
技术摘要:
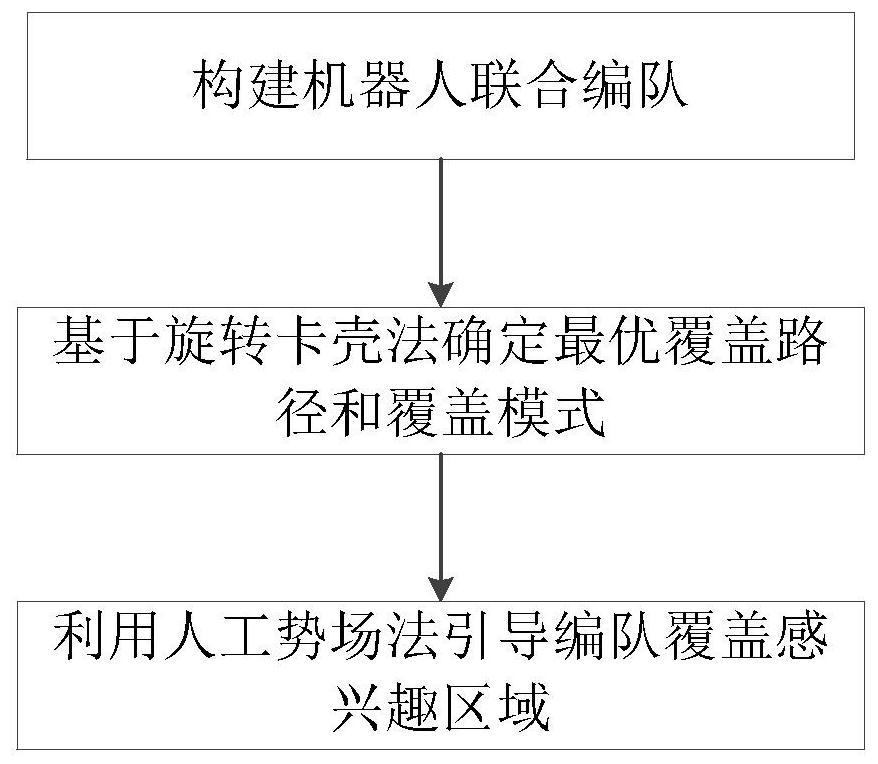
本发明公开了一种基于联合编队的移动机器人最优路径覆盖方法,包括以下步骤:构建机器人联合编队;基于旋转卡壳法确定机器人联合编队覆盖感兴趣区域的最优覆盖路径和覆盖模式;利用人工势场法引导机器人联合编队根据最优覆盖路径和覆盖方式对感兴趣区域进行覆盖。本发 全部
背景技术:
土壤质量是农业可持续发展的关键。农民多年来一直使用重型农业机械来提高经 营效率。然而,重型农机的压力更容易传递到更深的土壤中,重复耕作会使耕层以下的土层 变得更厚、更密。这些密密麻麻的土层不仅使根系难以穿透,而且使水分也难以穿透,既影 响作物生长,又加剧土壤侵蚀。在严重的情况下,作物产量将减少80%。因此,用多台轻型农 业机器人联合作业代替单一的重型农机单独作业,是提高作业效率、减少土壤破坏的有效 方法。然而,多台农业机器人需要多个操作工,增加了农业生产的劳动力成本。因此,许多农 机的自主运行已成为一个必须克服的科研问题。全区域路径覆盖规划(CPP)问题是解决农 业机械自主作业的关键问题之一。CPP技术有着广泛的应用,如清洁、水下作业、农业和救援 作业等。一般来说,农业机器人路径覆盖问题可以描述为:农业机器人从起点开始用最短的 时间沿着最短的路径覆盖整片土地。最后,在高覆盖率和低重复率的情况下得到最优路径。 迄今为止,全覆盖路径规划方法已被广泛研究,如随机覆盖方法、细胞分解方法、 神经网络方法和元启发式方法。Le提出了一种利用俄罗斯方块启发的自重构机器人“h- Tetro”优化区域覆盖的方法。通过“h-Tetro”的形状变换,有效地解决了覆盖狭窄空间约束 的问题。但该方法重复率太高,高达28%。Galceran使用了一种基于随机轨迹优化的重新规 划方法,在任务过程中实时重塑了标称路径。在给定车辆位置误差的范围内,重新规划方法 能够根据车载距离传感器的测量值来调整标称路径。Latombe提出了梯形细胞分解方法,解 决了随机覆盖方法覆盖率低的问题。该方法根据障碍物的位置将工作空间分解为若干个互 不重叠的梯形单元。机器人基于前后移动访问每个单元,然后通过邻接图移动到另一个单 元,直到覆盖整个工作空间。该方法能保证机器人覆盖整个区域,但单元间存在冗余运动, 导致路径规划的重叠率高、效率低。Ni提出了一种动态仿生神经网络(BINN),利用虚拟目标 策略帮助AUV有效地找到从起始位置到目标的最优或次优路径。该方法在神经元活动更新 方程中引入目标吸引子,以提高生物激励神经网络实时路径规划的计算效率。然而,基于 BINN的路径规划方法仍存在一些局限性,即:没有任何环境或任务的先验知识,使得整个规 划效率低下。Mohanty提出了一种新的自然界激励元启发方法,以便于移动机器人在一个未 知或部分已知的环境中规划路径。本元启发方法基于寄生虫行为,当机器人到达目的地时, 最佳的平滑轨迹与此方法相符。Mitchell提出了一种启发式方法,允许它们实时计算有界 次优结果。该方法产生的结果使得一组机器人能够在长时间内持续有效地覆盖给定的目标 或任务集。然而,这种方法适用于很少的场景。
技术实现要素:
本发明的目的在于提供一种基于联合编队的移动机器人最优路径覆盖方法。 4 CN 111580514 A 说 明 书 2/7 页 实现本发明目的的技术解决方案为:一种基于联合编队的移动机器人最优路径覆 盖方法,所述方法包括以下步骤: 步骤1,构建机器人联合编队; 步骤2,基于旋转卡壳法确定机器人联合编队覆盖感兴趣区域的最优覆盖路径和 覆盖模式; 步骤3,机器人联合编队根据所述最优覆盖路径和覆盖方式对感兴趣区域进行覆 盖。 进一步地,步骤1所述构建机器人联合编队,具体包括: 步骤1-1,确定机器人联合编队队形以及形成该队形所需的最少机器人数; 步骤1-2,构建机器人联合编队中机器人智能体间信息交互的通信拓扑模型; 步骤1-3,建立机器人联合编队的动力学模型。 进一步地,步骤1-1中所述机器人联合编队队形为倒“V”型,至少包括三个机器人, 分别设置于“V”型的三个顶点。 进一步地,步骤1-2所述构建机器人联合编队中机器人智能体间信息交互的通信 拓扑模型,具体包括: 利用有向图建立机器人联合编队的通信拓扑模型,包括: 邻接矩阵An,定义为:aij=1,表示节点j可以接收节点i的状态信息;否则aij=0, aij为邻接矩阵An中第i行第j列的元素; 度矩阵Dn,定义为:在n个节点的有向加权图中,度矩阵Dn为Dn=diag{dii},其中dii 表示节点i的输入阶, 拉普拉斯矩阵Ln:Ln=Dn-An。 进一步地,步骤1-3所述建立机器人联合编队的动力学模型为: limt→∞||ri(t)-rj(t)||=0 limt→∞||vi(t)-vj(t)||=0 式中,ri代表位移,vi代表速度,ui为控制输入,Lij为机器人联合编队的拉普拉斯矩 阵,α和β为固定常数,ri(t)为t时刻i点的位置,rj(t)为t时刻j点的位置,vi(t)为t时刻i点 的速度,vj(t)为t时刻j点的速度。 进一步地,步骤2所述基于旋转卡壳法确定机器人联合编队覆盖感兴趣区域的最 优覆盖路径和覆盖模式,具体包括: 步骤2-1,获取感兴趣区域的最小外接凸边形; 步骤2-2,确定所述最小外接凸边形的所有对应点对,所述对应点为凸边形的顶 点,所述对应点对的定义为:一对平行线中的两条直线分别经过两个对应点,记所述直线为 支撑线; 步骤2-3,针对每个对应点对对应的所有平行线对,求取每对平行线中两条支撑线 5 CN 111580514 A 说 明 书 3/7 页 之间的垂直距离; 步骤2-4,从所有平行线对中选取最短的垂直距离对应的平行线对,设定最优覆盖 路径为位于该平行线对之间且与平行线对相平行的若干轨迹,轨迹的数目为 或 其 中L为该平行线对之间的垂直距离,l为机器人联合编队的宽度; 针对轨迹数目为 相邻轨迹之间的距离为机器人联合编队的宽度;针对轨迹数 目为 前 个轨迹中相邻轨迹之间的距离为机器人联合编队的宽度; 步骤2-5,设定覆盖模式为折返模式。 进一步地,步骤3所述机器人联合编队根据最优路径和覆盖方式对感兴趣区域进 行覆盖,具体为:基于最优覆盖路径和覆盖方式,利用人工势场法引导机器人联合编队对感 兴趣区域进行覆盖。 本发明与现有技术相比,其显著优点为:1)针对凸多边形区域的地块路径覆盖问 题,提出的旋转卡壳算法可以保证时间上相对非最优轨迹减少了48.7%,且拐弯次数也比 非最优状况少;2)对于旋转卡壳算法获得轨迹设计编队控制算法,控制倒“V”型编队对获得 轨迹进行复现,路径覆盖的覆盖率可达99.4%、重复率不超过0.8%,冗余覆盖率不超过 0.8%;3)相对于其他的路径覆盖算法,结合旋转卡壳算法与编队控制算法,在保证规划轨 迹时间最优的同时还确保了规划轨迹的实用性。 下面结合附图对本发明作进一步详细描述。 附图说明 图1为一个实施例中基于联合编队的移动机器人最优路径覆盖方法的流程图。 图2为一个实施例中轻型机器人倒“V”型编队结构图。 图3为一个实施例中轻型机器人前后折返模式图。 图4为一个实施例中旋转卡壳方法的原理图,其中图(1)、(2)为对应点对(1,4)的 两对平行支撑线示意图。 图5为一个实施例中编队模型图。 图6为一个实施例中基于旋转卡壳方法路径覆盖的路径仿真结果图。 图7为一个实施例中基于旋转卡壳方法路径覆盖的覆盖仿真结果图。











