
技术摘要:
本发明提供一种能够以超微速行驶的航空器地面支援车辆。该航空器地面支援车辆包括:主驱动部件,其具有发动机(18)和变矩器(19),该发动机产生用于行驶的驱动力,该变矩器与发动机(18)的输出轴连接;辅助驱动部件(261),其产生用于以由主驱动部件实现的爬行行驶速度以下 全部
背景技术:
上述航空器地面支援车辆使用发动机作为行驶用的驱动源,具备与发动机的输出 轴连接的变矩器(例如,参照专利文献1)。 在利用上述发动机的驱动力的车辆中,在相对于航空器靠近到预定距离的时刻暂 时停止,从该位置利用变矩器的爬行现象以微速行驶,从而使航空器与车辆靠近。 现有技术文献 专利文献 专利文献1:日本特开2013-133066号公报
技术实现要素:
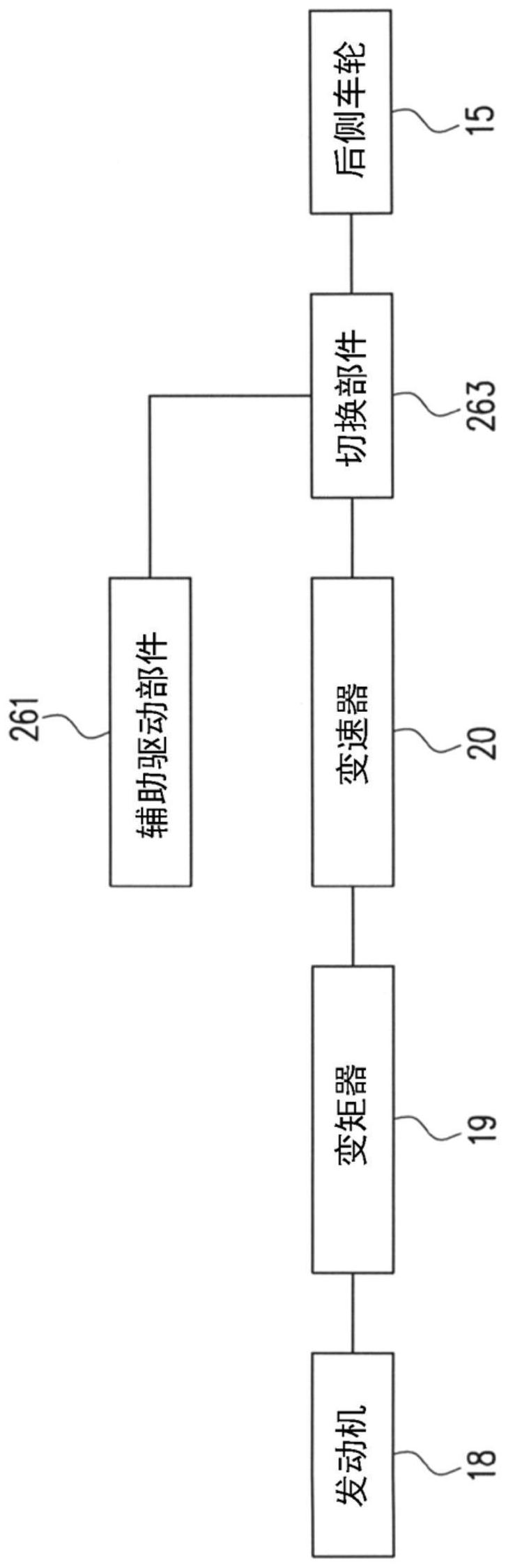
发明要解决的问题 然而,基于所述变矩器的爬行现象的行驶速度例如约为5km/h,难以以低于该速度 的超微速行驶。因此,在靠近航空器的状态下进行车辆的位置调节较为困难,即使是稍微的 操作失误也可能使航空器与车辆发生碰撞,对操纵者要求较高的技能,因此存在改善的余 地。另外,该问题是具备变矩器的航空器地面支援车辆所特有的。 因此,本发明的课题在于提供一种能够以超微速行驶的航空器地面支援车辆。 用于解决问题的方案 本发明的航空器地面支援车辆的特征在于,该航空器地面支援车辆包括:主驱动 部件,其具有发动机和变矩器,该发动机产生用于行驶的驱动力,该变矩器与该发动机的输 出轴连接;辅助驱动部件,其产生用于以由该主驱动部件实现的爬行行驶速度以下的速度 行驶的辅助驱动力;切换部件,其用于从将来自所述主驱动部件的驱动力向车轮传递的第1 状态切换为将来自所述辅助驱动部件的辅助驱动力向车轮传递的第2状态;传感器,其用于 检测车辆相对于航空器的预定距离;以及控制部,其基于该传感器的检测信号使所述切换 部件工作。 根据上述结构,基于利用传感器检测到车辆相对于航空器的预定距离时的检测信 号,控制部使切换部件工作,从而从将主驱动部件的驱动力向车轮传递的第1状态切换为将 辅助驱动部件的辅助驱动力向车轮传递的第2状态。由此,不是利用来自主驱动部件的驱动 力,而是利用辅助驱动部件的辅助驱动力使车轮旋转,从而能够使车辆以由主驱动部件实 现的爬行行驶速度以下的超微速行驶。 另外,所述航空器地面支援车辆也可以是,所述切换部件进行切换,以使所述辅助 驱动力经由从所述主驱动部件向车轮的传递线路的一部分传递。 如上所述,辅助驱动力经由从主驱动部件向车轮的传递线路的一部分传递,从而 与辅助驱动力从其他传递线路向车轮传递的结构相比,谋求结构的简化。 3 CN 111591292 A 说 明 书 2/7 页 另外,所述航空器地面支援车辆的所述控制部也可以构成为,基于所述传感器的 检测信号,在车辆的速度为预先设定的设定速度以下且为来自所述发动机的驱动力在所述 主驱动部件内被阻断而不向车轮侧输出的空档状态的情况下,使所述切换部件工作。 如上所述,基于传感器的检测信号,在车辆的速度为预先设定的设定速度以下且 为来自发动机的驱动力在主驱动部件内被阻断而不向车轮侧输出的空档状态的情况下,控 制部对切换部件进行切换,因此在切换时不会对辅助驱动部件施加来自发动机的较大的驱 动力(负载)。由此能够防止辅助驱动部件的破损。 另外,所述航空器地面支援车辆的所述控制部也可以构成为,能够利用所述传感 器检测车辆相对于航空器的第1预定距离,所述控制部包括:速度调节部件,其用于将车辆 的速度调节为预先设定的设定速度以下;以及空档切换部件,其用于切换为所述空档状态, 所述控制部在利用所述传感器检测到车辆成为比所述第1预定距离靠近航空器的第2预定 距离的情况下,在使所述速度调节部件工作而将车辆的速度调节为设定速度以下之后,使 所述空档切换部件和所述切换部件工作。 如上所述,控制部在利用所述传感器检测到车辆成为比所述第1预定距离靠近航 空器的第2预定距离的情况下,在使速度调节部件工作而将车辆的速度调节为设定速度以 下之后,使空档切换部件和切换部件工作,因此能够使车辆可靠地以超微速行驶。 发明的效果 根据本发明,提供一种航空器地面支援车辆,通过控制部从将来自主驱动部件的 驱动力向车轮传递的第1状态切换为将来自辅助驱动部件的辅助驱动力向车轮传递的第2 状态,从而能够以超微速行驶。 附图说明 图1是本发明的航空器地面支援车辆的侧视图。 图2是该车辆的俯视图。 图3是表示用于将来自该车辆所具备的发动机的驱动力传递至车轴的动力传递装 置和微速行驶单元的俯视图。 图4是图3的侧视图。 图5是表示微速行驶单元的内部的结构的纵剖侧视图。 图6是表示该车辆所具备的区域传感器的三个检测区域的侧视图。 图7是基于来自本发明的航空器地面支援车辆所具备的传感器的检测信号进行控 制的控制框图。 图8是表示本发明的基本的结构的框图。 附图标记说明 1…车辆,2…传动轴,11…车辆主体,12…带式输送器,13…驾驶部,14…前侧车 轮,15…后侧车轮,16…控制部,17…制动器,18…发动机,19…变矩器,20…变速器(变速 机),21…差速齿轮(差动装置),22…车轴,23…传动器轴,24…驻车制动器,25…第1传动 轴,26…超微速行驶单元,27…轴承,28…旋转构件,29…第2传动轴,30…键,31…轴承, 32…止转构件,33…止挡板,34…板簧,35…车速传感器,36…传感器(激光区域传感器), 121…扶手部,122…罩部,123…前保险杠,123A…保险杠传感器,131…转向手柄,132…加 4 CN 111591292 A 说 明 书 3/7 页 速踏板,133…制动踏板,134…座位,135…警报部件,136…手动开关,137…仪表板,261… 液压马达(辅助驱动部件),262…链传动机构,263…电磁离合器(切换部件),2621…驱动侧 的链轮,2622…从动侧的链轮,2623…链条,2631…绕组,2632…转子,2632A…轴套部, 2633…电枢,E1…第1区域,E2…第2区域,E3…第3区域,P…航空器。











