
技术摘要:
本发明公开了一种车辆主动安全控制方法及装置,将获取到的车辆状态参数输入至预先建立的主动安全控制模型进行计算,得到运动学表示的车辆横向速度估计值和动力学表示的车辆横向速度估计值并进行伪积分计算,得到车辆横向车速最终估计值,将车辆横向车速最终估计值进行 全部
背景技术:
随着社会经济的发展,道路交通安全问题日益突出。为降低交通事故的发生,车辆 主动安全系统的发展尤为重要。车辆主动安全系统能够防患于未然,主动避免交通事故的 发生。 目前,常见的主动安全系统主要包括防抱死制动系统(Antilock Brake System, ABS),车辆电子稳定程序(Electronic Stability Program,ESP),牵引力控制系统 (Traction Control System,TCS),电控驱动防滑系统(Acceleration Slip Regulation, ASR),四轮转向稳定控制系统(4 Wheel Steering,4WS)等。 这些系统可以分为车辆纵向控制系统和车辆横向控制系统两大类。在车辆横向控 制系统和车辆横向控制系统中,均涉及车辆侧向速度与质心侧偏角等运行状态的测量。车 辆质心侧偏角被定义为车辆行驶速度方向与车辆纵轴之间的夹角,数值上可以表达为横向 车速与纵向车速比值的反正切值,质心侧偏角的精度直接关系车辆的行驶安全性与稳定 性。 现有技术中,车辆质心侧偏角的获取有三种途径,第一种是利用高精度全球定位 系统(Global Positioning System,GPS)、光电五轮仪或高精度光学传感器等高精度传感 器来确定车辆相对于地面的纵向车速和横向车速,从而计算得到车辆质心侧偏角,但由于 高精度全球定位系统GPS、光电五轮仪或高精度光学传感器等高精度传感器的价格高,且对 安装位置精度要求高,从而未得到广泛应用;第二种是利用运动学方法,建立运动学模型, 在运动学模型中,基于横向加速度和横摆角速度传感器信号的直接积分法或利用车辆轴距 和前轮转角等运动几何关系估计车辆质心侧偏角,但是,运动学方法对传感器信号偏差和 噪声要求极高,仅适应于横向车速变化频率较高时,难于适应横向车速变化频率较低的工 况;第三种即利用动力学方法,在车辆横向动力学模型的基础上,通过现代控制理论中的观 测器技术估计车辆质心侧偏角,但是,动力学方法依赖于估计模型和参数的精确性,仅适合 于横向车速变化频率较低的工况,难于适应于横向速度变化频率较高的工况。 因此,通过上述技术,所获取到的车辆质心侧偏角的精度低,从而导致主动安全系 统控制效果差,造成车辆的行驶安全性能降低。
技术实现要素:
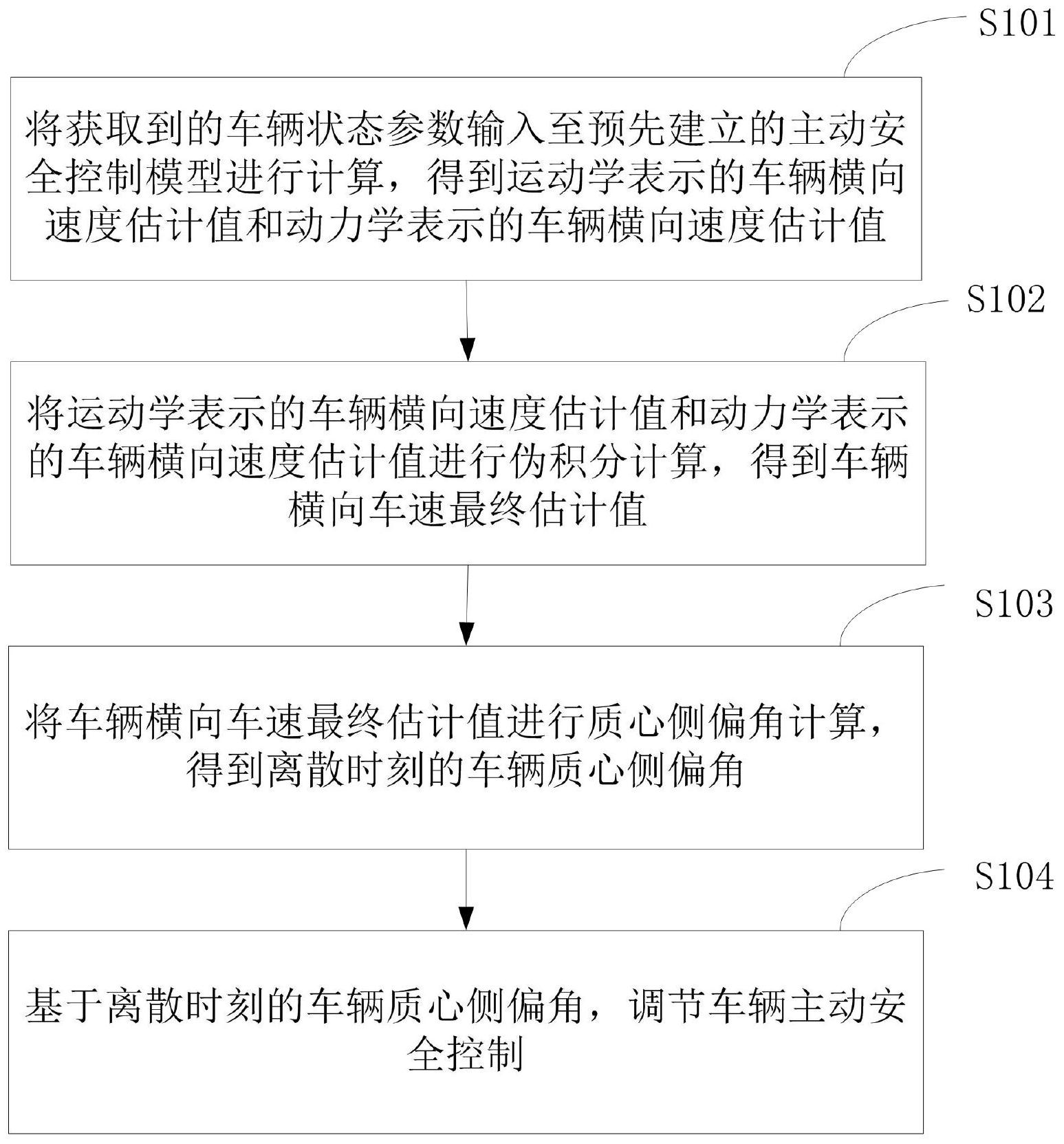
有鉴于此,本发明公开了一种车辆主动安全控制方法及装置,通过计算出精度高 的离散时刻的车辆质心侧偏角和离散时刻的车辆质心侧偏角,调节车辆主动安全控制,从 而提高车辆的行驶安全性能。其公开的技术方案如下: 第一方面,本发明公开了一种车辆主动安全控制方法,所述方法包括: 5 CN 111572552 A 说 明 书 2/13 页 将获取到的车辆状态参数输入至预先建立的主动安全控制模型进行计算,得到运 动学表示的车辆横向速度估计值和动力学表示的车辆横向速度估计值,其中,所述主动安 全控制模型包括运动学模型和动力学模型,所述运动学模型用于计算并输出所述运动学表 示的车辆横向速度估计值,所述动力学模型用于计算并输出所述动力学表示的车辆横向速 度估计值; 将所述运动学表示的车辆横向速度估计值和所述动力学表示的车辆横向速度估 计值进行伪积分计算,得到车辆横向车速最终估计值; 将所述车辆横向车速最终估计值进行质心侧偏角计算,得到离散时刻的车辆质心 侧偏角,其中,所述离散时刻的车辆质心侧偏角为各个时刻的车辆质心侧偏角的集合; 基于所述离散时刻的车辆质心侧偏角,调节车辆主动安全控制。 可选地,将获取到的车辆状态参数输入至预先建立的主动安全控制模型进行计 算,得到运动学表示的车辆横向速度估计值,包括: 获取车辆前轮轮轴中心到质心的距离、车辆后轮轮轴中心到质心的距离和前轮转 向角; 将所述车辆前轮轮轴中心到质心的距离、所述车辆后轮轮轴中心到质心的距离和 所述前轮转向角输入至所述运动学模型进行递归最小二乘算法计算,得到运动学表示的车 辆横向速度估计值。 可选地,将获取到的车辆状态参数输入至预先建立的主动安全控制模型进行计 算,得到动力学表示的车辆横向速度估计值,包括: 获取车辆横向加速度、车辆横摆角速度、车辆前轮侧偏刚度、车辆后轮侧偏刚度、 车辆前轮侧偏角和车辆后轮侧偏角; 将所述获取车辆横向加速度、所述车辆横摆角速度、所述车辆前轮侧偏刚度、车辆 后轮侧偏刚度、车辆前轮侧偏角和车辆后轮侧偏角输入至所述动力学模型进行递归最小二 乘算法计算,得到动力学表示的车辆横向速度估计值。 可选地,所述将所述运动学表示的车辆横向速度估计值和所述动力学表示的车辆 横向速度估计值进行伪积分计算,得到车辆横向车速最终估计值,包括: 将所述运动学表示的车辆横向速度估计值和所述动力学表示的车辆横向速度估 计值进行伪积分计算,得到车辆横向车速最终估计值,其中,所述车辆横向车速最终估计值 的计算式为: 其中, 为车辆横向车速最终估计值,w1为基于运动学的估计方法在频域内的估 计系数,w2为基于动力学的估计方法在频域内的估计系数, s为拉 普拉斯算子,τ为时间常数, 为所述运动学表示的车辆横向速度, 为所述动力学表示的 车辆横向速度。 可选地,所述将所述车辆横向车速最终估计值进行质心侧偏角计算,得到车辆质 心侧偏角,包括: 基于所述车辆横向车速最终估计值,确定各个时刻车辆的侧向速度; 6 CN 111572552 A 说 明 书 3/13 页 将预先获取到的各个时刻车辆的纵向速度和所述各个时刻车辆的侧向速度进行 质心侧偏角计算,得到车辆质心侧偏角; 其中,所述离散时刻的车辆质心侧偏角的计算式为: β(k)=arctan[vy(k)/vx(k)] 其中,vy(k)为各个时刻车辆的侧向速度,vx(k)为各个时刻车辆的纵向速度,β(k) 为各个时刻的车辆质心侧偏角。 第二方面,本发明公开了一种车辆主动安全控制装置,所述装置包括: 第一计算单元,用于将获取到的车辆状态参数输入至预先建立的主动安全控制模 型进行计算,得到运动学表示的车辆横向速度估计值和动力学表示的车辆横向速度估计 值,其中,所述主动安全控制模型包括运动学模型和动力学模型,所述运动学模型用于计算 并输出所述运动学表示的车辆横向速度估计值,所述动力学模型用于计算并输出所述动力 学表示的车辆横向速度估计值; 第二计算单元,用于将所述运动学表示的车辆横向速度估计值和所述动力学表示 的车辆横向速度估计值进行伪积分计算,得到车辆横向车速最终估计值; 第三计算单元,用于将所述车辆横向车速最终估计值进行质心侧偏角计算,得到 离散时刻的车辆质心侧偏角,其中,所述离散时刻的车辆质心侧偏角为各个时刻的车辆质 心侧偏角的集合; 调节单元,用于基于所述离散时刻的车辆质心侧偏角,调节车辆主动安全控制。 可选地,将获取到的车辆状态参数输入至预先建立的主动安全控制模型进行计 算,得到运动学表示的车辆横向速度估计值的所述第一计算单元,包括: 第一获取模块,用于获取车辆前轮轮轴中心到质心的距离、车辆后轮轮轴中心到 质心的距离和前轮转向角; 第一计算模块,用于将所述车辆前轮轮轴中心到质心的距离、所述车辆后轮轮轴 中心到质心的距离和所述前轮转向角输入至所述运动学模型进行递归最小二乘算法计算, 得到运动学表示的车辆横向速度估计值。 可选地,将获取到的车辆状态参数输入至预先建立的主动安全控制模型进行计 算,得到动力学表示的车辆横向速度估计值的所述第一计算单元,包括: 第二获取模块,用于获取车辆横向加速度、车辆横摆角速度、车辆前轮侧偏刚度、 车辆后轮侧偏刚度、车辆前轮侧偏角和车辆后轮侧偏角; 第二计算模块,用于将所述获取车辆横向加速度、所述车辆横摆角速度、所述车辆 前轮侧偏刚度、车辆后轮侧偏刚度、车辆前轮侧偏角和车辆后轮侧偏角输入至所述动力学 模型进行递归最小二乘算法计算,得到动力学表示的车辆横向速度估计值。 可选地,所述第二计算单元,具体用于: 将所述运动学表示的车辆横向速度估计值和所述动力学表示的车辆横向速度估 计值进行伪积分计算,得到车辆横向车速最终估计值,其中,所述车辆横向车速最终估计值 的计算式为: 其中, 为车辆横向车速最终估计值,w1为基于运动学的估计方法在频域内的估 7 CN 111572552 A 说 明 书 4/13 页 计系数,w2为基于运动学的估计方法在频域内的估计系数, s为拉 普拉斯算子,τ为时间常数, 为所述运动学表示的车辆横向速度, 为所述动力学表示 的车辆横向速度。 可选地,所述第三计算单元,包括: 确定模块,用于基于所述车辆横向车速最终估计值,确定各个时刻车辆的侧向速 度; 第三计算模块,用于基于预先获取到的各个时刻车辆的纵向速度和所述各个时刻 车辆的侧向速度进行质心侧偏角计算,得到离散时刻的车辆质心侧偏角; 其中,所述离散时刻的车辆质心侧偏角的计算式为: β(k)=arctan[vy(k)/vx(k)] 其中,vy(k)为各个时刻车辆的侧向速度,vx(k)为各个时刻车辆的纵向速度,β(k) 为各个时刻的车辆质心侧偏角。 经由上述技术方案可知,获取车辆状态参数,将车辆状态参数输入至预先建立的 主动安全控制模型进行计算,得到运动学表示的车辆横向速度估计值和动力学表示的车辆 横向速度估计值并进行伪积分计算,得到车辆横向车速最终估计值,将车辆横向车速最终 估计值进行质心侧偏角计算,得到离散时刻的车辆质心侧偏角,基于离散时刻的车辆质心 侧偏角,调节车辆主动安全控制。通过上述方案,分别计算出运动学表示的横向车速估计值 和动力学表示的横向车速估计值并结合,得到车辆横向车速最终估计值,最终计算出精度 高的离散时刻的车辆质心侧偏角,通过离散时刻的车辆质心侧偏角调节车辆主动安全控 制,从而提高车辆的行驶安全性能。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图获得其他的附图。 图1为本发明实施例公开的一种车辆主动安全控制方法的流程示意图; 图2为本发明实施例公开的方向盘转角和车辆的纵向前进速度具体随时间的变化 过程的示意图; 图3为本发明实施例公开的车辆质心侧偏角与车辆行驶速度方向与车辆纵轴之间 的夹角的示意图; 图4为本发明实施例公开的动力学模型经等效简化后构成的自行车模型Bicycle 的结构图; 图5为本发明实施例公开的车辆质心侧偏角的结果曲线与Carsim的参考输出值的 对比图; 图6为本发明实施例公开的得到运动学表示的车辆横向速度估计值的流程示意 图; 图7为本发明实施例公开的得到动力学表示的车辆横向速度估计值的流程示意 8 CN 111572552 A 说 明 书 5/13 页 图; 图8为本发明实施例公开的一种车辆主动安全控制装置的结构示意图。











