
技术摘要:
本申请适用于设备控制技术领域,提供了一种外骨骼输出力的确定方法及装置,所述外骨骼输出力的确定方法包括:获取目标外骨骼当前时刻的实时参数;将所述实时参数导入预设的神经网络,确定所述目标外骨骼对应的实时输出力;所述神经网络是基于外骨骼样机运行过程中的训 全部
背景技术:
近年来,随着机电一体化技术、机器人技术及运动意图感知技术的发展,可穿戴式 外骨骼机器人技术逐渐走进广大群众的视野里。外骨骼机器人是一种与人体并联的可穿戴 智能机器人,穿戴者和外骨骼机器人需要融为一体进行辅助工作,理想状态下外骨骼机器 人就像是我们身体内的骨骼一样提供支撑及力量。通过穿戴合适的外骨骼机器人可以帮助 穿戴者正常站立行走或者提高肢体运动性能,大大地提升穿戴者的肢体机能力量。 目前,已经出现了的外骨骼机器人产品,但其定价远高于用户预期,导致难以实现 大规模的应用,其主要原因之一是因为需要安装多种传感器导致价格过高,特别是确定外 骨骼输出力的力传感器。目前常用的力传感器,其单价昂贵,同时为了减少其他干扰因素对 外骨骼输出力测量精度的影响,往往还需要配套相应的信号处理设备,这又进一步增加了 外骨骼的造价,造成外骨骼难以取得大规模的应用。
技术实现要素:
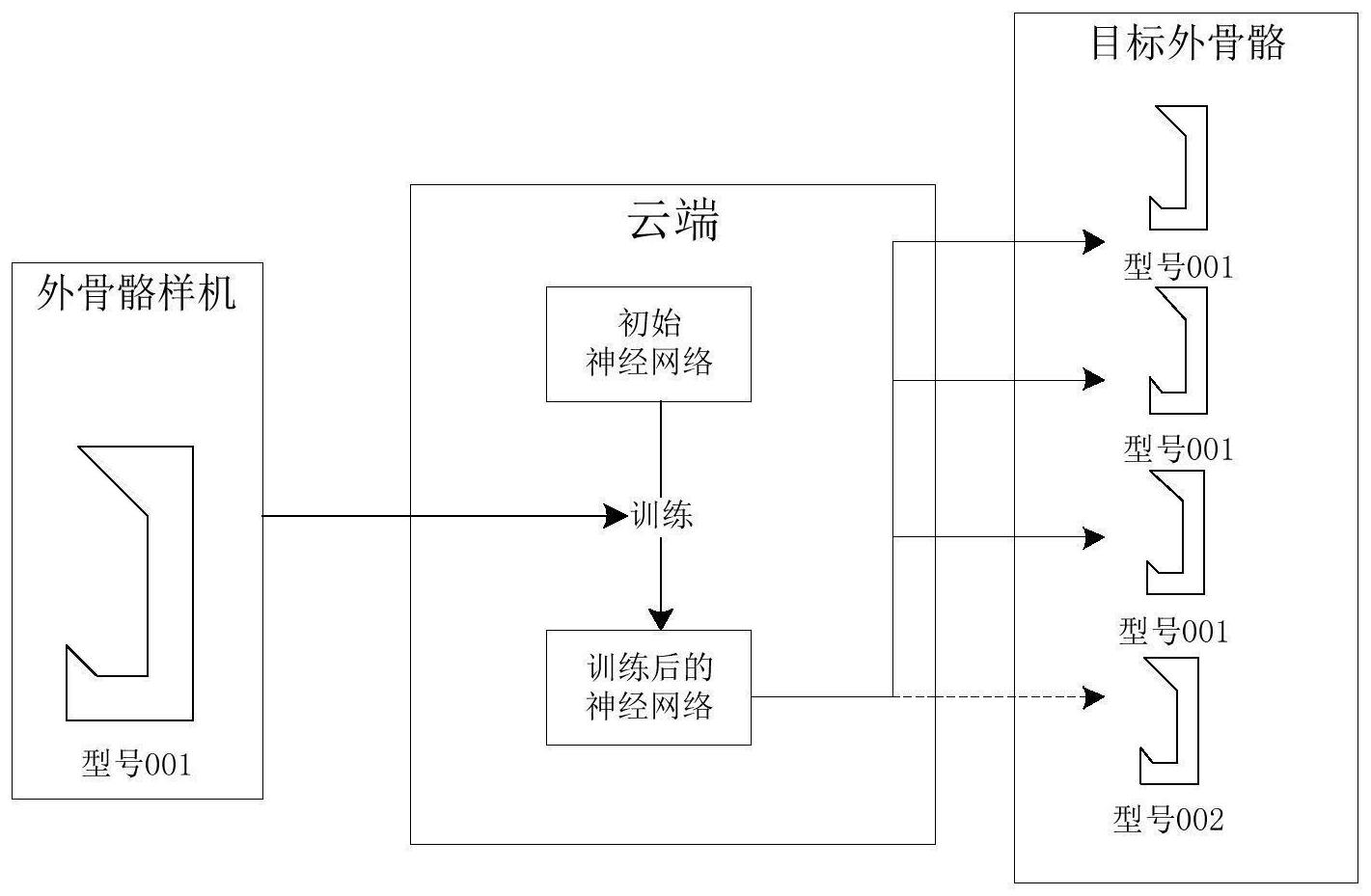
本申请实施例提供了一种外骨骼输出力的确定方法及装置,该方法使用神经网络 模型代替力传感器来确定外骨骼输出力,从而能降低外骨骼的制造成本,解决现有技术中 外骨骼制造成本过高的问题。 第一方面,本申请实施例提供了一种外骨骼输出力的确定方法,包括:获取目标外 骨骼当前时刻的实时参数;将所述实时参数导入预设的神经网络,确定所述目标外骨骼对 应的实时输出力;所述神经网络是基于外骨骼样机运行过程中的训练数据集训练得到的。 在第一方面可能实施的方式中,在将所述实时参数导入预设的神经网络,确定所 述目标外骨骼对应的实时输出力之后,还包括:基于实时运动信息确定实时期望力;基于所 述实时期望力以及所述实时输出力,调整所述外骨骼的控制器参数。 第二方面,本申请实施例提供了一种外骨骼输出力的确定装置,包括:实时参数获 取模块,用于获取目标外骨骼当前时刻的实时参数;实时输出力确定模块,用于将所述实时 参数导入预设的神经网络,确定所述目标外骨骼对应的实时输出力;所述神经网络是基于 外骨骼样机运行过程中的训练数据集训练得到的。 第三方面,本申请实施例提供了一种终端设备,包括:存储器、处理器以及存储在 所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时 实现上述第一方面中任一项所述的方法。 示例性的,该终端设备可以是安装在外骨骼上的,也可以是通过网络与外骨骼连 接。 应理解,本申请提供的确定方法可以在不同的终端设备上执行不同的步骤,以达 到高效便捷的效果,例如第一终端设备安装在外骨骼上,通过网络传输数据至第二终端设 4 CN 111590544 A 说 明 书 2/11 页 备,第二终端设备通过网络与外骨骼连接。第一终端设备将数据传输给第二终端设备之后, 第二终端设备执行训练神经网络的过程,并将训练好的神经网络传输至第一终端设备,以 代替现有技术中外骨骼的力传感器,来确定外骨骼的输出力。 第四方面,本申请实施例提供了一种计算机可读存储介质,包括:所述计算机可读 存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面中任一项 所述的方法。 第五方面,本申请实施例提供了一种计算机程序产品,当计算机程序产品在终端 设备上运行时,使得终端设备执行上述第一方面中任一项所述的方法。 可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的 相关描述,在此不再赘述。 本申请实施例与现有技术相比存在的有益效果是: 现有技术使用力传感器测量外骨骼输出力,本申请提供的确定方法通过训练好的 神经网络代替力传感器确定外骨骼输出力,减少了现有技术中因力传感器带来的外骨骼制 造成本,解决了现有技术中外骨骼制造成本过于高昂的问题。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例或现有技术描述 中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些 实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些 附图获得其他的附图。 图1是本申请第一实施例提供的确定方法的实现流程图; 图2是本申请一实施例提供的实际应用效果示意图; 图3是本申请一实施例提供的预测输出力与实际输出力的对比函数图; 图4是本申请一实施例提供的人体的一个步伐周期示意图; 图5是本申请一实施例提供的神经网络结构图; 图6是本申请第二实施例提供的确定方法的实现流程图; 图7是本申请第三实施例提供的确定方法S601的实现流程图; 图8是本申请第四实施例提供的确定方法S603的实现流程图; 图9是本申请第五实施例提供的确定方法的实现流程示意图; 图10是本申请一实施例提供的确定装置结构示意图; 图11是本申请一实施例提供的终端设备结构示意图;











