
技术摘要:
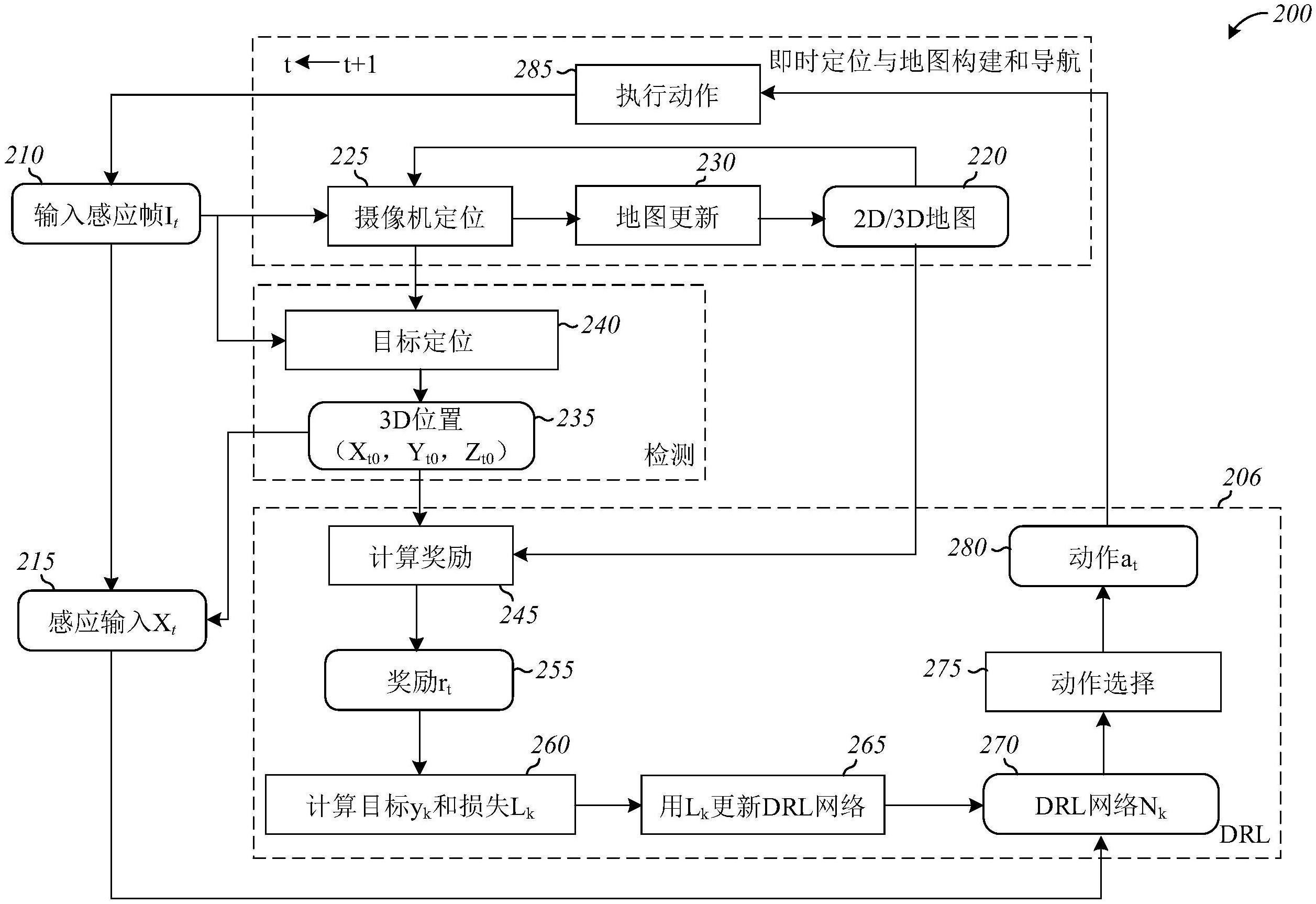
一种跟踪对象和导航对象跟踪机器人的系统和方法,包括:多次接收代表所述对象和环境的跟踪传感器输入;响应于所述跟踪传感器输入,多次计算所述机器人和所述对象的位置;使用被训练为跟踪质量奖励和机器人导航路径质量奖励的函数的由计算机实现的深度强化学习(deep rei 全部
背景技术:
对于家庭服务机器人而言,跟踪运动的对象是一项重要的功能。例如,机器人可跟 随主人以提供必要的辅助,或机器人可出于家庭安全原因跟随可疑人员。 几十年来,在该领域,人们一直在积极研究对视频中对象的跟踪,例如,跟踪监控 视频中的车辆来进行交通监控,或跟踪监控视频中的人来进行安全监控。在这些先前的研 究中,所用的摄像机或位置固定,或被动式移动。也就是说,摄像机运动并非由对象跟踪方 法所控。例如,在监控视频中,摄像机通常是固定的,视频中出现的摄像机运动大多是来自 各种原因所致的摄像机晃动。 家庭服务机器人跟踪运动对象与上述视频中的对象跟踪任务大相径庭。所述机器 人是运动的平台,需要在动态的环境中进行导航。即,除跟踪目标对象外,所述机器人还能 自主决定:如何移动以跟踪所述运动对象;同时,如何在已知或未知环境中进行导航;以及, 如何在所述环境中避开其他障碍物(例如其他运动或静止的对象)。 即时定位与地图构建(simultaneous localization and mapping,简称SLAM)技 术使得机器人能在已知或未知的环境中进行导航。通过SLAM技术,所述机器人建立并维持 已知或未知环境的2D/3D地图,同时,在所述建立的环境地图中定位自身(判断自身的位 置)。其他技术,例如强化学习(reinforcement learning,简称RL),也被用于帮助机器人在 预先建立的环境地图中进行导航和躲避障碍物。所述地图中存在动态的小型变化组件,例 如静态障碍物或运动障碍物。
技术实现要素:
现描述各种示例从而以简化的形式引入概念的选择,这些概念将在下面进行进一 步的细致描述。本











