
技术摘要:
本发明属于智能控制技术领域,涉及用于海洋浮标绞车升降的智能控制系统及方法。该系统包括岸基数据接收站、通讯模块、浮标数据采集单元、绞车控制模块;所述浮标数据采集单元用于采集浮标气象数据、水文数据;并将采集的数据通过通讯模块发送到岸基数据接收站;所述岸 全部
背景技术:
随着我国海洋强国战略的实施,海洋剖面数据观测可为科学研究和海洋畜牧业提 供数据支持,这其中海洋浮标作为自动化观测平台,起着非常重要的作用,受到各个涉海科 研部门及海洋牧场的重视。 近年来,随着科技进步和发展,海洋浮标开始搭载绞车系统,来控制海洋观测设备 的下潜和上升,进而获取海洋剖面观测数据,实时观测海洋中某个位置的水文剖面数据。将 剖面温度、盐度、水质、溶解氧、PH、压力等观测数据发送至岸基接收站,给科学研究和海洋 畜牧业带来数据支撑。 现有的海洋浮标绞车通过设定好的参数来控制海洋观测设备的下潜和上升。实际 情况中,此种方式受天气影响较大,当出现极端天气时,例如台风、海啸引起大风和巨浪或 是浮标能源补充不足时,造成浮标姿态变化过大,加之极端天气会引起的海水流速大,绞车 在下潜和上升过程中钢缆因遭受外力过大,导致钢缆扭曲变形甚至断裂,造成剖面观测设 备损毁甚至丢失等事故。 如何能够根据天气变化适时调整海洋浮标绞车运动状态,以应对不同天气状况下 对绞车的影响,延长绞车使用寿命,避免剖面观测设备损毁,是当前需要解决的重要问题。
技术实现要素:
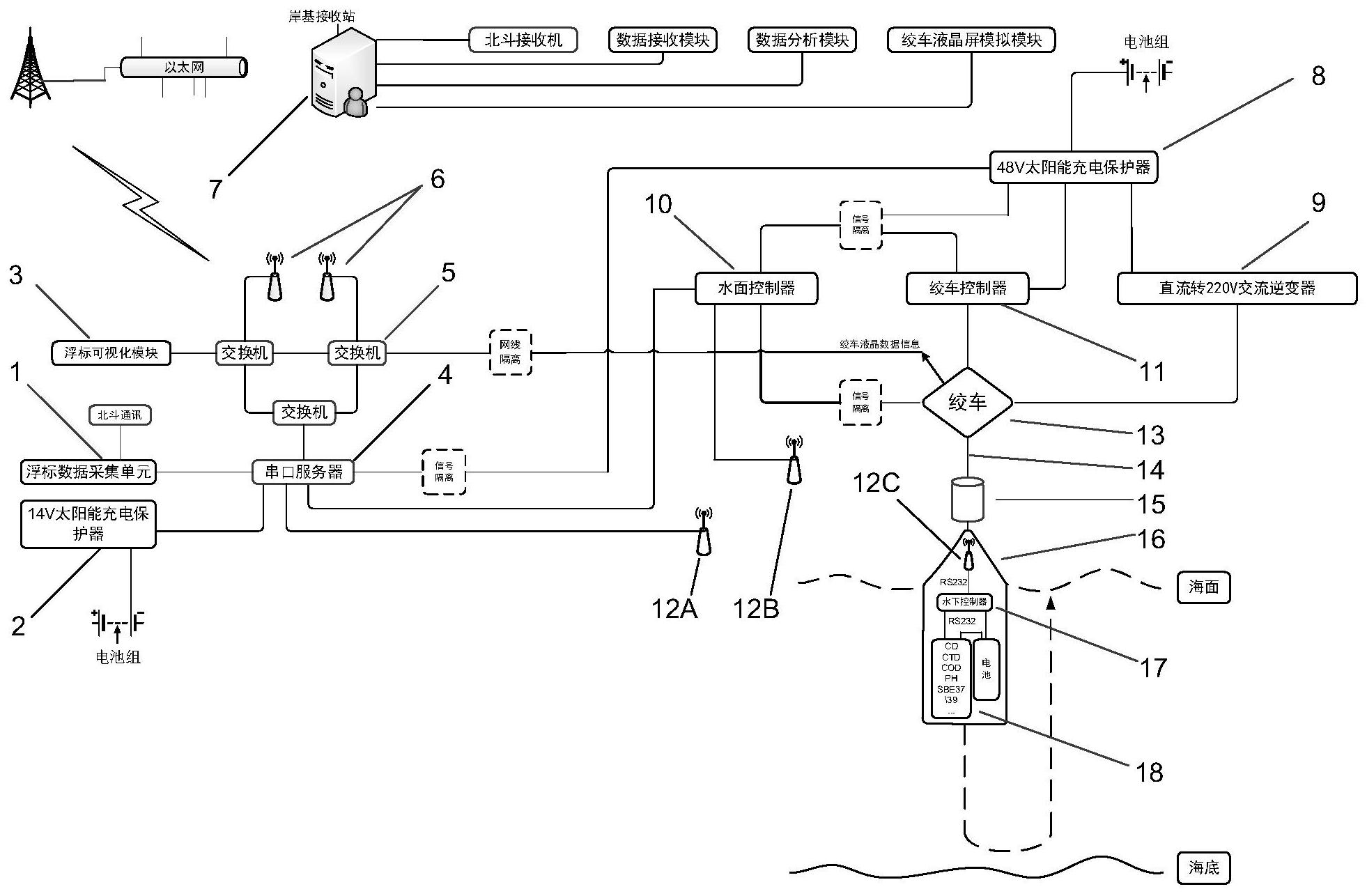
本发明的目的是提供一种海洋浮标绞车升降智能控制系统及方法,利用海洋浮标 所测量的气象参数、海浪参数、浮标能源补充信息等数据信息,形成绞车运动状态的最佳方 案,控制系统根据最佳方案对浮标绞车的运动状态进行控制,使得绞车释放传动钢缆的速 度发生变化,保证浮标绞车在最佳状态下工作,保证剖面观测数据采集效率同时最大限度 的增大绞车安全工作系数和绞车使用寿命。 为了实现上述目的,本发明采用的技术方案是:一种海洋浮标绞车升降智能控制 系统,包括岸基数据接收站、通讯模块、浮标数据采集单元、绞车控制模块; 所述浮标数据采集单元用于采集浮标气象数据、水文数据;并将采集的数据通过通讯 模块发送到岸基数据接收站; 所述岸基数据接收站用于接收所述浮标数据采集单元采集的气象、水文数据,并对气 象、水文数据进行分析,生成绞车运动控制代码; 所述绞车控制模块用于接收所述岸基数据接收站发送的绞车运动控制代码,控制绞车 的运动。 作为本发明的一种优选方式,所述的浮标数据采集单元包括气象传感器和水文传 感器,所述气象传感器用于采集风速数据,所述水文传感器用于海面波高、浪高数据、海流 4 CN 111613039 A 说 明 书 2/5 页 流速数据。 进一步优选地,所述岸基数据接收站包含岸基接收服务器、数据接收模块,数据分 析模块;所述数据接收模块,数据分析模块安装在所述岸基接收服务器上,数据接收模块用 于接收浮标数据采集模块发送的气象、水文数据,并将数据储存;所述的数据分析模块利用 风速、波高、浪高、海流流速数据,通过分析判断,得出绞车速度控制代码,并将代码发送至 绞车控制模块。 进一步优选地,所述的数据接收模块还用于获取浮标太阳能充电控制器发送的充 放电信息并储存;数据分析模块利用所述的充放电信息,生成绞车工作间隔代码,控制绞车 工作频率。 进一步优选地,所述的绞车控制模块包括水面控制器和绞车控制器,所述的水面 控制器用于接收所述岸基数据接收站下发的绞车运动控制代码,解算成控制信号,控制绞 车控制器;所述的绞车控制器用于根据水面控制器的控制指令,控制绞车的收放速度和工 作间隔。 进一步优选地,所述的通讯模块包括环形网络通信系统,所述的环形网络通信系 统主要由4G路由器,网络交换机群组,串口服务器组成。 进一步优选地,所述的通讯模块还包括北斗通讯系统、无线通讯传感器,北斗通讯 系统用于浮标数据采集单元的数据发送;所述无线通讯模块用于岸基数据接收站与绞车控 制模块之间的通讯。 进一步优选地,还包括浮标可视化模块,用于对浮标体拍摄视频和对传感器拍摄 视频,并将拍摄的视频实时发送至岸基接收站并存储。 本发明实现其目的采用的另一种技术方案是:一种海洋浮标绞车升降智能控制方 法,包括:第一步,浮标数据采集单元将浮标气象、水文、姿态传感器的数据报文发送至岸基 接收站并存储至数据库; 太阳能控制器将浮标供电系统的充放电信息主动发送至岸基接收站并存储至数据库; 第二步、数据分析模块根据预先设定的风速、浪高、海流流速的等级及对应的绞车收放 速度,对实时采集的数据进行判断,生成绞车的收放速度控制代码; 根据太阳能充电控制器的充放电信息,生成绞车工作间隔延长代码; 第三步、将生成的绞车收放速度控制代码、工作间隔延长代码发送到绞车控制模块,控 制绞车的收放速度、工作间隔。 进一步优选地,所述第二步中,以风、浪、流三个参数的实时测量值中级别最大的 参数为准,进行判断:从一到四级,随着等级的递增,绞车的收放速度逐级递减;第四级时, 绞车停止工作。 进一步优选地,所述第二步中,当太阳能充电控制器连续多日的日充电量小于日 放电量时,生成绞车工作间隔延长代码。 本发明提供的海洋浮标绞车升降智能控制系统及方法,根据实时气象数据、海浪 数据、海流信息、浮标充放电状态数据综合分析得到绞车运动状态最佳方案,智能控制绞车 的下潜和上升速度,进行海洋剖面数据观测。本发明具有成本低、超低功耗、易安装、数据接 收率高、远程控制及时等优点,为海洋浮标剖面观测提供了有效手段,对海洋科研、经济和 新能源利用等多个领域的发展具有重要意义。 5 CN 111613039 A 说 明 书 3/5 页 附图说明 图1 为本发明海洋浮标绞车升降智能控制系统的原理示意图; 图2 为本发明海洋浮标绞车升降智能控制系统的结构图; 图3是本发明海洋浮标绞车升降智能控制方法流程示意图。











