
技术摘要:
本发明涉及一种控制棒驱动机构落棒时间测量方法,通过安装在驱动机构内与传动机构连接处的角位移传感器测量驱动机构的实际转动角度,当系统发出机构复位指令时,记录当前系统时间t1,当检测到角位移传感器测量的旋变值与系统设定的目标值之间的差值小于第一阈值时,记 全部
背景技术:
核反应堆控制棒落棒时间是进行核电厂安全分析,保证核电厂安全运行的重要参 数之一。同时,落棒时间也作为考核反应堆驱动机构设计是否合理可行的一个重要指标。 现有核电站的控制棒落棒时间是通过棒位置监测系统探测器线圈感应电压和驱 动机构内线圈电流的变化进行测量的。而针对一些特殊小型堆,结构复杂、紧凑,堆型与常 规反应堆有较大差异,因而对控制棒落棒时间测量的起点和重点判据也不同。传统的探测 线圈感应电压和驱动机构内线圈电流的测量方法难以在这些特殊堆型中应用,因此,需要 设计一种新的控制棒驱动机构落棒时间测量方法。
技术实现要素:
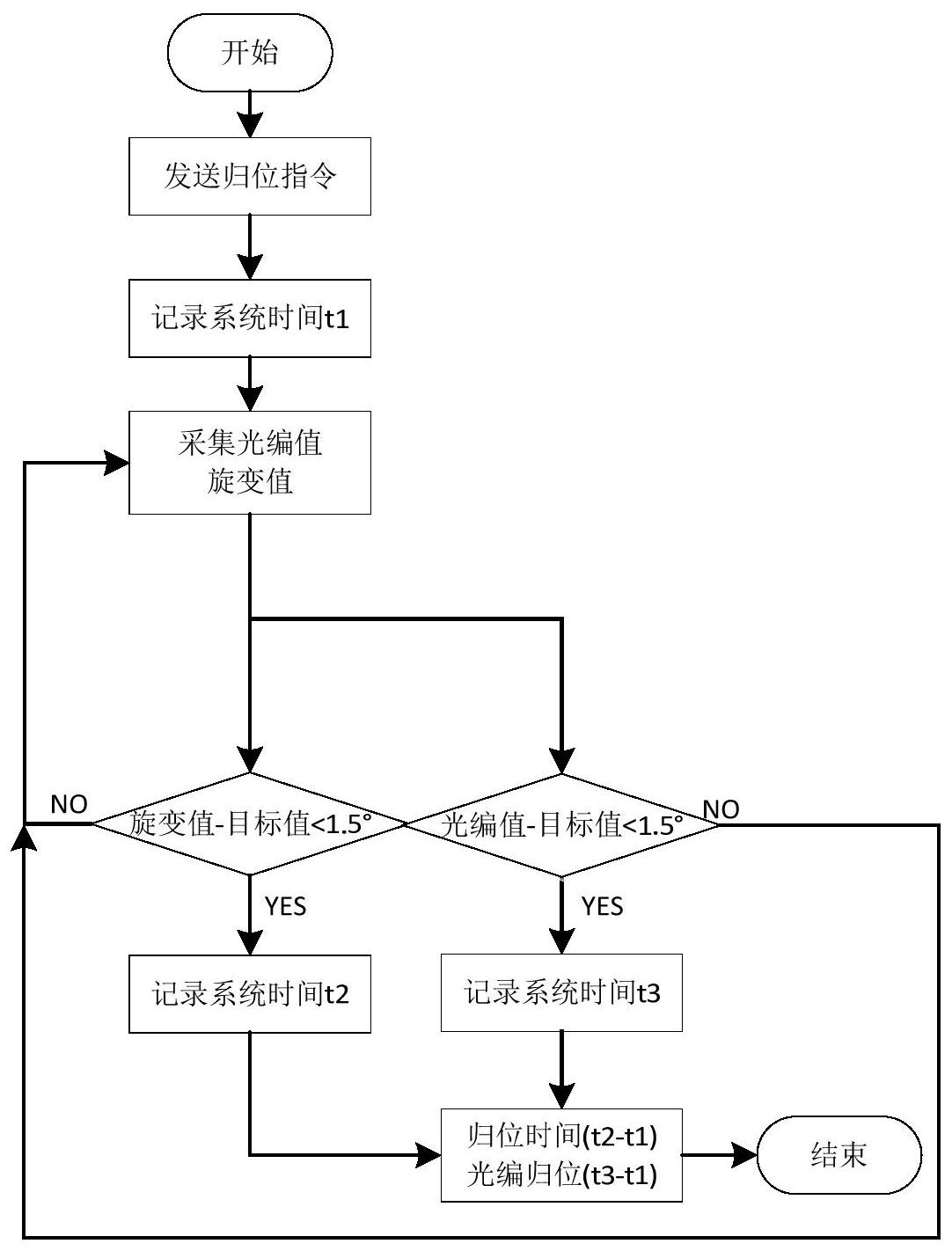
本发明的目的在于针对小型堆复杂特殊的驱动机构,提供一种控制棒驱动机构落 棒时间测量方法,实现落棒时间的准确测量。 本发明的技术方案如下:一种控制棒驱动机构落棒时间测量方法,通过安装在驱 动机构内与传动机构连接处的角位移传感器测量驱动机构的实际转动角度,当系统发出机 构复位指令时,记录当前系统时间t1,当检测到角位移传感器测量的旋变值与系统设定的 目标值之间的差值小于第一阈值时,记录当前的系统时间t2,两次时间的差值(t2-t1)就是 控制棒驱动机构的落棒时间。 进一步地,根据本发明控制棒驱动机构落棒时间测量方法的优选实施方案,通过 安装在控制棒驱动机构的控制鼓组件上的光电编码器测量控制鼓组件的实际转动角度,当 系统发出机构复位指令时,记录当前系统时间t1,当检测到光电编码器测量的光编值与系 统设定的目标值之间的差值小于第二阈值时,记录当前的系统时间t3,两次时间的差值(t3- t1)作为对控制棒驱动机构落棒时间的校验。 进一步地,根据本发明控制棒驱动机构落棒时间测量方法的优选实施方案,通过 综合测试平台的旋变处理器获取角位移传感器测量的旋变值,通过光编采集板卡获取光电 编码器测量的光编值,并将数据传输给测控软件进行处理。综合测试平台对所述旋变值和 光编值的采集频率为20ms。 进一步地,根据本发明控制棒驱动机构落棒时间测量方法的优选实施方案,所述 第一阈值为0~1.5°,所述第二阈值为0~1.5°。 与现有技术相比,本发明的有益效果如下: (1)本发明提供的控制棒驱动机构落棒时间测量方法,不依赖于监测系统的电压 或电流信号,通过旋转角度的变化及时准确地确定控制棒驱动机构复位时刻,操作性强、可 靠性高; 3 CN 111599499 A 说 明 书 2/4 页 (2)通过角位移传感器测量的旋变值和光电编码器测量的光编值相互验证,可以 保证测量的合理性,并有助于及时发现控制系统结构设计中存在的问题并进行修正; (3)本发明在角位移传感器出现故障时,依然可以依靠光电编码器测量的光编值 确定控制棒驱动机构复位时刻,从而进一步提高了系统的实用性。 附图说明 图1为本发明实施例中控制棒驱动机构落棒时间测量方法的流程图; 图2为本发明实施例中机构归位测试的系统逻辑结构图。











