检测模态下,驱动、检测方向振动位移信号的采集和转换;驱动位移信号经驱动环路生成控制信号输入驱动电极激励谐振子在驱动方向恒幅振动;检测位移信号分两路,一路经正交误差抑制环路输入检测电极;另一路经力 全部
背景技术:
陀螺仪是测量载体相对惯性空间旋转运动的传感器,是航空航天、卫星导航、远洋 潜航、姿态测量等领域的核心器件,在航空航天、智能机器人、制导弹药等高端工业装备和 精确打击武器中具有非常重要的应用价值。传统的陀螺仪包括机械转子陀螺、静电陀螺、半 球谐振陀螺、激光陀螺、光纤陀螺等,它们精度普遍较高,但同时具有体积大、功耗高、价格 高等缺点,越来越难以适应信息化时代对于小体积和低功耗的需求。基于微机电系统技术 的MEMS陀螺仪具有体积小、功耗低、寿命长、可批量生产、价格便宜等诸多特点,在大批量和 小体积的工业和武器装备应用中具有先天优势。但与传统陀螺仪相比,目前MEMS陀螺仪的 精度还不够高,应用主要局限于智能手机、微型无人机、汽车稳定控制系统等低端领域。卫 星导航抗干扰抗欺骗、室内导航、微小型水下无人平台、单兵定位、地下随钻定向系统等新 兴领域对高性能、小体积、低功耗、低成本MEMS陀螺仪提出了迫切需求。 标度因数是指陀螺输出数据与输入角速度之间的比值,即单位角速度输入对应陀 螺输出值的大小。对于谐振式微机械陀螺而言,无论是开环控制模式还是力平衡闭环控制 控制,外界环境因素(尤其是温度)的变化均会对标度因数的大小产生很严重的影响,导致 标度因数的稳定性和重复性变差。对于高精度导航系统而言,标度因数的不稳定性会造成 极大的累积误差,限制陀螺精度水平的发挥。传统的标度因数控制方法主要是基于标度因 数和各系统参数随环境变化的测试数据进行的拟合补偿法,需要进行大量的前期数据测试 来确定拟合补偿函数,同时需要陀螺保持良好的稳定性才能保证整体的补偿精度。这样的 方法不但耗时耗力,而且难以适用于状态可能发生变化的陀螺。因此,研究陀螺标度因数的 闭环方法,对提高标度因数的稳定性具有重要的意义和价值。
技术实现要素:
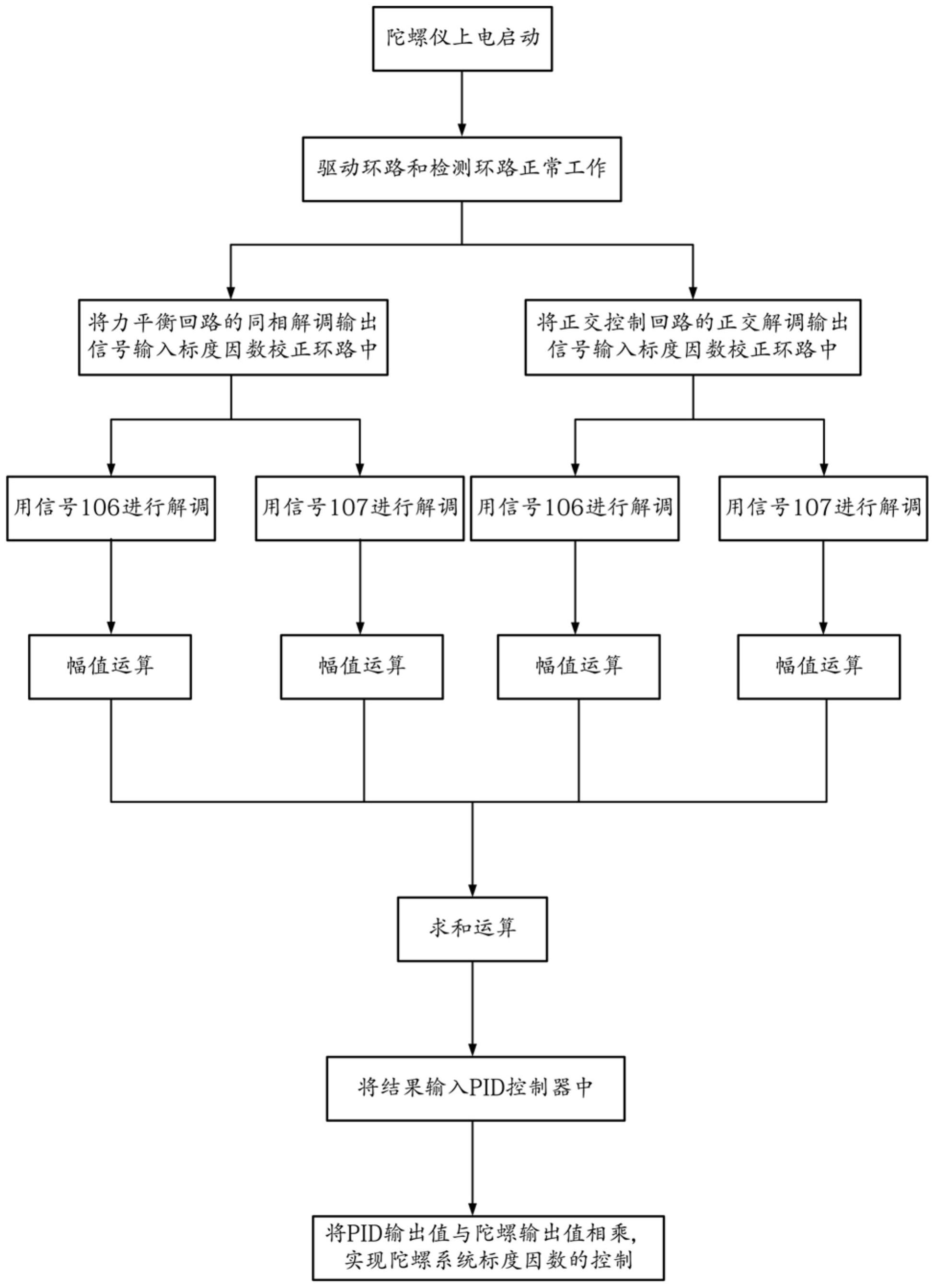
本发明提供一种谐振式陀螺闭环控制方法、系统及陀螺仪,用于克服现有技术中 对陀螺的稳定性要求较高导致适应性较差、需要大量前期数据导致耗时费力等缺陷,通过 闭环控制,在状态变化过程中对陀螺标度因数进行自动补偿,将标度因数稳定在较高值附 近,以提高陀螺在运行状态下标度因数的稳定性。 为实现上述目的,本发明提供一种谐振式陀螺闭环控制方法,包括以下步骤: 步骤1,驱动模态下,采集表征陀螺仪驱动方向振动位移的第一信号输入驱动环 路;检测模态下,采集表征陀螺仪检测方向振动位移的第二信号输入检测环路; 步骤2,第一信号经转换和解调、闭环控制、调制生成驱动控制信号输入驱动电极 以激励谐振子在驱动方向恒幅振动; 第二信号分成两路,一路经正交解调、处理后生成控制信号输入正交误差修调电 5 CN 111578923 A 说 明 书 2/14 页 极以抑制正交误差信号;另一路经力平衡环路解调、处理后生成角速度检测信号即陀螺输 出信号,将陀螺输出信号与校正解调信号叠加得到带扰动的反馈力信号; 步骤3,对经正交误差抑制环路解调后的信号及经力平衡环路解调后的信号分别 进行信号解调和幅值提取运算;对所述幅值进行运算获得标度补偿信号;将角速度检测信 号与所述校正解调信号叠加后与标度补偿信号进行幅值运算,得到的信号输入检测电极 中,标度补偿信号的大小控制带扰动反馈力信号的幅值,以实现对陀螺仪的标度因数自动 补偿。 为实现上述目的,本发明还提供一种谐振式陀螺闭环控制系统,包括: 驱动环路,用于在驱动模态下,对输入的第一信号进行转换和解调、闭环控制、调 制,最终生成驱动控制信号输入驱动电极,以激励谐振子在驱动方向恒幅振动;所述第一信 号用于表征陀螺仪驱动方向的振动位移; 检测环路,用于检测陀螺仪输入的轴向的角速度;包括: 正交误差抑制环路,用于在检测模态下,对输入的第二信号进行解调、处理生成正 交控制信号输入正交误差修调电极,以抑制正交误差信号; 力平衡环路,用于在检测模态下,对输入的第二信号进行解调、处理生成角速度的 检测信号,该信号输入检测电极后会产生静电力,用于抵消由输入角速度产生的哥氏力,使 得谐振子在检测方向上维持静止的平衡状态;所述第二信号用于表征陀螺仪检测方向的振 动位移; 标度补偿环路,用于对经正交误差抑制环路解调后的信号及经力平衡环路解调后 的信号分别进行信号解调和幅值运算;对所述幅值进行以设定值为目标的PID控制运算,获 得标度补偿信号; 所述力平衡环路,还用于将角速度检测信号与所述校正解调信号叠加后与标度补 偿信号进行幅值运算输入检测电极,以实现对陀螺仪的标度因数自动补偿。 本发明提供的谐振式陀螺闭环控制方法与系统,在通过正交误差抑制环路的闭环 控制和力平衡环路检测的基础上,通过标度补偿环路调整陀螺的输出从而实现对标度因数 控制,补偿标度因数随环境的变化量,使系统的标度因数处于一定的稳定状态,从而在实现 陀螺低噪声角速度检测的同时,保证了标度因数的稳定性。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图示出的结构获得其他的附图。 图1a为谐振式微机电陀螺简并模态中第一模态即驱动模态示意图; 图1b为谐振式微机电陀螺简并模态中第二模态即检测模态示意图; 图2为本发明实施例一提供的谐振式陀螺闭环控制方法中力平衡模式角速度测量 流程图; 图3为本发明实施例一提供的谐振式陀螺闭环控制方法中标度因数补偿环路工作 流程图; 6 CN 111578923 A 说 明 书 3/14 页 图4为本发明实施例二提供的谐振式陀螺闭环控制系统的原理框图; 图5为标度补偿环路(标度因数控制回路)的具体结构框图; 图6为驱动环路的仿真结果; 图7为正交误差抑制环路的仿真结果; 图8为力平衡环路的仿真结果; 图9为不同角速度下陀螺稳定状态的输出曲线图。 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











