
技术摘要:
本发明公开了一种雷达目标精细结构散射贡献提取方法,包含:将雷达目标的几何计算区域划分为直接区域和间接区域;根据预设的成像要求,获取扫频扫角间隔;分别对直接区域和间接区域进行网格划分,得到已标记的直接区域和已标记的间接区域;分别采用直接求解法和迭代求 全部
背景技术:
随着雷达和计算机技术的发展,对目标特性计算的精度越来越高,雷达目标细微 结构对散射特性贡献不可忽略。为了更好地控制目标散射特性,往往需要分离出这些细微 结构的贡献进而给出相应的抑制措施。但目前尚未有合适的提取方法用于分离出这些细微 结构的贡献。 由此,亟需提出一种能够适用计算包含精细结构雷达目标快速电磁仿真方法,同 时通过二维ISAR成像分析获取精细结构所在位置,提取散射贡献,用以解决上述问题。
技术实现要素:
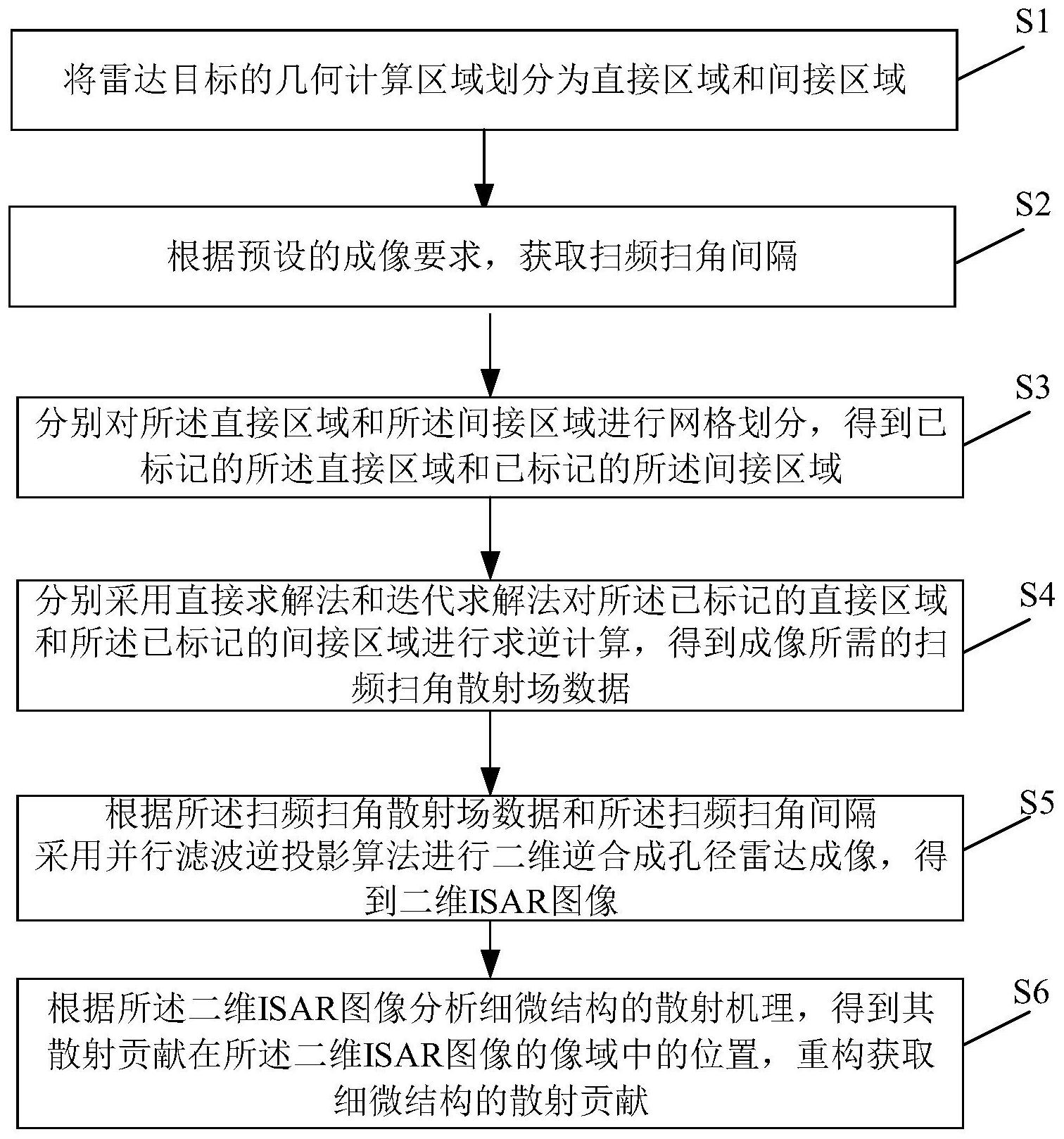
本发明的目的在于提供一种雷达目标精细结构散射贡献提取方法,提出直接求解 和迭代求解相结合的高效散射场获取方法,并采用成像分析的方式获取细微结构的散射贡 献。在保持计算精度的基础上,大幅提高了电磁散射计算的仿真效率。 为了实现以上目的,本发明通过以下技术方案实现: 一种雷达目标精细结构散射贡献提取方法,包含:步骤S1、将雷达目标的几何计算 区域划分为直接区域和间接区域;步骤S2、根据预设的成像要求,获取扫频扫角间隔;步骤 S3、分别对所述直接区域和所述间接区域进行网格划分,得到已标记的所述直接区域和已 标记的所述间接区域;步骤S4、分别采用直接求解法和迭代求解法对所述已标记的直接区 域和所述已标记的间接区域进行求逆计算,得到成像所需的扫频扫角散射场数据;步骤S5、 根据所述扫频扫角散射场数据和扫频扫角间隔采用并行滤波逆投影算法进行二维逆合成 孔径雷达成像,得到二维ISAR图像;步骤S6、根据所述二维ISAR图像分析细微结构的散射机 理,得到其散射贡献在所述二维ISAR图像的像域中的位置,重构获取细微结构的散射贡献。 优选地,所述步骤S2包括:所述预设的成像要求采用如下公式进行确定: 式中,δr表示距离向分辨率,δc表示方位向分辨率,式中,c为光速;B为带宽,λ为波 长,Δθ为角度扫描范围。 优选地,所述步骤S3包括:根据扫频最高频率,按照对应预设网格剖分尺寸划分所 述直接区域和所述间接区域,并对相应位于所述直接区域的网格做直接求解标记,以及对 相应位于所述间接区域的网格做迭代求解标记。 4 CN 111551936 A 说 明 书 2/6 页 优选地,所述预设网格剖分尺寸为 优选地,所述步骤S4还包括:采用迭代求解法对所述已标记的间接区域的阻抗矩 阵进行求逆计算,得到第一部分中间结果;采用直接求解法对所述已标记的直接区域的阻 抗矩阵进行求逆计算,得到第二部分中间结果;在整个目标电流分布过程中,将所述第一部 分中间结果和所述第二部分中间结果作为预条件,采用外部循环迭代法进行求解获取若干 个散射场,所述若干个散射场构成所述扫频扫角散射场数据。 优选地,所述阻抗矩阵在入射频率一定时为目标固有属性,采用三角网格和RWG基 离散电场积分方程时,所述已标记的间接区域的阻抗矩阵和所述已标记的直接区域的阻抗 矩阵中的阻抗矩阵元素zmn均采用如下公式进行表示: 式中,f表示RWG基函数,下标m和n分别表示所述阻抗矩阵的m行和n列, 为哈密顿 算子,r为位置矢量,k表示波数, 优选地,所述步骤S5包括:根据目标尺寸确定成像范围,结合所述步骤S2中成像分 辨率确定扫频扫角间隔,根据所述步骤S4中逐一获取扫频扫角散射场数据,进而把扫频扫 角散射场数据组织成一个二维数组;根据滤波逆投影算法,基于此二维数组散射场生成成 像范围的像素点,每个所述像素点的像素值采用NVIDIA GPU线程并行加速计算,得到所述 二维ISAR图像。 优选地,所述步骤S6包括:采用如下公式重构所述细微结构散射贡献: 式中,Es(k,θ)表示细微结构散射场,k为波数,θ为入射固定俯仰角,An为复反射系 数,(xn,yn)为散射中心位置。 本发明与现有技术相比,具有以下优点: 本发明所提供的一种雷达目标精细结构散射贡献提取方法,为了获取精细结构散 射贡献,这里采用像域分析方法。为了成像,首先要获取扫频扫角的散射场,依据成像精度 获取扫频扫角间隔,由此本发明包含:步骤S1、为快速精确获取雷达目标的散射特性,将雷 达目标几何计算区域划分为直接区域和间接区域两类属性;步骤S2、分别对所述直接区域 和所述间接区域进行网格划分,得到已标记的所述直接区域和已标记的所述间接区域;步 骤S3、分别采用直接求解法和迭代求解法对已标记的直接区域和间接区域进行计算,整体 采用迭代计算,得到成像所需的所述;步骤S4、采用并行滤波逆投影算法进行二维逆合成孔 径雷达(ISAR)成像。滤波逆投影算法能够不加近似地获取精确二维ISAR图像;步骤S5、采用 滤波逆投影算法进行二维逆合成孔径雷达(ISAR)成像;分析细微结构的散射机理,得到其 散射贡献在ISAR像域中的位置,重构获取细微结构的散射贡献。 本发明将目标计算区域分解成为直接求解和迭代求解区域,这样可以显著提高计 算效率,本质上是一种更加灵活、实用的电磁场散射区域分解算法。采用积分方程求解多尺 度电磁问题,阻抗矩阵条件数奇异,难以快速收敛,本方法能够避免上述不足。目标分为直 接求解和迭代求解区域后,采用并行计算手段(并行滤波逆投影算法)分别计算每个区域的 5 CN 111551936 A 说 明 书 3/6 页 初步结果,进一步提高了电磁计算效率。 将不同区域的迭代直接求逆结果作为预条件,进而进行外部循环迭代,这样可以 最大程度地加速计算。 即所述步骤S5根据目标尺寸确定成像范围,结合所述步骤S2中成像分辨率确定扫 频扫角间隔,根据所述步骤S4中逐一获取扫频扫角散射场数据,进而把扫频扫角散射场数 据组织成一个二维数组;根据滤波逆投影算法,基于此二维数组散射场生成成像范围的像 素点,每个所述像素点的像素值采用NVIDIA GPU线程并行加速计算,得到所述二维ISAR图 像。与串行代码相比,加速比10倍左右。 滤波逆投影算法在成像分析上具有精确的特点,但存在效率问题。提出并行计算 方法,能够加速成像速度,实现快速分析。 由此可知,本发明提出了一种能够适用计算包含精细结构雷达目标快速电磁仿真 方法,同时通过二维ISAR成像分析获取精细结构所在位置,提取散射贡献,实现计算出雷达 目标的细微结构对散射特性贡献,提高雷达目标特性仿真精度效率。 附图说明 图1为本发明一实施例提供的一种雷达目标精细结构散射贡献提取方法的流程 图; 图2为本发明一实施例提供的当雷达目标为民用飞机时,直接区域和间接区域的 划分示意图。











