
技术摘要:
本发明结合无人驾驶技术优势以及矿车与铲协同作业的需求,提出一种基于无人驾驶矿卡在装载区智能循铲的交互方法,在无人驾驶矿卡上安装第一车载终端、车辆感知模块、车辆控制模块以及第一车辆定位模块,在铲车上安装第二车载终端、矿车停靠角度指挥模块以及第二车辆定 全部
背景技术:
矿料装载是矿区生产作业流程中的重要环节之一,需要在矿车与铲车安全定位的 基础上,由铲车控制铲臂挖掘并装载至矿车箱槽,由矿车将矿料安全运输出目的地,整个装 载过程依靠矿车与铲车的密切协同配合。而目前矿车与铲车的协同配合方案多为人工调度 与控制,装载效率低,且安全系数小,严重制约着当前矿山的生产运营经济发展。 随着大数据、传感器、5G通讯、人工智能等高新技术的推进和不断突破,无人驾驶 技术逐步成熟,其自主可控的高效率、高保障优势特点与矿山的“数字型、效益型、环保型、 学习型、创新型、安全型”建设目标相契合。无人驾驶技术集V2X通信技术、车载传感技术、决 策规划技术以及智能控制技术与一体,能够实现矿车的自主可控以及与铲车的自动装载协 同配合,保证装载流程的有序性、高效性和安全性。
技术实现要素:
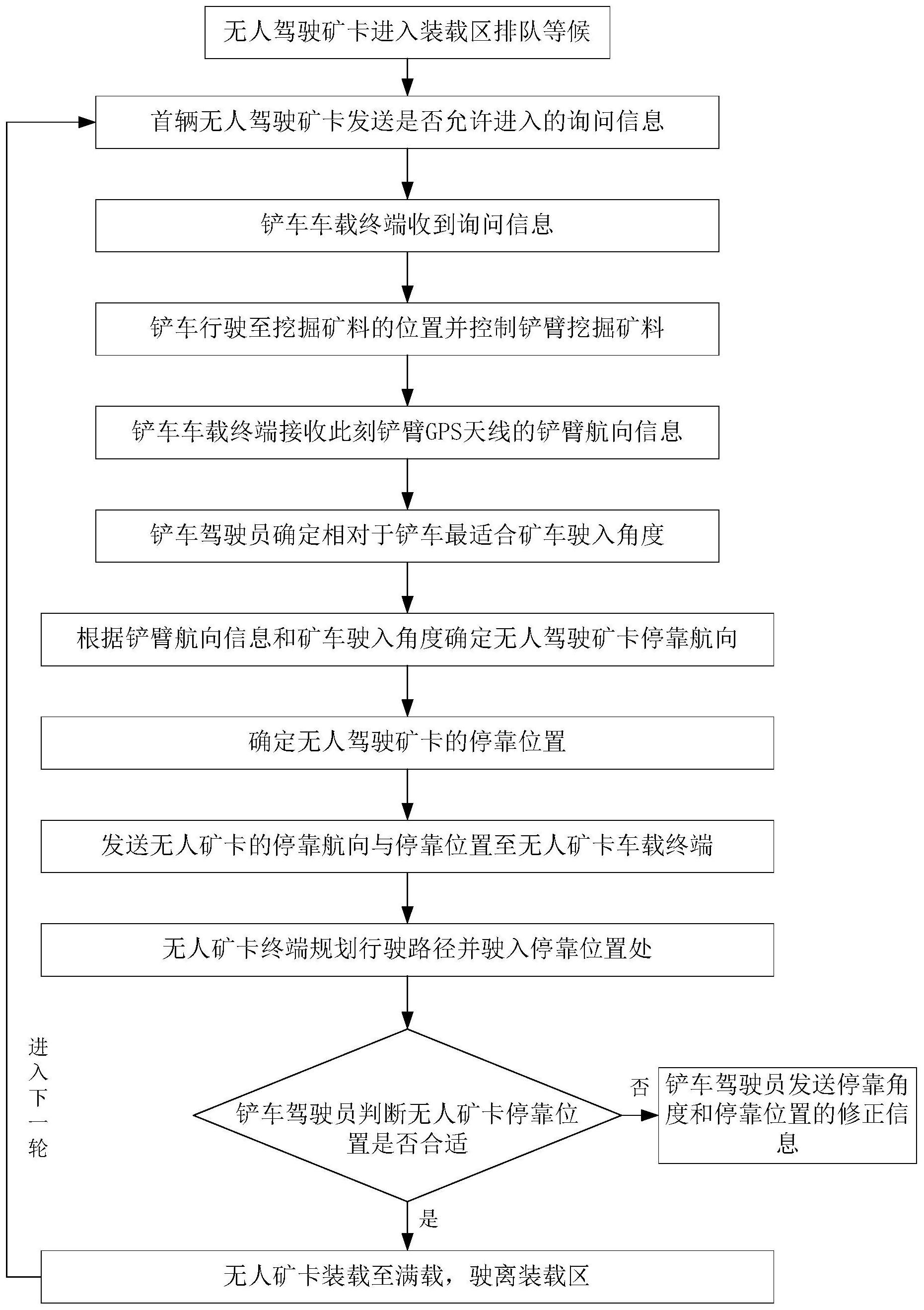
为了解决上述已有技术存在的不足,本发明结合无人驾驶技术优势以及矿车与铲 协同作业的需求,提出一种基于无人驾驶矿卡在装载区智能循铲的交互方法,以提高矿区 矿料装载效率,本发明的具体技术方案如下: 一种基于无人驾驶矿卡在装载区智能循铲的交互方法,其特征在于,在无人驾驶 矿卡上安装第一车载终端、车辆感知模块、车辆控制模块以及第一车辆定位模块,在铲车上 安装第二车载终端、矿车停靠角度指挥模块以及第二车辆定位模块,其中, 所述第一车载终端用于与铲车通讯并控制无人驾驶矿卡自主完成与铲车的协同 装载作业;所述车辆感知模块包括相机和毫米波雷达,用于车辆行驶过程中实时感知周围 环境信息;所述车辆控制模块用于接收车载终端控制指令,控制无人驾驶矿卡自主行驶;所 述第一车辆定位模块即安装于无人驾驶矿卡的GPS天线,与第一车载终端输入端相连,用于 无人驾驶矿卡的定位; 所述第二车载终端用于与无人驾驶矿卡通讯;所述矿车停靠角度指挥模块用于确 定无人驾驶矿卡相对于铲车铲臂的停靠角度并发送至第一车载终端;所述第二车辆定位模 块即安装于铲车铲臂上的GPS天线,与第二车载终端输入端相连,用于确定铲车铲臂的航向 角; 所述智能循铲的交互方法包括以下步骤: S1:无人驾驶矿卡到达装载区入口处排队等待进入装载区; S2:装载区入口处首辆无人驾驶矿卡向本装载区内的第二车载终端发送是否允许 进入的装载区的询问信息; S3:第二车载终端收到询问信息,驾驶员控制铲车行驶至挖掘矿料的位置控制铲 4 CN 111572559 A 说 明 书 2/5 页 臂挖掘矿料,并接收第二车辆定位模块的铲臂航向信息ψc; S4:铲车驾驶员根据装载区地形,在第二车载终端屏幕上点击矿车停靠角度选项 确定相对于铲车最适合矿车驶入角度θ,矿车停靠角度选项由矿车停靠角度指挥模块所设 置,方法如下: S4-1:以铲车铲臂为基准线0°,逆时针方向可达最大角度为 90°,顺时针方向可达 最小角度为-90°; S4-2:将0°~ 90°范围进行n等分,则0°~ 90°包含的度数值为0°,90°/n,2*90°/ n,...,90°; 将-90°~0范围同样进行n等分,则-90°~0°包含的度数值为0°,-90°/n,-2*90°/ n,...,-90°; S4-3:步骤S4-2中的n由矿车停靠角度指挥模块内的基础角度调整模块确定,n的 默认值为2,基础角度调整模块设置有“ ”和“-”标志按钮,“ ”标志按钮按下能够增加n的 值,“-”标志按钮按下能够减少n的值; S5:根据铲臂航向信息ψc和矿车驶入角度θ确定无人驾驶矿卡的停靠航向ψk,即ψk =ψc-θ; S6:确定无人驾驶矿卡的停靠位置,具体方法如下: S6-1:确定无人驾驶矿卡箱槽中心的停靠位置: S6-1-1:铲车铲臂控制铲斗挖掘起矿料,将铲斗仰至距无人驾驶矿卡箱槽安全距 离的高度; S6-1-2:旋转铲臂至无人驾驶矿卡的停靠航向ψk,此时铲斗垂直投影至大地坐标 系的坐标位置即无人驾驶矿卡箱槽中心的停靠位置; S6-2:在步骤S6-1确定的无人驾驶矿卡箱槽中心的停靠位置和步骤S5确定的无人 驾驶矿卡的停靠航向ψk处,规定无人驾驶矿卡的车头朝向背对铲车; S7:第二车载终端将无人驾驶矿卡停靠航向ψk和无人驾驶矿卡箱槽中心的停靠位 置发送至装载区入口处首辆无人驾驶矿卡的第一车载终端; S8:装载区入口处首辆无人驾驶矿卡的第一车载终端通过信息处理,以当前位置 为起点,以接收到的停靠位置为终点,在当前装载区地形和路况的约束下,规划期望行驶路 径; S9:无人驾驶矿卡的车辆感知模块实时感知周围路况,车辆控制模块控制车体沿 期望行驶路径行驶至停靠位置处; S10:铲车驾驶员再次点击基础角度调整模块上的“ ”和“-”标志按钮,调整矿车停 靠角度选项,选择矿车驶入角度θ修正无人驾驶矿卡停靠航向ψk和停靠位置,将修正结果发 送至第一车载终端,使无人驾驶矿卡按照修正结果控制车体,直至满足铲车驾驶员期望结 果; S11:无人驾驶矿卡满载后,驶出装载区。 进一步地,无人驾驶矿卡与铲车通信方式为5G或4G。 本发明的有益效果在于: 1.本发明的方法实现了矿车自动协同配合铲车作业,克服了人工参与矿车调度及 控制的低效率及高错误缺陷; 5 CN 111572559 A 说 明 书 3/5 页 2.本发明的方法由铲车司机根据自身装载习惯确定矿车停靠角度,同时监督矿车 的自动化作业流程,使无人驾驶矿卡更符合人类作业习惯; 3.本发明是大数据、传感器、5G通讯、人工智能等高新技术结合的产物,充分响应 了当前矿山智慧发展的理念。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附 图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不 付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中: 图1为本发明的方法流程图; 图2为本发明矿寻铲交互系统示意图; 图3为本发明矿车停靠角度指挥模块。











