
技术摘要:
本申请属于机器人关节结构技术领域,涉及关节储能助力机构、机器人关节结构及机器人。该关节储能助力机构中,活动件相对于固定件转动设置,储能弹性件连接在两个基座之间,切换装置能使两个基座在一静一动状态、锁止状态与自由状态间切换。在需要储能时,使两个基座切 全部
背景技术:
目前,机器人关节结构在运动过程中有两个问题比较棘手:在特定位置、特定速度 和特定加速度时需要较大的力,此时如果单纯增加关节的转动动力件出力,则会增加关节 质量和体积,也会增加关节成本。在特定位置,尤其是重力势能在普通关节中无法储存,并 且转动动力件克服重力做功而导致能量损耗。
技术实现要素:
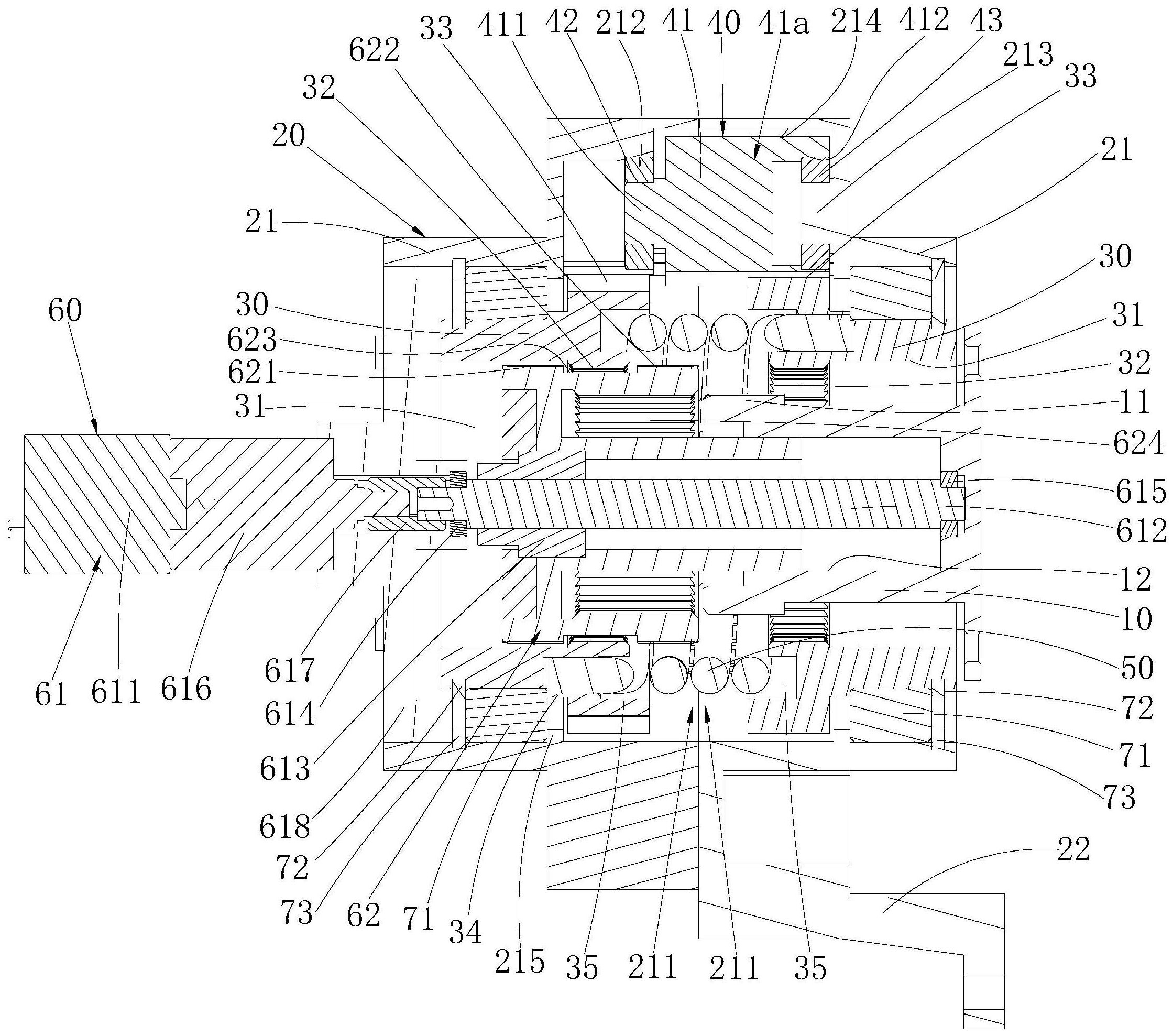
本申请实施例的目的在于提供一种关节储能助力机构、机器人关节结构及机器 人,以解决现有机器人关节结构的转动动力件质量和体积较大的技术问题。 本申请实施例提供一种关节储能助力机构,包括: 固定件; 活动件,相对于所述固定件转动设置; 两个基座,间隔设置,具有其中一个所述基座相对所述固定件静止而另外一个所 述基座相对所述固定件转动的一静一动状态、两个所述基座均相对所述固定件静止的锁止 状态及两个所述基座均相对所述固定件转动的自由状态; 传动组件,用于将所述活动件的动力传递至所述基座上; 储能弹性件,用于将所述活动件的动能转换为弹性势能,其两端一一对应地固定 于两个所述基座上;以及 切换装置,用于使两个所述基座在一静一动状态、锁止状态与自由状态之间切换。 可选地,所述切换装置包括直线驱动组件以及由所述直线驱动组件驱动移动的换 挡件,所述活动件相对所述固定件的转动轴线与所述换挡件的移动方向相互平行;所述换 挡件能够移动以使所述换挡件同时连接其中一个所述基座与所述固定件,或使所述换挡件 同时连接两个所述基座与所述固定件,或使所述换挡件、所述基座与所述固定件相互分离。 可选地,所述基座具有沿其轴线方向延伸的贯通槽,两个所述基座的贯通槽相对 设置,所述贯通槽的内壁设有第一内花键,所述换挡件具有第一外花键与第二外花键,所述 第一外花键与所述第一内花键相适配,所述第二外花键与所述第一内花键相适配;所述换 挡件能够沿所述基座的轴线方向在所述贯通槽内移动以使所述第一外花键或所述第二外 花键连接于所述第一内花键,或者所述第一外花键与所述第二外花键分别连接于两个所述 第一内花键,或者所述第一外花键与所述第二外花键均分离所述第一内花键。 可选地,所述第一外花键与所述第二外花键之间形成环形空位,所述环形空位在 所述换挡件的轴线方向上的宽度大于所述第一内花键在所述基座的轴线方向上的宽度。 可选地,所述固定件具有第三外花键,所述换挡件具有第三内花键,所述第三外花 4 CN 111590631 A 说 明 书 2/9 页 键与所述第三内花键相适配;所述换挡件能够移动以使所述第一外花键或所述第二外花键 连接于所述第一内花键且所述第三内花键连接于所述第三外花键,或者所述第一外花键与 所述第二外花键分别连接于两个所述第一内花键且所述第三内花键连接于所述第三外花 键,或者所述第一外花键与所述第二外花键均分离所述第一内花键且所述第三内花键分离 于所述第三外花键。 可选地,所述换挡件包括筒状体及连接于所述筒状体的导向轴,所述第一外花键、 所述第二外花键与所述第三内花键均设于所述筒状体上;所述固定件上开设有导向槽,所 述导向轴插设于所述导向槽以限定所述导向轴的周向位置。 可选地,所述直线驱动组件包括安装座、安装于所述安装座上的转动驱动件、由所 述转动驱动件驱动转动的丝杆,以及沿所述丝杆的轴线方向移动的滑块,所述滑块具有与 所述丝杆螺纹连接的螺孔,所述滑块安装于所述换挡件上,所述丝杆穿过所述换挡件设置。 可选地,所述丝杆的一端通过第一轴承支承在所述安装座上,另外一端通过第二 轴承支承在所述固定件上。 可选地,所述直线驱动组件还包括连接于所述转动驱动件的输出轴的减速器,以 及连接于所述减速器与所述丝杆之间的联轴器。 可选地,每个所述基座均具有外齿圈,所述传动组件包括转动安装于所述活动件 上的若干行星齿轮对,每一所述行星齿轮对均包括两个相啮合的行星齿轮,同一所述行星 齿轮对中的两个所述行星齿轮一一对应地与两个所述基座的所述外齿圈相啮合。 可选地,所述活动件包括两个行星架,两个所述行星架均呈环状,两个所述行星架 的其中一端开口相对设置,两个所述基座分别设于两个所述行星架的内腔,所述行星齿轮 对设于两个所述行星架的相对开口处。 可选地,所述行星齿轮的其中一轴向端面凸设有连接轴,另外一轴向端面开设有 安装槽;其中一个所述行星架开设有连接槽,另外一个所述行星架凸设有安装轴;所述连接 轴通过第三轴承支承于所述连接槽的内壁,所述安装轴通过第四轴承支承在所述安装槽的 内壁。 可选地,所述行星架开设有与其内腔连通的容纳槽,所述行星齿轮设于所述容纳 槽内。 可选地,两个所述基座分别通过第五轴承支承在两个所述行星架的内壁上。 可选地,所述基座的靠近所述外齿圈处设有环形台阶,所述行星架的内壁在靠近 所述外齿圈处设有环形凸缘;所述基座的外周面卡设有外卡簧,所述行星架的内壁卡设有 内卡簧;所述第五轴承的内圈的两个轴向端面分别抵设于所述环形台阶与所述外卡簧,所 述第五轴承的外圈的两个轴向端面分别抵设于所述环形凸缘与所述内卡簧。 可选地,两个所述基座的相对端面均开设有环形凹槽,所述储能弹性件的两端分 别设于两个所述环形凹槽内。 可选地,所述储能弹性件为螺旋弹簧,所述螺旋弹簧与所述活动件同轴设置。 本申请实施例提供一种机器人关节结构,包括上述的关节储能助力机构、固定臂、 转动安装于所述固定臂上的活动臂,以及用于驱动所述活动臂转动的转动动力件,所述固 定件连接至所述固定臂,所述转动动力件安装于所述固定臂或所述固定件上,所述转动动 力件的输出轴连接至所述活动臂或所述活动件上,所述活动臂连接至所述活动件。 5 CN 111590631 A 说 明 书 3/9 页 本申请实施例提供一种机器人,包括上述的关节储能助力机构。 本申请实施例提供的上述一个或多个技术方案至少具有如下技术效果之一:该关 节储能助力机构中,活动件相对于固定件转动设置,储能弹性件连接在两个基座之间,切换 装置能使两个基座在一静一动状态、锁止状态与自由状态间切换。关节在任意位置需要储 能时,使两个基座切换至一静一动状态,此时,活动件接受转动动力件的动力或连接于活动 件的活动臂的重力势能并且转换为动能,传动组件将活动件的动能传递给可活动的基座, 两个基座产生角度差,储能弹性件扭曲变形以将活动件的动能转换为弹性势能以实现储 能。活动件回程时,储能弹性件释放储存的能量并经过传动组件传递至活动件以带动活动 件转动。使两个基座切换至锁止状态时,活动件的动力经过传动组件传递至基座与固定件, 活动件与固定件相当于固联。使两个基座切换至自由状态时,储能弹性件无法储能,相当于 没有储能弹性件。关节储能助力机构、机器人关节结构及机器人,通过适时地擒纵储能弹性 件,可实现储能弹性件的储能与释放能量,让关节能够在需要时主动地将能量储存在储能 弹性件上,而在需要能量时将能量释放出来,从而达到节省能量以及增加爆发力的目的。该 关节储能助力机构结构紧凑,体积小,能够在有限空间内储存较大的能量,并在有限角度内 达到较大扭力。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例或现有技术描述 中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些 实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些 附图获得其他的附图。 图1为本申请实施例提供的关节储能助力机构的立体装配图; 图2为图1的关节储能助力机构中应用的活动件的立体分解图; 图3为图1的关节储能助力机构的立体分解图,活动件未示; 图4为图3的关节储能助力机构中应用的基座、储能弹性件、传动组件的立体分解 图; 图5为图3的关节储能助力机构中应用的切换装置的立体分解图; 图6为图1的关节储能助力机构在两个基座处于自由状态的剖视图; 图7为图1的关节储能助力机构在两个基座处于一静一动状态的剖视图; 图8为图1的关节储能助力机构在两个基座处于锁止状态的剖视图; 图9为图1的关节储能助力机构在两个基座处于另一种一静一动状态的剖视图; 图10为图1的关节储能助力机构应用于机器人关节结构的结构示意图。











