
技术摘要:
本发明公开了农用机器人领域内的一种喷洒农药用机器人,包括车架和安装在车架上的控制机构、信息采集机构以及农药喷洒机构,车架包括上车架和下车架,控制机构安装在下车架上,农药喷洒机构安装在上车架上;信息采集机构包括安装在下车架前、后侧的灰度传感器,以及安 全部
背景技术:
农业是我国最大的产业,农业的发展现在也逐步趋向于自动化,从播种、管理到收 获均越来越自动化,在对农作物进行田间管理的过程中,进行施肥、打农药去除病虫害是非 常重要的环节,对农作物的产量有较大的影响。传统的农药采用背负式药箱和手持式喷枪, 利用手摇式的气压部件将混合在水中的农药呈雾状喷洒到农作物的叶片上,主要通过人为 主观控制喷洒,劳动强度大,只适合小面积的农药喷洒,不满足大范围农田的农药喷洒需 求。而在逐渐自动化的过程中,对农田中农作物与杂草等区分、农作物生长情况的识别成为 难题,不加以区分识别,会造成杂草愈发茂盛、农作物生长愈发不均的情况,反而对农作物 生长不利,特别是对藤作物和低矮植物的农药喷洒,因为具备一定的高度范围和种植区域 限定,对农作物的识别准确度要求更高。
技术实现要素:
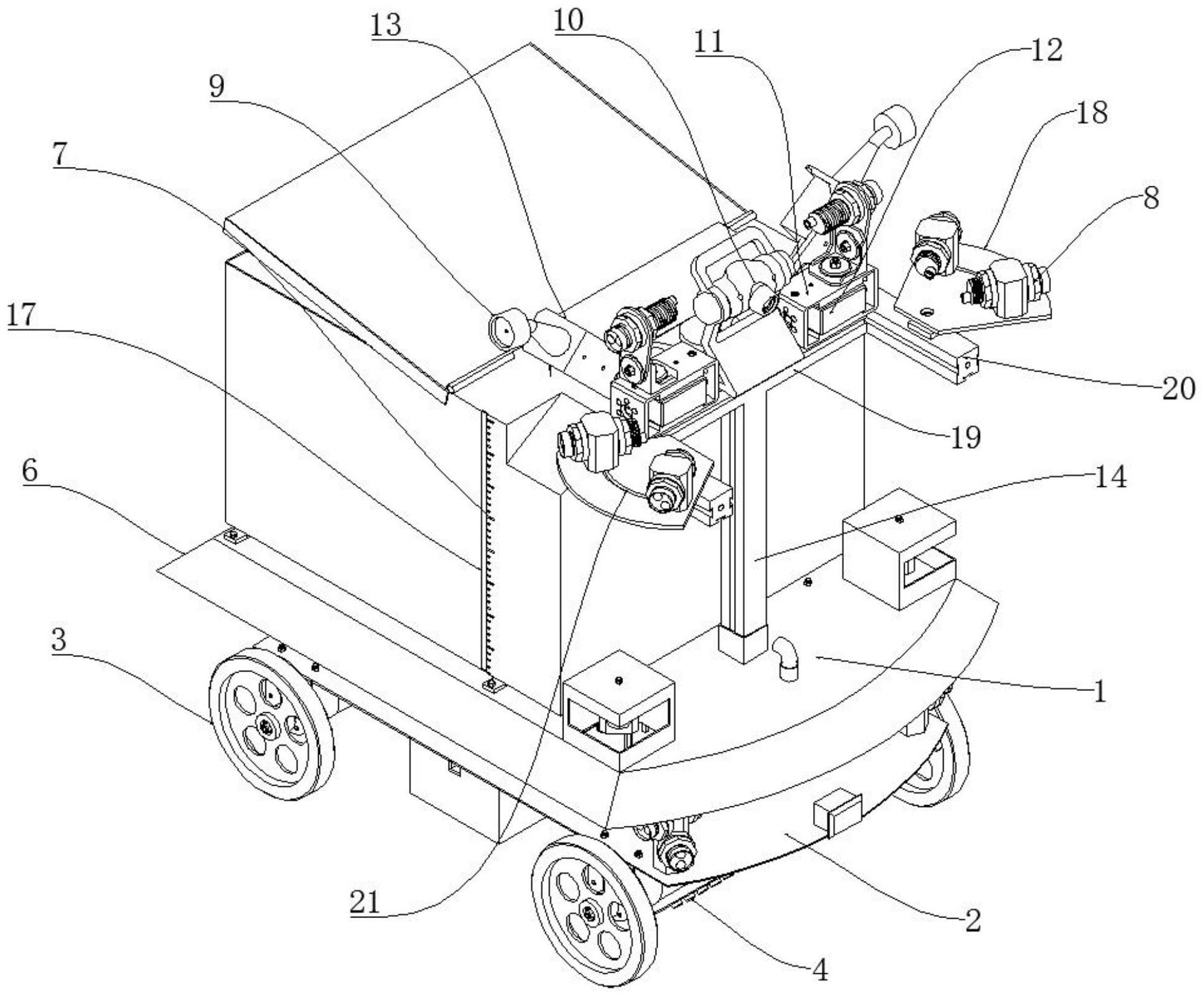
本发明意在提供一种喷洒农药用机器人,对藤作物和低矮植物自动进行准确识别 并喷洒农药,以解决现有技术中不能对藤作物和低矮植物准确识别喷洒农药的问题。 为达到上述目的,本发明的基础技术方案如下:一种喷洒农药用机器人,包括车架 和安装在车架上的控制机构、信息采集机构以及农药喷洒机构,车架包括上车架和下车架, 控制机构安装在下车架上,农药喷洒机构安装在上车架上;信息采集机构包括安装在下车 架前、后侧的灰度传感器,以及安装在上车架、下车架前侧的距离传感器,以及安装在上车 架前侧的识别摄像头,识别摄像头、距离传感器、灰度传感器、农药喷洒机构均与控制机构 信号连接。 本方案的原理及优点是:实际应用时,车架作为机器人的移动载体,可安装车轮载 着各部件移动行进,信息采集机构用于采集外界农作物的识别信息、距离信息、车架前进的 方向信息等,农药喷洒机构用于存储农药和喷洒农药。采用分开的上车架和下车架,能够将 不同功能的部件分开安装,对于主要进行信息运算的控制机构可进行分隔保护,农药喷洒 机构安装在上车架上便于农药的调配和对农作物的立体式喷洒农药;将灰度传感器安装在 下车架前后侧,通过灰度传感器对田间预设的路径白线进行识别可实时、有效的对机器人 行进路线进行修正,让机器人走直线达到准确的路径规划,使得能够对农作物进行准确的 喷洒,达到不误喷;距离传感器对农作物的距离进行识别,识别摄像头对杂草和不同生长情 况、虫害的农作物进行颜色识别分析,两者结合实现对农作物的准确识别,再将信号传输给 控制机构,控制机构从而控制农药喷洒机构对农作物进行准确的喷洒农药。距离传感器、识 别摄像头能够在一定高度范围内对农作物进行准确识别,配合位于上车架上的农药喷洒机 构,能够对藤作物和低矮植物进行立体的农药喷洒,农药的喷洒全面且准确。 进一步,信息采集机构还包括固定在上车间前侧的三维滑台,三维滑台包括X杆、Y 3 CN 111587872 A 说 明 书 2/5 页 杆和Z杆,Z杆竖向固定在上车架前侧的中部,X杆横向转动连接在Z杆的顶端且连接点位于X 杆的中部,Y杆有两个且分别横向转动连接在X杆的两端,Y杆与X杆相互垂直,Y杆和X杆上均 分布有距离传感器。作为优选X杆、Y杆均可转动,并且Z杆提供一定高度,使得其上分布的距 离传感器能够在三维空间内灵活改变测量的位置和角度,能够更大范围更全面的对周围的 农作物进行感知识别。 进一步,识别摄像头安装在X杆的中部顶面。作为优选这样识别摄像头位于机器人 行进中线的高处,能够更大范围的对周围的农作物情况进行图像采集,进而更准确的对农 作物生长情况进行判断以准确喷洒农药。 进一步,下车架的底部安装有前、后两组车轮,灰度传感器居中设置在每组车轮之 间的下车架下方,灰度传感器与下车架之间连接有连接杆。作为优选这样灰度传感器位于 车架的下方更贴近地面,能够更加准确的对田间地面上预设的白线标识进行识别,并且居 中的设置能够更准确的判断机器人下一步行进的方向。 进一步,每个Y杆上均螺栓连接有扇形板,每个扇形板上均设有扇形通槽,每个扇 形通槽的两端均螺栓连接有距离传感器。作为优选这样通过扇形板安装的两个距离传感器 能够呈扇形对较大范围内的农作物进行感知,且两个距离传感器之间的距离可以调节,配 合X杆上的距离传感器能够从不同位置全方位的对农作物进行感知识别,有利于准确的判 断农作物位置进行精准喷洒农药。 进一步,农药喷洒机构包括药箱,药箱内设有至少两个药液泵,每个药液泵均连接 有一个喷头,药箱螺栓连接在三维滑台后侧的上车架上。作为优选药箱用于盛装农药液体, 药液泵将药箱内的农药输送给不同的喷头,喷头将农药喷洒到对应位置的农作物上。 进一步,识别摄像头左、右两侧的X杆上均螺栓连接有舵机,舵机的输出轴朝向药 箱设置,舵机的输出轴连接有L型的摆臂,喷头螺栓连接在摆臂上,舵机外侧设有安装架,安 装架顶端连接有距离传感器。作为优选这样舵机通过对摆臂的控制实现对喷头的精准控 制,喷头与药液泵之间采用软管连接,舵机控制摆臂的动作精准调节喷头的位置,并采用双 舵机的结构从两侧分别对农作物进行精准喷洒农药,提高了喷药精度和喷药效率。并且舵 机能够提供稳定正确的重力方向值,机器人的重心方向总是与舵机提供的方向做比较,得 出的偏差信号作为反馈信号形成闭环控制,使机器人保持平衡。 进一步,药箱的侧壁上嵌设有透明的观察条,观察条外侧的药箱侧壁上设有刻度 尺。作为优选这样可将观察条中的液面与刻度尺对比观察药箱内的农药量,便于及时补充 农药。 进一步,上车架的外缘设有向下倾斜的护板。作为优选这样可通过护板对下车架 上的控制机构进行雨水遮挡、阳光遮挡和杂物遮挡,有利于降低外界环境对控制机构的不 良影响,保障控制机构能正常运行。 进一步,控制机构包括树莓派开发板与Arduino单片机。作为优选通过Arduino单 片机可对距离传感器进行控制达到避障效果,并对灰度传感器反馈的信息进行分析后调配 车轮达到小车调整。基于树莓派的OpenCV视觉图像处理对识别摄像头采集的图案进行植物 颜色、识别定位追踪,植物与植物之间间距过小,为达到不误喷不乱喷,在通过对杂草识别 时,场地中具有较多相近绿色,形成的误差十分之大。因此识别摄像头OpenCV对目标植物识 别颜色分析十分精密,可不同程度对杂草等目标进行喷洒农药,从而完成一系列的服务机 4 CN 111587872 A 说 明 书 3/5 页 器人任务。 本发明的优点在于: 1、摄像头捕捉到的画面通OpenCV颜色处理,实现对杂草多少与植物虫害程度的判 断来计算出喷药的多少,避免了过度喷药对环境造成的污染。 2、树莓派开发板与Arduino单片机相互协调控制机器人,使机器人各大模块分工 明确,实现了喷洒精准度的提升。 3、通过三维滑台转动并加上双舵机控制双喷头同时喷药提高了喷药精度和喷药 效率。 附图说明 图1为本发明实施例的正视图; 图2为图1的左视图; 图3为本发明实施例的轴测图; 图4为本发明实施例中下车架的底部结构示意图; 图5为本发明实施例中下车架的轴测图; 图6为本发明实施例中三维滑台的侧视图; 图7为本发明实施例中三维滑台的俯视图; 图8为本发明实施例中三维滑台的轴测图。











