
技术摘要:
本发明公开了一种虚拟环境中基于仿真学习的无人车智能训练方法,本发明对无人车辆运动行为进行仿真,得到仿真数据集,仿真数据集包括当前环境中的环境信息和无人车辆驾驶动作,然后将环境信息进行压缩编码预处理,利用交叉分组的方法将数据集合分组,利用最小二乘法拟 全部
背景技术:
无人驾驶符合汽车智能化和互联网化的趋势,是互联网浪潮下汽车行业变革的重 大机遇《,中国制造2025》明确提出加快汽车等行业的智能化改造。2020年将成为无人驾驶 汽车商业化元年,并从此进入爆发增长期。 具体而言,无人车辆驾驶研究的目标是为了完全取代或者部分取代驾驶员的功 能。在日常生活中,车辆的驾驶控制不仅枯燥而且存在着危险,驾驶员需要时刻都关注着环 境的变化,同时还需要克服自身疲劳、大意等身体局限,无人驾驶技术可以在一定程度上让 驾驶员从枯燥繁琐的驾驶行为中解脱出来。实现无人车智能驾驶这种新的控制方式,对于 增强人们生活的幸福感有极其重要的意义。 目前无人车的智能驾驶仍存在很多问题。 2018年3月,Uber无人驾驶汽车在亚利桑那州Tempe市发生交通事故。事故是因为 行人在非人行横道突发闯红灯过马路导致的,Uber无人汽车没能应对这种突发的复杂情 况。 同年5月,特斯拉无人驾驶造成了全世界第一宗自动驾驶系统致人死亡的车祸, Model S电动汽车在途径十字路口的时候,撞上了一辆正在左转的卡车。因为强烈的阳光照 到白色货车反光,导致无人车没有识别到车辆。 谷歌的Waymo也是目前比较先进的无人汽车,但在2016年也发生过事故,谷歌 Lexus无人车撞上了一辆公交,说明其在面对复杂的交通状况时会出现很严重的判断失误。 由此可见,无人车智能驾驶对于复杂天气以及突发复杂情况下决策不准确。问题 在于现有智能驾驶采集真实数据进行学习决策。然而,对上述特殊场景数据很难采集到。尽 管可以通过真实环境演习来采集数据,但是这种数据采集的成本较高,需要耗费大量的人 力、物力和财力。 近年来,随着虚拟现实技术的发展,利用虚拟仿真技术搭建虚拟环境下的无人车 智能驾驶训练平台,仿真出大量全面的数据对无人车进行训练成为科研人员广泛采用的一 种方法。目前虚拟环境中的无人车的智能决策的训练主要利用强化学习完成决策任务,通 过无人车辆和环境的交互不断学习完成无人车智能决策的训练。然而,现有的训练一般都 是让无人车辆在环境中从0开始训练,无人车辆学习的速度比较慢且效率比较低。
技术实现要素:
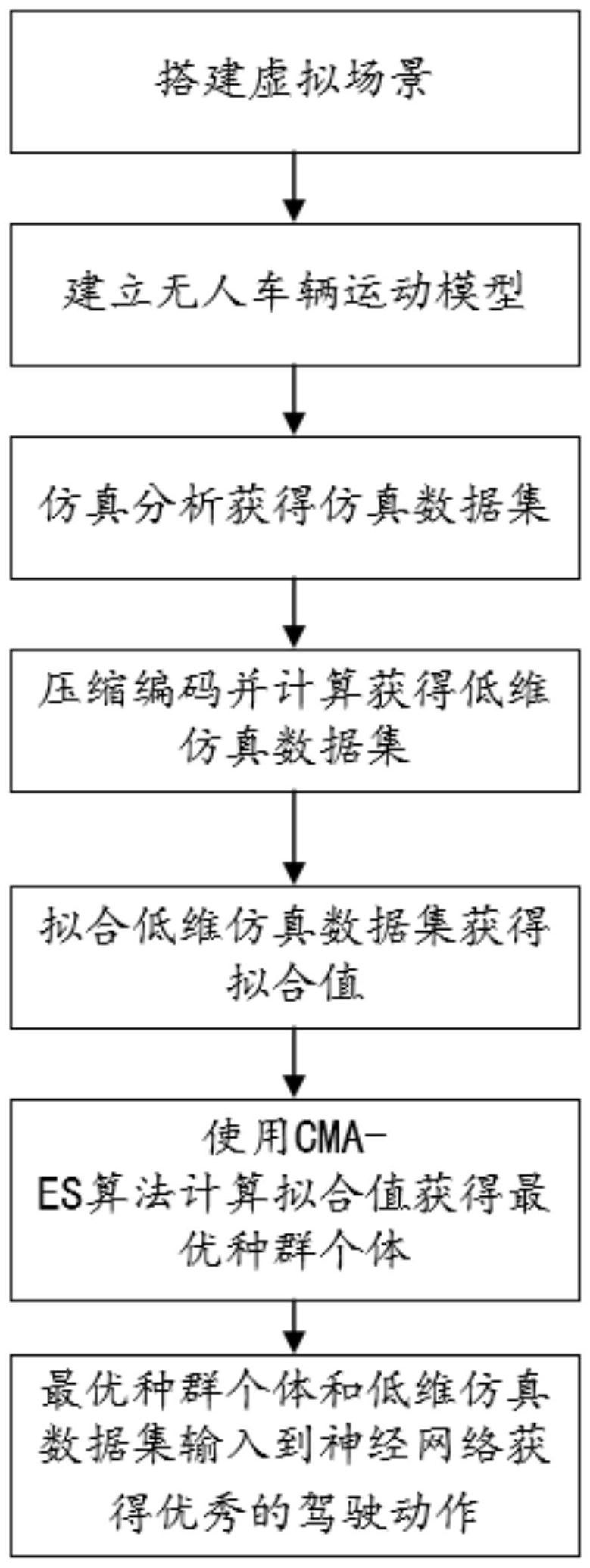
本发明主要解决的技术问题是提供一种虚拟环境中基于仿真学习的无人车智能 训练方法,解决无人车辆学习的速度比较慢且效率比较低的问题。 为解决上述技术问题,本发明采用一种虚拟环境中基于仿真学习的无人车智能训 3 CN 111581887 A 说 明 书 2/6 页 练方法,其特征在于,包括以下步骤: 步骤1.搭建虚拟场景; 步骤2.建立无人车辆运动模型; 步骤3.根据步骤2中的无人车辆运动模型在步骤1搭建的虚拟场景中进行仿真,获 得无人车辆的动作信息作为仿真数据集; 步骤4.对仿真数据集进行压缩编码和计算获得低维仿真数据集; 步骤5.对低维仿真数据集进行拟合获得拟合值; 步骤6.将拟合值输入到CMA-ES算法中进行强化学习训练,获得最优种群个体; 步骤7.将最优种群个体和低维仿真数据集输入到神经网络中,得出驾驶行为。 优选的,所述步骤1中的虚拟场景包括有自然环境、道路环境、车辆模型和路网语 义。 优选的,所述步骤3中的动作信息包括有加速、匀速、减速、左转、右转和停止。 优选的,所述的仿真数据集包括有环境信息和无人车辆驾驶动作。 优选的,采用变分自编码器对环境信息进行压缩编码,获得压缩信息,采用MDN- RNN模型计算压缩信息,得出环境信息上下文关系,由压缩信息和环境信息上下文关系共同 构成低维仿真数据集。 优选的,使用最小二乘法对低维仿真数据集进行拟合获得拟合值。 优选的,将所述拟合值替换原始CMA-ES算法中的初始种群,通过CMA-ES算法获得 最优种群个体。 优选的,将最优种群个体和低维仿真数据集输入到神经网络,神经网络生成驾驶 行为反馈给CMA-ES算法,CMA-ES算法更新参数生成新的最优种群个体到神经网络中,直到 神经网络得出驾驶优秀的驾驶行为。 优选的,所述的CMA-ES算法更新参数包括有均值的更新、协方差矩阵的更新和步 长的更新。 优选的,所述的神经网络的输入层为200维-400维、隐藏层为200维-400维、输出层 为2维-5维。 本发明对无人车辆运动行为进行仿真,得到仿真数据集,仿真数据集包括当前环 境中的环境信息和无人车辆驾驶动作,然后将环境信息进行压缩编码预处理,利用交叉分 组的方法将数据集合分组,利用最小二乘法拟合求出拟合值,最后使用CMA-ES算法在拟合 值的基础上进行进化求优,能够缩短无人车辆学习任务的过程,提高了学习效率,将得到的 最优种群个体加入神经网络中,神经网络输入到无人车辆的智能训练过程中,指导无人车 辆学习良好的驾驶行为。 附图说明 图1是本发明虚拟环境中基于仿真学习的无人车智能训练方法的整体流程图; 图2是本发明虚拟环境中基于仿真学习的无人车智能训练方法的强化学习训练的 流程图; 图3是本发明虚拟环境中基于仿真学习的无人车智能训练方法中CMA-ES算法求优 流程图。 4 CN 111581887 A 说 明 书 3/6 页











