
技术摘要:
本发明公开了一种交互式控制单元。该交互式控制单元包括交互式触摸屏显示器、被配置成能够将控制单元联接到外科集线器的接口、处理器和联接到处理器的存储器。存储器存储能够由处理器执行以进行以下操作的指令:从位于无菌场内部的交互式触摸屏显示器接收输入命令并且 全部
背景技术:
本公开涉及各种外科系统。外科手术通常在医疗设施(诸如例如医院)的外科手术 室或手术房(operating theaters or rooms)中执行。通常在患者周围创建无菌场。无菌场 可包括被恰当地穿着的擦洗的团队构件,以及该区域中的所有家具和固定件。在执行外科 手术中利用各种外科装置和系统。
技术实现要素:
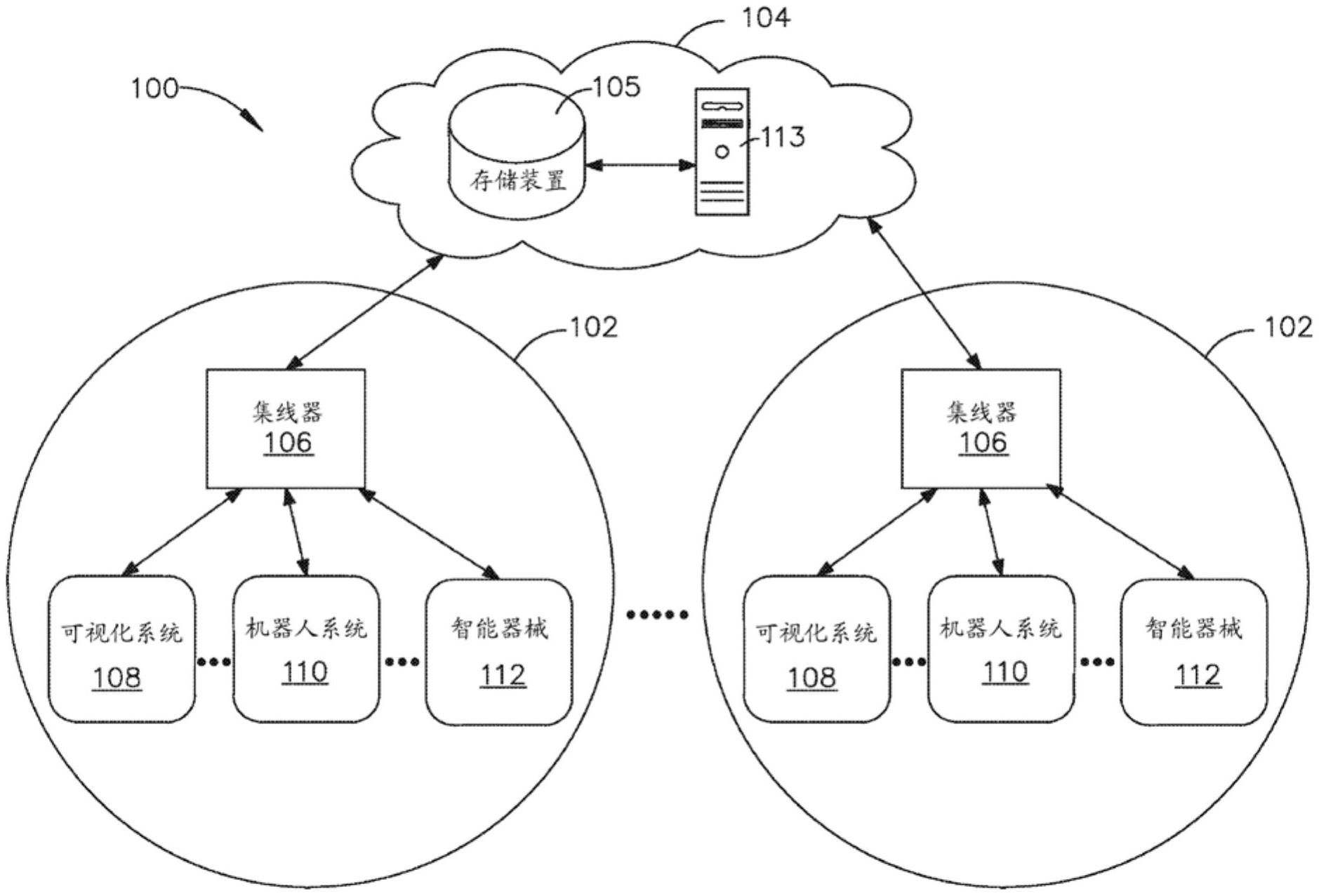
在一个大体方面中,提供了一种交互式控制单元。该交互式控制单元包括交互式 触摸屏显示器、被配置成能够将控制单元联接到外科集线器的接口、处理器和联接到处理 器的存储器。存储器存储能够由处理器执行以进行以下操作的指令:从位于无菌场内部的 交互式触摸屏显示器接收输入命令,并且将输入命令传输至外科集线器,以控制联接到外 科集线器的位于无菌场外部的装置。 在另一个大体方面中,提供了一种交互式控制单元。该交互式控制单元包括交互 式控制单元,包括交互式触摸屏显示器、被配置成能够将控制单元联接到第一外科集线器 的接口、处理器和联接到处理器的存储器。存储器存储能够由处理器执行以进行以下操作 的指令:从位于无菌场内部的所述交互式触摸屏显示器接收输入命令;将所述输入命令传 输到所述第一外科集线器以控制联接到所述第一外科集线器的位于所述无菌场外部的装 置;从第二外科集线器接收咨询请求;以及将所述交互式触摸屏显示器的一部分配置成能 够在接收到所述咨询请求之后显示从所述第二外科集线器接收的信息。 在另一个大体方面中,提供了一种交互式控制单元。该交互式控制单元包括交互 式触摸屏显示器、被配置成能够将控制单元联接到外科集线器的接口;以及控制电路,所述 控制电路用于:从位于无菌场内部的交互式触摸屏显示器接收输入命令并且将输入命令传 输至外科集线器,以控制联接到外科集线器的位于无菌场外部的装置。 4 CN 111587459 A 说 明 书 2/82 页 附图说明 各种方面的特征在所附权利要求书中进行了特别描述。然而,通过参考以下结合 如下附图所作的说明可最好地理解所述多个方面(有关手术组织和方法)及其进一步的目 的和优点。 图1为根据本公开的至少一个方面的计算机实现的交互式外科系统的框图。 图2为根据本公开的至少一个方面的用于在手术房中执行外科手术的外科系统。 图3为根据本公开的至少一个方面的与可视化系统、机器人系统和智能器械配对 的外科集线器。 图4为根据本公开的至少一个方面的外科集线器壳体和可滑动地容纳在外科集线 器壳体的抽屉中的组合发生器模块的局部透视图。 图5为根据本公开的至少一个方面的具有双极、超声和单极触点以及排烟器件的 组合发生器模块的透视图。 图6示出了根据本公开的至少一个方面的用于横向模块化外壳的多个横向对接端 口的单个电力总线附接件,该横向模块化外壳被配置成能够容纳多个模块。 图7示出了根据本公开的至少一个方面的被配置成能够容纳多个模块的竖直模块 化外壳。 图8示出了根据本公开的至少一个方面的包括模块化通信集线器的外科数据网 络,该模块化通信集线器被配置成能够将位于医疗设施的一个或多个手术室中的模块化装 置或专用于外科操作的医疗设施中的任何房间连接到云。 图9为根据本公开的至少一个方面的计算机实现的交互式外科系统。 图10示出了根据本公开的至少一个方面的包括联接到模块化控制塔的多个模块 的外科集线器。 图11示出了根据本公开的至少一个方面的通用串行总线(USB)网络集线器装置的 一个方面。 图12示出了根据本公开的至少一个方面的外科器械或工具的控制系统的逻辑图。 图13示出了根据本公开的至少一个方面的被配置成能够控制外科器械或工具的 各个方面的控制电路。 图14示出了根据本公开的至少一个方面的被配置成能够控制外科器械或工具的 各个方面的组合逻辑电路。 图15示出了根据本公开的至少一个方面的被配置成能够控制外科器械或工具的 各方面的时序逻辑电路。 图16示出了根据本公开的至少一个方面的包括多个马达的外科器械或工具,多个 马达可被激活以执行各种功能。 图17为根据本公开的至少一个方面的被配置成能够操作本文所述的外科工具的 机器人外科器械的示意图。 图18示出了根据本公开的至少一个方面的被编程以控制位移构件的远侧平移的 外科器械的框图。 图19为根据本公开的至少一个方面的被配置成能够控制各个功能的外科器械的 示意图。 5 CN 111587459 A 说 明 书 3/82 页 图20为根据本公开的至少一个方面的被配置成能够提供无电感器调谐以及其他 益处的发生器的简化框图。 图21示出了根据本公开的至少一个方面的发生器的示例,该发生器是图20的发生 器的一种形式。 图22示出了根据本公开的至少一个方面的外科器械的示意图,该外科器械使用结 合图23至图35描述的定心工具和技术的益处以线性钉横切线为中心。 图23至图25示出了根据本公开的至少一个方面,将圆形缝合器的砧座套管针对准 由双缝合技术产生的线性钉线的钉重叠部分的方法,其中: 图23示出了未与由双缝合技术产生的线性钉线的钉重叠部分对准的圆形缝合器 的砧座套管针; 图24示出了与通过双缝合技术产生的线性钉线的钉重叠部分的中心对准的圆形 缝合器的砧座套管针;并且 图25示出了显示在外科集线器显示器上的定心工具,该外科集线器显示器示出了 由双缝合技术形成的线性钉线的待由圆形缝合器切除的钉重叠部分,其中砧座套管针未与 双钉线的钉重叠部分对准,如图23所示。 图26和图27示出了根据本公开的至少一个方面的定心工具的之前图像和之后图 像,其中: 图26示出了在对准之前砧座套管针和圆形刀的投影切割路径的图像,其中目标对 准环围绕在外科集线器显示器上呈现的钉重叠部分的图像上的线性钉线的图像;并且 图27示出了在对准之后砧座套管针和圆形刀的投影切割路径的图像,其中目标对 准环围绕在外科集线器显示器上呈现的钉重叠部分的图像上的线性钉线的图像。 图28至图30示出了根据本公开的至少一个方面将圆形缝合器的砧座套管针对准 线性钉线的中心的方法,其中: 图28示出了砧座套管针与线性钉线的中心未对准; 图29示出了砧座套管针与线性钉线的中心对准;并且 图30示出了显示在线性钉线的外科集线器显示器上的定心工具,其中砧座套管针 未与双钉线的钉重叠部分对准,如图28所示。 图31为根据本公开的至少一个方面的如通过腹腔镜观察到的显示在外科集线器 显示器上的外科手术的线性钉线横切的标准标线视场的图像。 图32为根据本公开的至少一个方面,在圆形缝合器的砧座套管针和圆形刀对准线 性钉线的中心之前,图31所示的外科部位的激光辅助标线视场的图像。 图33为根据本公开的至少一个方面,在圆形缝合器的砧座套管针和圆形刀对准线 性钉线的中心之后,图32所示的外科部位的激光辅助标线视场的图像。 图34示出了根据本公开的至少一个方面的非接触传感器的非接触电感式传感器 实施方式,该非接触传感器用于确定砧座套管针相对于钉线横切中心的位置。 图35A和图35B示出了根据本公开的至少一个方面的非接触传感器的非接触电容 传感器实施方式的一个方面,该非接触传感器用于确定砧座套管针相对于钉线横切中心的 位置,其中: 图35A示出了没有附近金属目标的非接触电容传感器;并且 6 CN 111587459 A 说 明 书 4/82 页 图35B示出了金属目标附近的非接触电容传感器。 图36为根据本公开的至少一个方面的描绘用于对准外科器械的控制程序或逻辑 配置的方法的逻辑流程图。 图37示出了根据本公开的至少一个方面的包括全局显示和本地显示的外科集线 器的主显示器。 图38示出了根据本公开的至少一个方面的外科集线器的主显示器。 图39示出了根据本公开的至少一方面的在五秒时间段内的夹持稳定序列。 图40示出了根据本公开的至少一方面在手术期间的四个分开的时间处的外科部 位的四个分开的广角视图图像的示意图。 图41为根据本公开的至少一个方面的针对两种组织类型的组织蠕变夹持稳定曲 线的曲线图。 图42为根据本公开的至少一个方面的夹持力稳定曲线的时间相关成比例填充的 曲线图。 图43为根据本公开的至少一个方面的组织蠕变在夹持力稳定曲线中的作用的曲 线图。 图44A和图44B示出了根据本公开的至少一个方面的用于确定被夹持的组织何时 达到蠕变稳定性的两个曲线图,其中: 图44A示出了曲线,该曲线表示作为时间函数的矢量切线角dθ;并且 图44B示出了曲线,该曲线表示作为时间函数的闭合力的变化(ΔFTC)。 图45示出了根据本公开的至少一方面的用识别显示元素的数据增强的术前视频 图像的增强视频图像的示例。 图46为根据本公开的至少一个方面的描绘用于显示图像的控制程序或逻辑配置 的方法的逻辑流程图。 图47示出了根据本公开的至少一个方面的通信系统,该通信系统包括被定位在成 像模块和外科集线器显示器之间的通信路径中的中间信号组合器。 图48示出了根据本公开的一个方面的由外科医生佩戴的独立交互式头戴式耳机, 以将数据传送到外科集线器。 图49示出了根据本公开的至少一个方面的根据本公开的至少一个方面的用于控 制装置的使用的方法。 图50示出了根据本公开的至少一个方面的外科系统,该外科系统包括具有控制器 和马达的柄部、可释放地联接到柄部的适配器以及可释放地联接到适配器的加载单元。 图51示出了根据本公开的至少一个方面的言语的用于最佳定位的自动内窥镜系 统(AESOP)相机定位系统。 图52示出了根据本公开的至少一个方面的用于虚拟手术房集成的多功能外科控 制系统和切换接口。 图53示出了根据本公开的至少一个方面的用作手术室中的装置控制机构的光束 源和组合光束检测器系统的示意图。 图54A至图54E示出了根据本公开的至少一个方面的各种类型的无菌场控制和数 据输入控制台,其中: 7 CN 111587459 A 说 明 书 5/82 页 图54A示出了单区域无菌场控制和数据输入控制台; 图54B示出了多区域无菌场控制和数据输入控制台; 图54C示出了系留的无菌场控制和数据输入控制台; 图54D示出了电池操作的无菌场控制和数据输入控制台;并且 图54E示出了电池操作的无菌场控制和数据输入控制台。 图55A至图55B示出了根据本公开的至少一个方面的在外科手术期间在无菌场中 使用的无菌场控制台,其中: 图55A示出了位于无菌场中靠近两个从事手术的外科医生的无菌场控制台;并且 图55B示出了外科医生中的一位轻击无菌场控制台的触摸屏。 图56示出了根据本公开的至少一个方面的用于接受来自另一手术房的咨询馈送 的方法。 图57示出了根据本公开的至少一个方面的用于估计脉管路径和深度以及装置轨 迹的标准技术。 图58A至图58D示出了根据本公开的至少一个方面的用于解剖的虚拟解剖细节的 图像的多个实时视图,其中: 图58A是虚拟解剖细节的透视图; 图58C是虚拟解剖细节的侧视图; 图58B是虚拟解剖细节的透视图;并且 图58D是虚拟解剖细节的侧视图。 图59A至图59B示出了根据本公开的至少一个方面的可以在无菌场内使用的触摸 屏显示器,其中: 图59A示出了以纵向模式显示在触摸屏显示器上的外科部位的图像; 图59B示出了以横向模式旋转的触摸屏显示器,并且外科医生使用他的食指沿箭 头方向滚动图像; 图59C示出了外科医生使用他的食指和拇指沿箭头方向捏放图像以放大; 图59D示出了外科医生使用他的食指和拇指沿箭头方向捏合图像以缩小;并且 图59E示出了沿箭头指示的两个方向旋转的触摸屏显示器,以使外科医生能够以 不同的取向查看图像。 图60示出了根据本公开的至少一个方面的采用智能牵开器的外科部位,该智能牵 开器包括到外科集线器的直接接口控制。 图61示出了根据本公开的至少一个方面的具有附接到患者身体上的智能柔性贴 片显示器的外科部位。 图62是根据本公开的至少一个方面的描绘从无菌场内部与位于无菌场外部的装 置通信的控制程序或逻辑配置的方法的逻辑流程图。 图63示出了根据本公开的至少一个方面的用于执行手术的系统。 图64示出了根据本公开的至少一个方面的覆盖第一信息层的第二信息层。 图65描绘了根据本公开的至少一个方面的在外科手术期间使用包括柄部组件外 壳和无线电路板的外科器械的外科医生的透视图,其中外科医生佩戴一副安全眼镜。 图66为根据本公开的至少一个方面的用于控制外科器械的反馈控制系统的示意 8 CN 111587459 A 说 明 书 6/82 页 图。 图67示出了根据本公开的至少一个方面的反馈控制器,该反馈控制器包括屏幕显 示模块和平视显示器(HUD)模块。 图68为根据本公开的至少一个方面的描绘外科集线器的态势感知的时间线。











