
技术摘要:
电梯的导轨加工装置具有加工装置主体和悬吊部件。悬吊部件从上部连接体将加工装置主体悬吊在井道内,该上部连接体使加工装置主体沿着导轨移动。在将加工装置主体安装于导轨,并且使第一末端面辊和第二末端面辊与导轨的末端面接触的状态下,悬吊部件向加工装置主体的安 全部
背景技术:
在以往的电梯中,使用设置于车间的专用的加工设备,高效且高精度地加工制造 多根导轨(例如参照专利文献1)。 此外,在以往的电梯导轨的磨削装置中,在轿厢上部设置有框体。在框体设置有磨 削导轨的研磨机。此外,在框体的研磨机的上下分别设置有多个辊(例如参照专利文献2)。 而且,在以往的导轨清洁装置中,与导轨接触的多个板状的清洁体安装于清洁体 安装部件。在清洁体安装部件的上下分别设置有多个驱动辊。这些驱动辊分别经由减速机 构与马达连接(例如参照专利文献3)。 现有技术文献 专利文献 专利文献1:日本特开2003-285216号公报 专利文献2:日本特开平9-323873号公报 专利文献3:日本实开平2-15978号公报
技术实现要素:
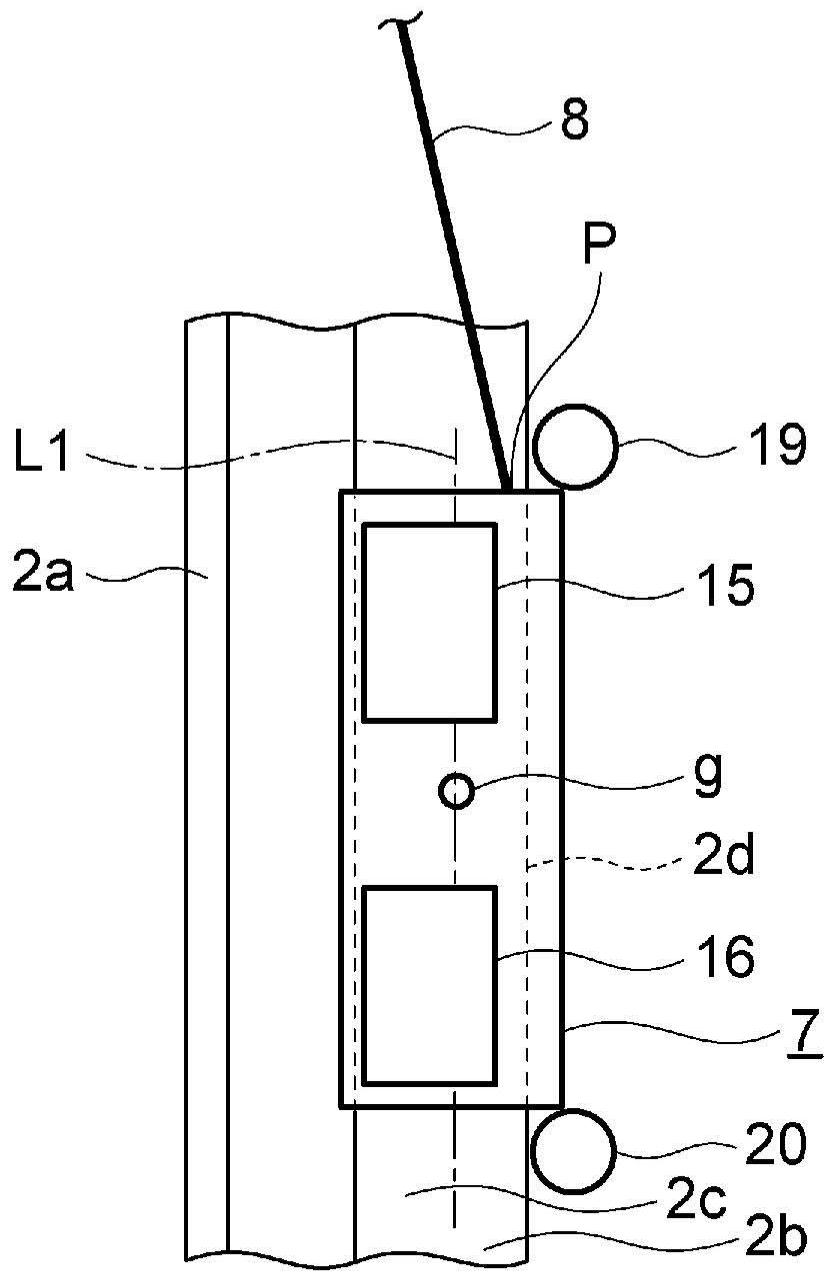
发明要解决的课题 在以往的电梯的更新施工中,存在将原有的轿厢更换为新设的轿厢的情况。在该 情况下,搭载于原有的轿厢的原有的紧急停止装置也被更换为新设的紧急停止装置。此外, 原有的导轨的引导面因与搭载于原有的轿厢的引导装置之间的长期接触而磨损,存在相对 于紧急停止装置的摩擦系数减小的情况。因此,在将原有的轿厢更换为新设的轿厢的情况 下,原有的导轨也被更换为新设的导轨。 但是,在该情况下,原有的导轨的拆除、新设的导轨的设置、以及新设的导轨的定 位等要花许多工夫,工期变长。此外,成本也提高。 相对于此,专利文献1所示的以往的导轨的加工设备只是用于制造新导轨的装置, 其设置于车间。因此若欲对原有的导轨实施加工,则必须从井道拆下导轨,搬运到车间实施 加工,进而搬入井道,再次安装。因此,结果工期变长。 此外,在专利文献2的磨削装置中,研磨机借助框体固定于轿厢。因此,能够进行去 除导轨接缝的阶差的加工等局部加工。但是,若欲一边使轿厢行驶一边遍及整个导轨连续 地实施加工,则会受到轿厢振动的影响,不能均匀地加工。 另外,专利文献3的清洁装置仅仅利用清洁体来清洁导轨的表面,无法对导轨的制 动面实施加工。 本发明是为了解决上述那样的课题而完成的,其目的在于,得到一种电梯的导轨 加工装置,其能够在导轨设置于井道的情况下对导轨的制动面实施连续且稳定的加工。 3 CN 111601766 A 说 明 书 2/12 页 用于解决课题的手段 本发明的电梯的导轨加工装置对导轨实施加工,导轨具有:托架固定部,其固定于 导轨托架;和引导部,其引导升降体升降,电梯的导轨加工装置具备:加工装置主体;以及悬 吊部件,其从上部连接体将加工装置主体悬吊在井道内,上部连接体使加工装置主体沿着 导轨移动,引导部具有:制动面,其是当升降体紧急停止时紧急停止装置所接触的面;以及 末端面,其是与托架固定部相反的一侧的端面,悬吊部件是具有挠性的部件,加工装置主体 具有:加工工具,其对制动面实施加工;以及第一末端面辊和第二末端面辊,其在上下方向 上彼此隔开间隔地配置,在将加工装置主体安装于导轨,并且使第一末端面辊和第二末端 面辊与末端面接触的状态下,悬吊部件向加工装置主体的安装位置位于通过加工装置主体 的重心的铅垂线上,或者位于比铅垂线靠末端面侧的位置。 发明效果 关于本发明的电梯的导轨加工装置,在将加工装置主体安装于导轨,并且使第一 末端面辊和第二末端面辊与末端面接触的状态下,悬吊部件向加工装置主体的安装位置位 于通过加工装置主体的重心的铅垂线上,或者位于比铅垂线靠末端面侧的位置。由此,能够 在导轨设置于井道的情况下对导轨的制动面实施连续且稳定的加工。 附图说明 图1是示出本发明的实施方式1的电梯的更新施工中的状态的结构图。 图2是沿着图1的II-II线的轿厢导轨的剖视图。 图3是示出图1的加工装置主体的详细结构的立体图。 图4是从与图3不同的角度观察图3的加工装置主体的立体图。 图5是从与图3及图4不同的角度观察图3的加工装置主体的立体图。 图6是从与图3~5不同的角度观察图3的加工装置主体的立体图。 图7是示出将图3的加工装置主体设置于轿厢导轨的状态的立体图。 图8是示出将图4的加工装置主体设置于轿厢导轨的状态的立体图。 图9是示出将图5的加工装置主体设置于轿厢导轨的状态的立体图。 图10是示出图7的加工工具与轿厢导轨的接触状态的剖视图。 图11是示出实施方式1的导轨加工方法的流程图。 图12是示意性地示出图11的步骤S5的状态的结构图。 图13是示意性地示出图11的步骤S6的状态的结构图。 图14是示意性地示出图11的步骤S8的状态的结构图。 图15是示意性地示出将加工装置主体安装于轿厢导轨的状态的侧视图。 图16是示出加工装置主体的安装状态与加工稳定性的关系的表。 图17是示意性地示出图16的实施例1的悬吊条件的侧视图。 图18是示出从图17的安装状态开始制动面的加工的状态的侧视图。 图19是示出从图17的安装状态取下轿厢导轨后的状态的侧视图。 图20是示意性地示出图16的实施例2的悬吊条件的侧视图。 图21是示出从图20的安装状态开始制动面的加工的状态的侧视图。 图22是示出从图20的安装状态取下轿厢导轨后的状态的侧视图。 4 CN 111601766 A 说 明 书 3/12 页 图23是示意性地示出图16的实施例3的悬吊条件的侧视图。 图24是示出从图23的安装状态开始制动面的加工的状态的侧视图。 图25是示出从图23的安装状态取下轿厢导轨后的状态的侧视图。 图26是示意性地示出图16的实施例4的悬吊条件的侧视图。 图27是示出从图26的安装状态开始制动面的加工的状态的侧视图。 图28是示出从图26的安装状态取下轿厢导轨后的状态的侧视图。 图29是示意性地示出图16的实施例5的悬吊条件的侧视图。 图30是示出从图29的安装状态开始制动面的加工的状态的侧视图。 图31是示出从图29的安装状态取下轿厢导轨后的状态的侧视图。 图32是示意性地示出图16的比较例1的悬吊条件的侧视图。 图33是示出从图32的安装状态开始制动面的加工的状态的侧视图。 图34是示出从图32的安装状态取下轿厢导轨后的状态的侧视图。 图35是示意性地示出图16的比较例2的悬吊条件的侧视图。 图36是示出从图35的安装状态开始制动面的加工的状态的侧视图。 图37是示出从图35的安装状态取下轿厢导轨后的状态的侧视图。 图38是示意性地示出图16的比较例3的悬吊条件的侧视图。 图39是示出从图38的安装状态开始制动面的加工的状态的侧视图。 图40是示出从图38的安装状态取下轿厢导轨后的状态的侧视图。 图41是示意性地示出图16的比较例4的悬吊条件的侧视图。 图42是示出从图41的安装状态开始制动面的加工的状态的侧视图。 图43是示出从图41的安装状态取下轿厢导轨后的状态的侧视图。











