
技术摘要:
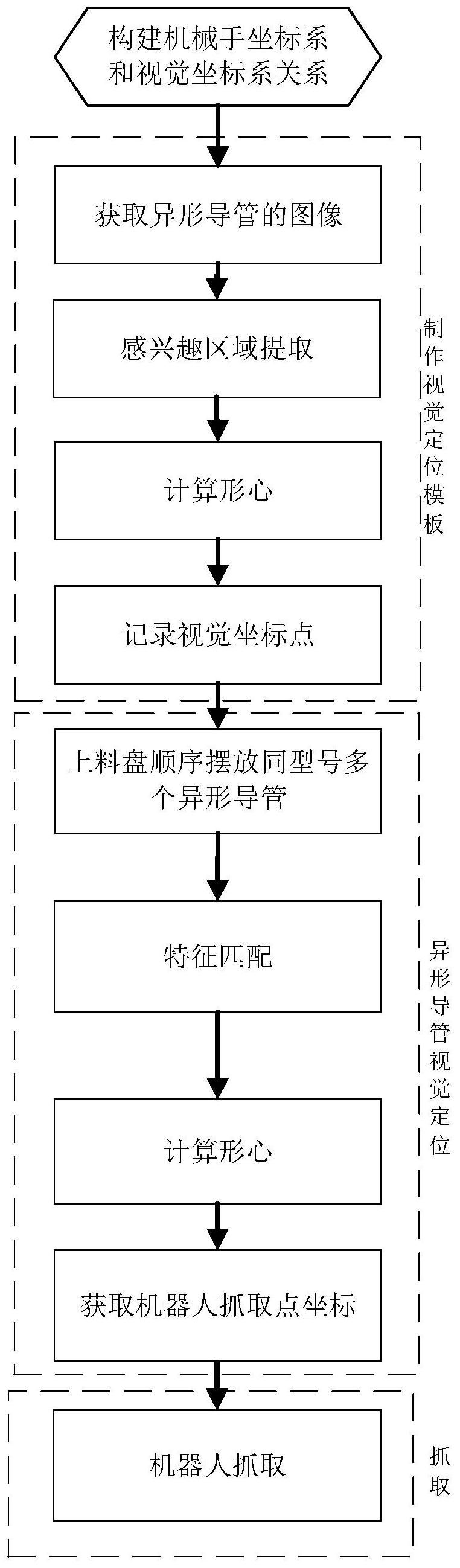
本发明提供一种异形导管机器人自动抓取的视觉定位方法,解决异形导管定位不准确、容易出现错放的问题。该方法包括:步骤一、构建机械手坐标系和视觉坐标系关系;步骤二、制作视觉定位模板;2.1)对单个异形导管拍照;2.2)提取包含该异形导管特征的区域作为感兴趣区域;2 全部
背景技术:
目前,自动化技术已大量应用于工业生产过程中,智能化生产已成为工业现场作 业的重要趋势。异形导管具有多品种、小批量等特点,在进行异形导管无损检测时,首先需 将异形导管摆放在固定位置,然后进行无损检测。目前一般通过人工操作将异形导管放置 在固定位置,此过程中,人工操作效率低,并且对于结构复杂的异形导管容易导致其定位不 准确,出现错放现象,从而对后续检测产生影响,使得后续检测的结果不准确。
技术实现要素:
为解决











