
技术摘要:
本发明海参捕捞装置,涉及自动化水产捕捞技术领域,尤其涉及自动化海参捕捞装置。本发明包括:抓取传送机构、海参收集装置、机械臂和遥控无人潜水器;遥控无人潜水器用于安装机械臂和海参收集装置,其具有水下推进装置能够携带其上的设备在水下进行三维立体机动;海参 全部
背景技术:
近年来,随着人民生活水平的提升,海参产品需求量不断增加,海参产业已成为中 国海洋渔业经济的重要组成部分。然而,目前主要的海参捕捞手段还是人工捕捞,作业风险 大,捕捞效率低。而现有的海参捕捞装置主要有两类:机械臂式和抽取式。 机械臂式捕捞装置,以发明名称为海参捕捞机器人,专利申请号20181141552所公 开的一种海参捕捞装置为例,其主要工作方式伸出机械臂,通过安装在机械臂前端的机械 手抓取海参,之后再缩回机械臂将海参放入装置自带的收集容器中。由于海水阻力等因素 的影响,其工作时伸缩机械臂的往复运动往往耗费大量的时间,使得捕捞效率低下。 抽取式捕捞装置,以发明名称为一种自动捕捞海参的机器人,专利申请号 201910464977。1所公开的一种海参捕捞装置为例,其主要工作方式为通过安置在装置上的 抽水泵抽取海水,迫使海水流动,从而带动附着在海床上的海参进入装置内部。然而这种工 作会搅动海底泥砂,使得水下能见度大大降低,干扰装置本身作业,也破坏了海底生态环 境。因此现有的海参捕捞装置均不能满足使用需求。 针对上述现有技术中所存在的问题,研究设计一种新型的海参捕捞装置,从而克 服现有技术中所存在的问题是十分必要的。
技术实现要素:
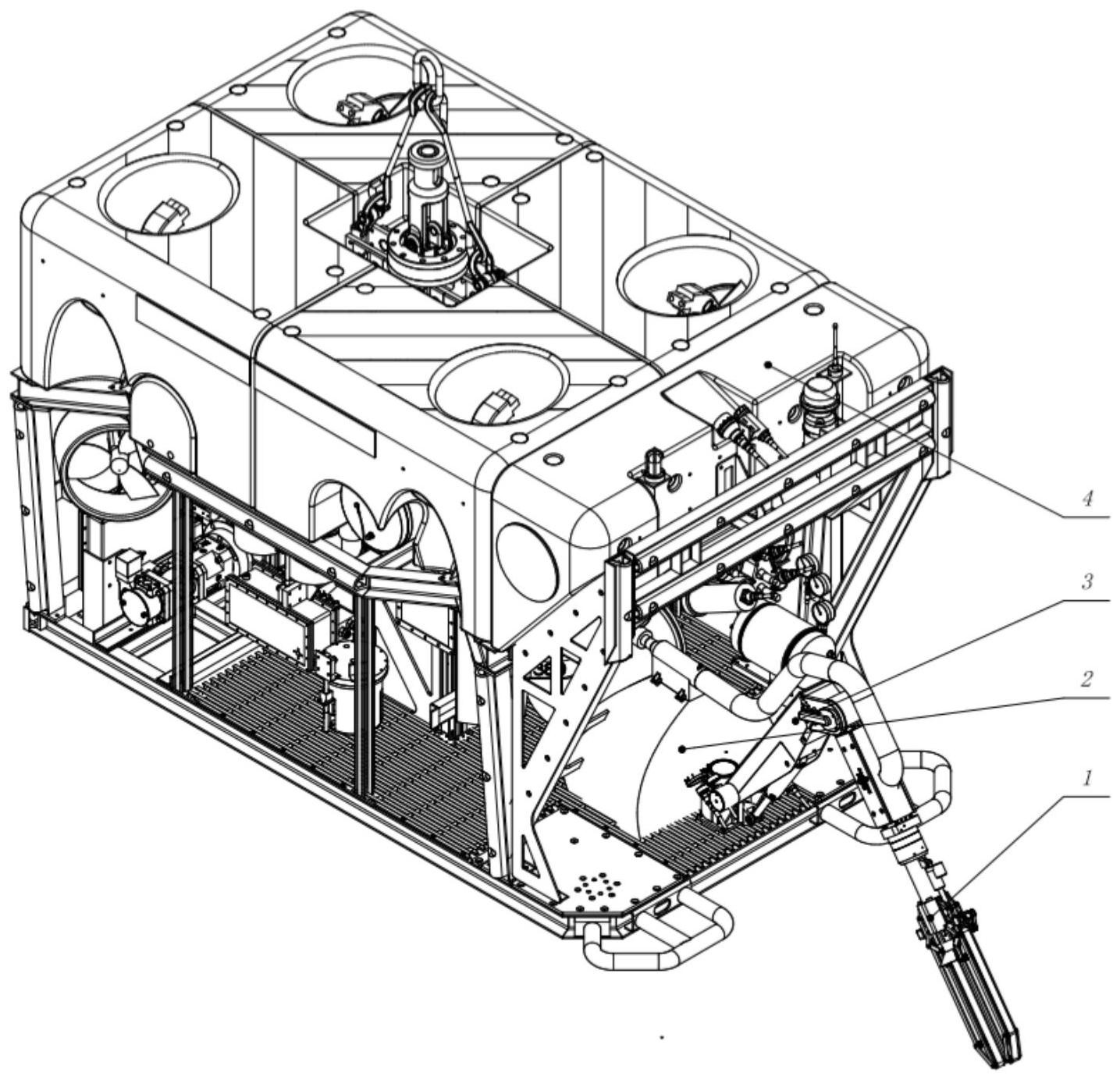
根据上述现有技术提出的现有海参捕捞装置工作效率低;搅动泥砂、干扰作业同 时破坏海底生态环境等技术问题,而提供一种海参捕捞装置。本发明主要采用将抓取与传 送结合,先使海参脱离海床一定高度再抽取的设计,从而减少机械臂完成抓取动作所需的 运动距离,实现高效捕捞海参;同时该设计减少了对海床附近水流的扰动,从而几乎不会搅 动海底泥砂,避免了抽取式海参捕捞装置水下能见度不足的问题。 本发明采用的技术手段如下: 一种海参捕捞装置包括:抓取传送机构、海参收集装置、机械臂和遥控无人潜水 器; 进一步地,遥控无人潜水器用于安装机械臂和海参收集装置,其具有水下推进装 置能够携带其上的设备在水下进行三维立体机动; 进一步地,海参收集装置装于遥控无人潜水器的内部; 进一步地,机械臂装于遥控无人潜水器的前部; 进一步地,抓取传送机构装于机械臂的前端。 进一步地,海参收集装置包括:收集仓、水泵、双向排水口、网兜和软管; 进一步地,网兜固定装于遥控无人潜水器的内部; 4 CN 111587850 A 说 明 书 2/6 页 进一步地,收集仓装于网兜的顶部,并与网兜相通,收集舱收集的海参落入网兜 内; 进一步地,软管的一端连接于收集仓前端开口处,另一端穿过机械臂与抓取传送 机构相连接; 进一步地,水泵装于收集仓后端的开口处,用于为抽取海水提供动力,在水泵的尾 部装有双向排水口,进行排水。 进一步地,收集仓包括:仓体、传感器、扭簧、收集仓单向门、过滤网; 进一步地,仓体装于网兜的顶部,内部空间可容纳一至三头海参;仓体的底部与网 兜相通; 进一步地,仓体的前端入口部与软管相连接,后端口部装有水泵; 进一步地,传感器安装在仓体的入口处,用于检测是否有海参入仓及对海参进行 计数; 进一步地,收集仓单向门铰接于仓体底部与与网兜的通道处,只能向下打开,且在 铰接处安装有扭簧;实现在抽取海参、仓体内部有负压时闭合,在抽取结束、负压消失时在 扭簧的作用下打开,此时海参落入网兜内,实现海参与海水的自动分离; 进一步地,过滤网装于仓体后端口处,水泵入口的前端,可通过海水并阻挡海参。 进一步地,机械臂包括:抓取传送机构安装座、小臂、大臂、机械臂推杆电机、肩部 和底座; 进一步地,底座固定装于遥控无人潜水器上,位于网兜的前面; 进一步地,肩部可动连接于底座上,并有电机独立驱动,使肩部能相对底座独立回 转; 进一步地,大臂后端可动连接于肩部上,并与机械臂推杆电机相连接;机械臂推杆 电机连接于大臂与肩部之间,用于推动大臂相对肩部运动; 进一步地,小臂的后端可动连接于大臂前端,并有电机独立驱动,使小臂能够相对 大臂回转; 进一步地,抓取传送机构安装座(可动连接于小臂的前端,并有电机独立驱动,用 于固定抓取传送机构,使抓取传送机构能相对小臂回转。 进一步地,抓取传送机构包括:机构基座、导轨、滑套、推杆电机及抓取传送爪; 进一步地,机构基座装于抓取传送机构安装座的前端;机构基座内部设计有大直 径通孔,通孔前部向外扩张呈喇叭口状,用于收集及通过海水及海参; 进一步地,滑套通过导轨装于机构基座的外部,并在导轨的导向下,在机构基座上 前后移动; 进一步地,推杆电机固定装于机构基座的后部,其推杆与滑套相连接,推动滑套沿 导轨直线运动; 进一步地,滑套的上下各设置有一个抓取传送爪,两个抓取传送爪可抓取海参并 将抓取到的海参由喇叭口送入到机构基座中。 进一步地,抓取传送爪为两个对称装于机构基座的上、下部,每个抓取传送爪均包 括:4根滑套连杆、两根连架杆、两根指端连杆、两根内侧连杆、两根外侧连杆、多个同步带 轮、一条同步带、一条传动带、一个同步带电机; 5 CN 111587850 A 说 明 书 3/6 页 进一步地,4根滑套连杆分别对称铰装于滑套两侧上部或下部的前后各一根,且前 后的滑套连杆互相平行; 进一步地,两根连架杆的后端与两根外侧连杆的中部及每侧前部的两根滑套连杆 通过铰轴铰接;两杆连杆架的后端通过铰轴与每侧后部的两根滑套连杆铰接;两根连架杆 的中部与滑套铰接,起到支撑作用;两根连架杆的前端通过铰轴铰接于内侧连杆的后端,内 侧连杆的前端通过铰轴铰接于指端连杆的一端,指端连杆的另一端与两根连杆架的前端通 过铰轴铰接; 进一步地,内侧连杆两端及外侧连杆前端及中部的四个铰轴上装上同步带轮,并 装上同步带;同步带的外侧带有花纹或不规则凸起,用于带动装置抓取到海参向后运动之 机构基座喇叭口处; 进一步地,外侧连杆中部的铰轴外部装有传动带轮,通过传动带与装于外侧连杆 后部的同步带电机的输出端相连接。 进一步地,软管一端连接于仓体前端开口,另一端穿过小臂内部,连接于抓取传送 机构安装座,并与抓取传送机构出口连通,用于将海水及海参从抓取传送机构输送至海参 收集装置中。 本发明使用过程为: 遥控无人潜水器按设定路径在海床上一定高度运动,并由其上的摄像头获取海底 图像,并确定进入摄像头视野的海参位置。遥控无人潜水器上的摄像头获取海参位置后,机 械臂根据海参位置调整抓取传送装置相对遥控无人潜水器的位置及抓取角度,使海参位于 抓取传送装置前端开口之间,之后推杆电机推动滑套向前运动。推杆电机推动滑套向前运 动时,两侧的内侧连杆向中间平行合拢,两侧同步带间距缩小,海参可便被抓取传送机构夹 持。当抓取传送机构夹持住海参后,同步带电机转动,带动内侧同步带向后运动,海参便可 被向后传送至机构基座喇叭口处。海参传送至机构基座喇叭口处时,海参收集装置的水泵 抽取海水,此时收集仓内形成负压,收集仓单向门克服铰链处扭簧弹力关闭,之后海参便能 被吸入机构基座通孔,通过软管,进入收集仓。收集仓前部安装的传感器感应到海参进入收 集仓后,发送信号,使水泵停止工作。水泵停止工作后,收集仓内负压消失,收集仓单向门在 铰链处扭簧的作用下打开,海参便可落入网兜。 较现有技术相比,本发明具有以下优点: 1、本发明提供的海参捕捞装置,将抓取装置和传送装置结合起来,这样可以将抓 取动作和传送动作一次性完成,避免了机械臂伸出抓取海参和收回将海参放入收纳装置的 过程,提高了海参捕捞装置的工作效率。 2、本发明提供的海参捕捞装置,将抓取捕捞方式和抽取捕捞方式结合起来,通过 先利用抓取传送装置使海参脱离海床一定高度,再利用抽取装置将海参通过管道吸入海参 收集装置的方式,避免了搅动海床上的泥沙,解决了装置工作时视线被干扰的问题。 综上,应用本发明的技术方案解决了现有海参捕捞装置工作效率低;搅动泥砂、干 扰作业同时破坏海底生态环境等问题。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 6 CN 111587850 A 说 明 书 4/6 页 有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发 明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以 根据这些附图获得其他的附图。 图1为本发明轴侧图; 图2为本发明海参收集装置及机械臂示意图; 图3为本发明收集仓示意图; 图4为本发明抓取传送机构示意图。 图中:1、抓取传送机构 101、机构基座 102、导轨 103、滑套 104、滑套连杆 105、 推杆电机 106、连架杆 107、指端连杆 108、内侧连杆 109、外侧连杆 110、同步带轮 111、 同步带 112、传动带 113、同步带电机 2、海参收集装置 201、收集仓 2011、仓体 2012、传 感器 2013、扭簧 2014、收集仓单向门 2015、过滤网 202、水泵203、双向排水口 204、网兜 205、软管 3、机械臂 301、抓取传送机构安装座 302、小臂 303、大臂 304、机械臂推杆电机 305、肩部306、底座 4、遥控无人潜水器。











